基于模型补偿自抗扰的弹体滚转角控制策略
2021-03-09 07:38吴正平
探测与控制学报 2021年1期
吴正平,邓 聪
(三峡大学电气与新能源学院,湖北 宜昌 443002)
0 引言
干扰弹在作战过程中,需要调整弹体的滚转角去对准敌方武器并发出干扰信号,起到干扰作战的功能[1]。弹体滚转通道的稳定性与迅速调整滚转角的能力是能够实现干扰弹精确对准、稳定飞行控制的关键;但干扰弹现在所处的作战环境也日益复杂,在飞行过程中,会受到各种各样的干扰例如气动摩擦产生的干扰力矩、电机轴承间的干扰等等。这些干扰力矩的存在,增加了弹体滚转角控制的难度[2]。
文献[3]提出了基于鲁棒控制的策略,文献[4]提出了双闭环控制策略,文献[5]提出了基于变结构控制的策略,虽然在理想的仿真环境下可以达到很好的控制效果,但在实际控制系统中,由于模型建立不精确以及未知扰动的存在,在实际运用中的效果难以保证。文献[6]提出基于线性二次型调节器的滚转控制方法,在扰动变化较大时会影响观测器的精度,抗扰性不强,进而导致控制精度降低。文献[7]提出了一种基于模糊控制的滚转角控制策略,对控制器的参数进行在线调整,但随着精度要求越高,模糊控制器的决策就越慢,有可能会导致无法实时控制的情况。
本文针对传统控制策略存在的不足,提出了基于模型补偿自抗扰的弹体滚转角控制策略,通过对弹体滚转角控制系统进行数学建模,建立扩张状态观测器,再将扩张状态观测器的观测量作为模型已知信息,增加到干扰补偿中,并分析了该控制策略的稳定性。
1 数学模型
1.1 弹体滚转通道数学模型
本文的实验对象弹体滚转通道控制系统核心部件为反作用飞轮、滚转本体(弹体)、旋转翼等。反作用飞轮由伺服电机、伺服驱动器、角度检测电路、反作用飞轮轮体等组成。
对弹体滚转通道由角动量守恒定理可得:
(1)
式(1)中,Jb为滚转本体的转动惯量,a为摩擦系数,θ为滚转角,Jw为反作用飞轮的转动惯量,Ω为反作用飞轮角速度,Md为干扰力矩。
滚转角串级控制系统结构框图如图1所示,其中θ0和θ分别是期望的滚转角与实际的滚转角,Tf1和Tf2都是干扰力矩。内环控制采用PD控制,达到快速控制的目的,外环使用模型补偿自抗扰控制策略以满足系统抗扰性、精确度的要求。

图1 滚转角串级控制系统结构框图Fig.1 Structure diagram of roll angle cascade control system
1.2 扩张状态空间表达式的建立
(2)

(3)
(4)
由此,建立了以反作用飞轮角加速度为控制量输入,弹体滚转角为输出的系统扩张状态空间表达式。下面根据以上系统,进行控制策略设计。
2 基于模型补偿自抗扰的弹体滚转角控制策略
传统形式的自抗扰控制器设计,对系统数学模型并无过多的借鉴,只需知道系统的阶数,进而设计高于系统一阶的扩张状态观测器[8]。要想达到良好的控制效果,其中z3对总干扰f的准确估计是很重要的。传统自抗扰控制中,当干扰出现剧烈的变化时,对扩张状态观测器来说是一个很大的挑战,很可能精度降低甚至难以跟踪。
2.1 滚转角控制系统的模型补偿自抗扰控制策略
由第一章中建立的数学模型可知,本系统的部分模型已知,可以补偿到扩张状态观测器中来增加观测器的稳定性。
由式(3)和式(4)建立模型补偿的扩张状态观测器如下:

