
4-PSPP六自由度并联机构的位置正反解
2021-03-16 09:39冯鑫
科技创新导报 2021年28期
冯鑫


摘要:针对求解传统并联机构位置正反解困难的问题,对一种新型4-PSPP并联机构,本文利用方向余弦阵法进行位置正反解。通过构建并联机构动平台的方向余弦阵,添加约束条件,得到解析解,并求得所有从动副的运动参数。利用MATLAB求解得到工作空间,图像结果显示符合给定的运动范围要求。该机构正解和反解的结果唯一,方便后续进行控制,具有良好的应用价值。
关键词:方向余弦阵法 位置正反解 六自由度并联机构 工作空间
Abstract: In view of the difficulty of solving the forward and inverse position solution of the traditional parallel mechanism, this paper uses the directional cosine matrix method to solve the forward and inverse position solution of a new 4-PSPP parallel mechanism. By constructing the directional cosine matrix of the parallel mechanism platform, adding constraints, the analytical solution is obtained, and the motion parameters of all driven pairs are obtained. The workspace is solved by MATLAB, and the image results show that it meets the requirements of the given motion range. The results of the forward and inverse solutions of the mechanism are unique, which is convenient for subsequent control and has good application value.
Key Words: Directional cosine matrix; Positive and negative position solutions; 6-DOF parallel mechanism; Working space