(5)
下面先进行观测器的极点配置,将其极点配置在-ω0。
(6)
由式(6)即可得:l1=a+3ω0,l2=(3a+3)ω02+(3a2+3a)ω0+a3+a2,l3=ω03。
最后,基于模型补偿的三阶扩张状态观测器形式如下:
(7)
式(7)中,z1是对滚转角的观测,z2是对(a+1)倍的滚转角速度的观测,z3是对干扰f1的观测。若能够准确实现对每个状态的观测,设计如下控制器:
(8)
(9)
此时z3≈f+(b-b0)-az2,与传统自抗扰控制相比,z3需要跟踪的干扰量大大减小,跟踪精度也会有所提升。
弹体滚转角外环模型补偿自抗扰控制系统结构框图如图2所示。
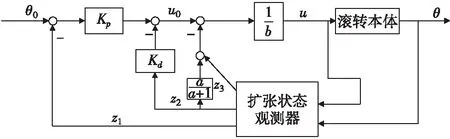
图2 弹体滚转角外环自抗扰控制系统结构框图Fig. 2 Structural diagram of auto disturbance rejection control system for outer ring of rolling angle of projectile
2.2 收敛性与跟踪误差分析
由式(7)可求得z1、z2、z3的传递函数如下:
(10)

(11)
(12)

(13)

(14)
(15)
考虑到分析典型性,y、u均取幅值为K的阶跃信号y(s) =K/s,u(s) =K/s, 则可以求得稳态误差:
(16)
由式(16)可知,所设计的模型补偿自抗扰控制策略具有很好的收敛性与跟踪性能,能够实现对系统状态变量和扰动的无差估计。
3 仿真与实验分析
3.1 Simulink仿真
为便于分析,由式(1)建立的数学模型在Simulink环境下搭建弹体滚转角控制系统。系统所取参数为:反作用飞轮的转动惯量Jw=0.078 kg·m2,滚转本体的转动惯量Jb=0.026 kg·m2,摩擦系数a=0.8。自抗扰控制器参数选取为:观测器极点ω0=-10,控制器极点ωc=-8。在设定1 s时进行阶跃输入,2 s时有阶跃干扰,有如图3—图5的仿真图。
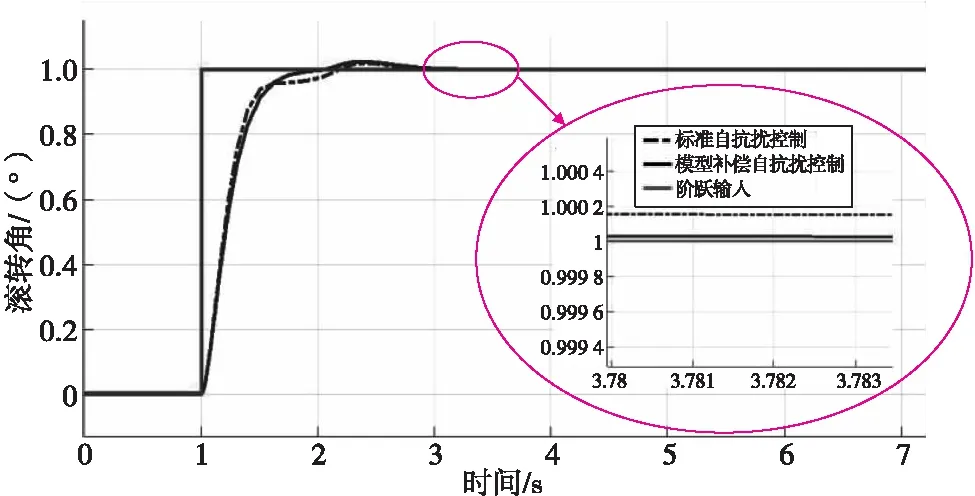
图3 阶跃输入响应图Fig.3 Step input response diagram
由阶跃输入响应图3可知,模型补偿自抗扰控制调节时间明显比传统自抗扰控制时间短,调节的精度也比传统自抗扰控制高。
图4是z1、z2跟踪效果对比图,由z1对滚转角跟踪图4(a)、(b)可知,传统自抗扰控制与模型补偿自抗扰控制都可以很好实现对滚转角的跟踪。
由z2跟踪图4(c)、(d)可知,z2(模型补偿自抗扰控制)对(a+1)倍滚转角速度的跟踪存在的误差比z2(传统自抗扰控制)对滚转角速度的跟踪误差要小。