并联机构结构稳定、承载能力大[1],有着广泛的应用价值。周毅钧[2]对并联机构进行了工作空间和运动特性分析;米文博[3]用SolidWorks和Matlab联合仿真求出了并联机构的工作空间;朱旭彪[4]对2-PRU-UPR并联机构进行运动学分析及优化;申军伟[5]针对2自由度并联机构提出了一种新的轨迹规划方法;芦风林[6]设计了无耦合的并联机构,并进行了运动学分析。
为了探究输入件与输出件的几何关系,需要进行位置分析。与串联机构相比,并联机构结构更复杂,所以其位置分析要复杂很多。下面分别求解4-PSPP并联机构的位置正反解。
1 构型描述及符号说明
图1为该并联机构的结构简图。如图1所示,机构的固定平台和动平台的球铰点皆按四边形分布。首先,分别在机构固定平台和动平台中心建立一个坐标系(右手坐标系)。设四根丝杠A1B1、A2B2、A3B3和A4B4的长度为L1、L2、L3和L4,固定平台的外接圆半径为R。
为了后面方便进行公式推导,设支链上的移动副的位移量为qi。所有的移动副以沿着坐标轴正向的方向为正,反之为负。以图1机构的位置为初始位置,位移量均为零。设两球铰的距离为b,坐标原点离两球铰中心连线的距离为a,用cxi,cyi,czi表示位移量,x,y,z表示移动量的方向,L初始時b1b2的距离。
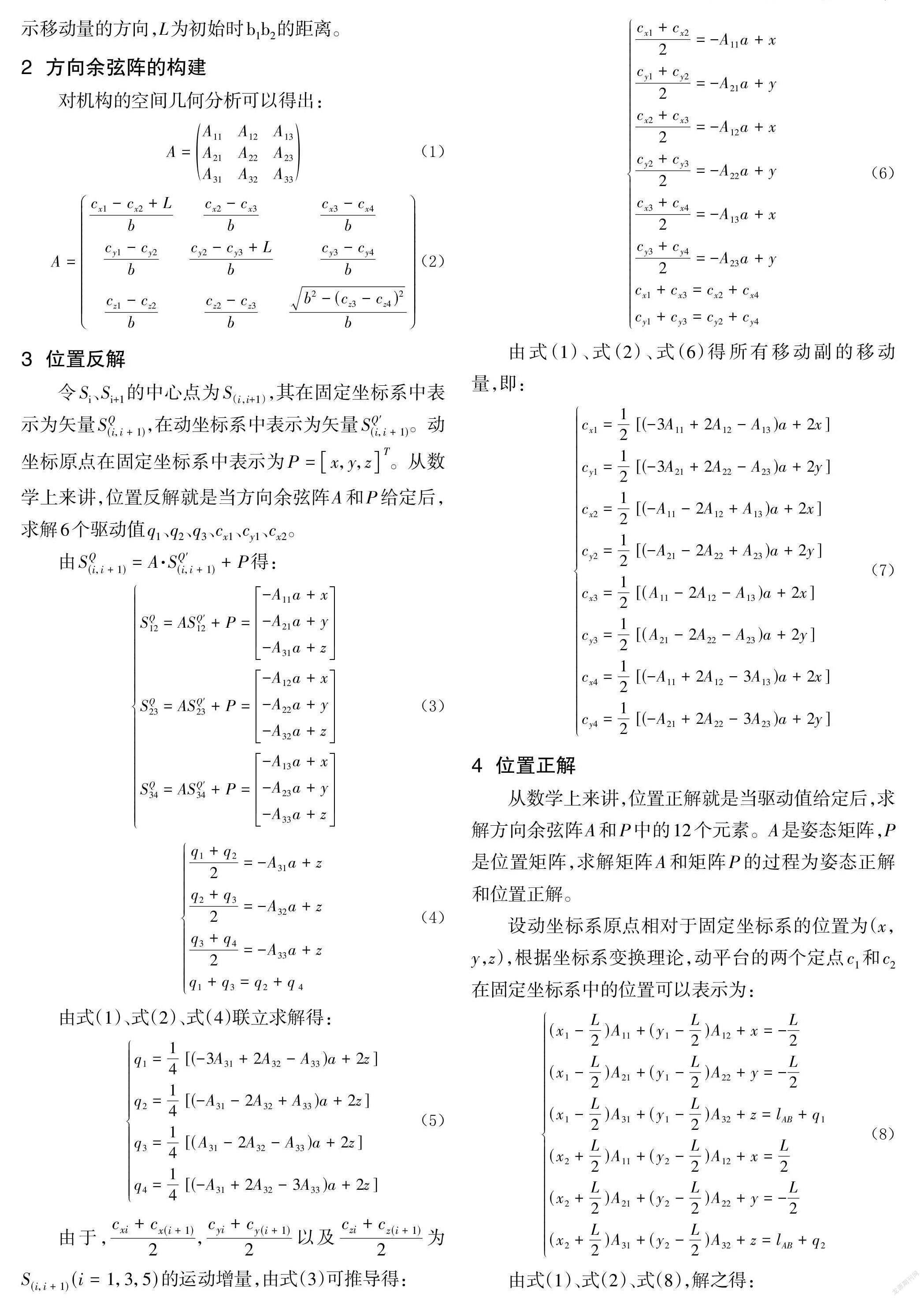
2 方向余弦阵的构建
对机构的空间几何分析可以得出:
5 结语
(1)使用方向余弦阵可以很方便的进行机构位置反解,可以求出所有运动副的位移量,有助于机构设计工作。
(2)4-PSPP型并联机构结构较为简单,位置正解和位置反解的结果都只有一个,给定驱动后运动确定,具有良好的应用价值。
参考文献
[1]文杰,马春生,刘建国,等.基于2-RCU/CUR并联机构的运动学分析[J/OL].包装工程:1-8[2021-11-04].
[2]周毅钧,陈业富,苏荣海.2RPU/2SPS并联机构工作空间及运动学分析[J].机床与液压,2020,48(21):26-30.
[3]米文博,马春生,李瑞琴,等.应用于药品包装生产线的2-UPR/RSPR并联机构的工作空间分析[J].包装工程,2021,42(03):171-176.
[4]朱旭彪.2-PRU-UPR并联机构运动学分析与优化设计[D].杭州:浙江理工大学,2018.
[5]申军伟,程珩.2自由度并联机构的运动轨迹规划优化[J].机械传动,2021,45(7):110-115.
[6]芦风林,张彦斌,王科明,等.新型无耦合两移动并联机构的设计与运动学分析[J].机械传动,2021,45(8):63-69.
3273500589229