图4 z1、z2跟踪效果对比Fig.4 Comparison of tracking effect between z1 and z2

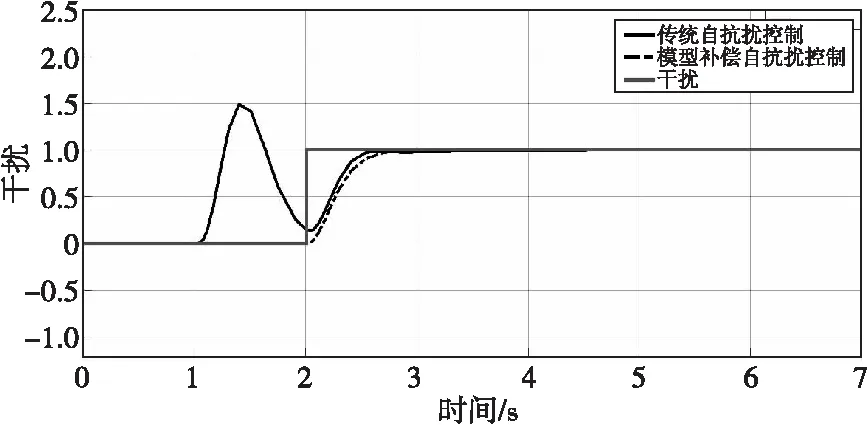
图5 z3(对干扰的跟踪)Fig.5 z3 (tracking interference)
3.2 弹体滚转控制系统实验
搭建如图6所示系统实物图,图6中1是旋转翼与反作用飞轮相连接,可增大其转动惯量,2用来配置转动惯量,与实际被控对象的转动惯量一致。进行了连续50°阶跃输入实验。图7是状态曲线图,图8是系统响应曲线图。由图可见基于模型补偿的自抗扰控制可以达到对弹体滚转角控制的精度、抗扰性的要求。

图6 系统实物图Fig.6 Physical system diagram
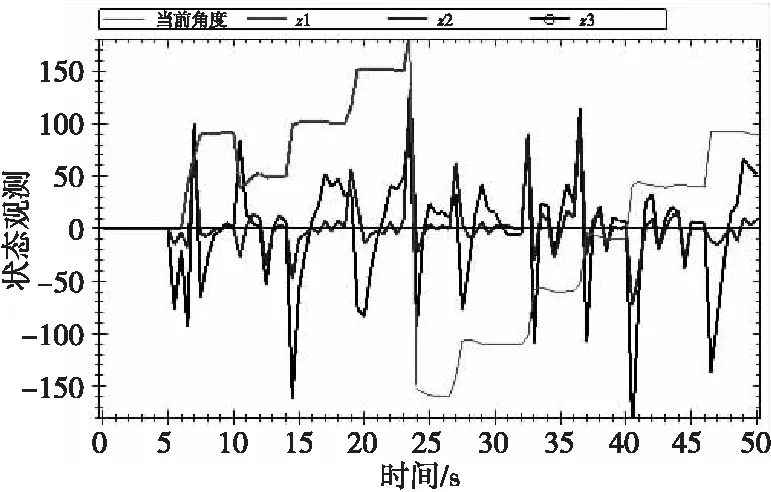
图7 状态曲线图Fig.7 State curve

图8 系统响应曲线图Fig.8 System response curve
4 结论
本文提出了基于模型补偿自抗扰的弹体滚转角控制策略。该控制策略通过建立弹体滚转角控制系统的数学模型,建立了以反作用飞轮角加速度为控制量输入,弹体滚转角为输出的系统扩张状态空间模型,进而建立了扩张状态观测器,并将观测器的观测值又作为已知模型信息,在控制器中对观测的干扰进行补偿。通过对收敛性与跟踪误差进行分析,证明了所设计的模型补偿自抗扰控制具有很好的收敛性与跟踪性能,能够实现对系统状态变量和扰动的无差估计。仿真实验和实物实验验证结果均表明,本控制策略减小了系统调节时间与稳态误差,大大增强了其抗扰能力与鲁棒性,在工程领域具有较高应用价值。
猜你喜欢
山西大同大学学报(自然科学版)(2022年4期)2022-08-29
兵器装备工程学报(2022年7期)2022-08-10
火力与指挥控制(2022年6期)2022-07-25
兵器装备工程学报(2022年4期)2022-05-09
爆炸与冲击(2022年2期)2022-03-17
计算机仿真(2021年3期)2021-11-17
兵工学报(2021年6期)2021-07-29
汽车实用技术(2021年6期)2021-04-07
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24