
移动场景下无线紫外光自动捕获对准跟踪系统
2021-03-17 07:41荆光瑞杨永坤白晓晨
科学技术创新 2021年5期
荆光瑞 杨永坤 白晓晨
(西安工程大学 电子信息学院,陕西 西安710048)
当前,紫外光通信已经成为光通信技术领域中的新型研究热点,日盲波段(200~280nm)紫外光因其保密性好,抗干扰能力强,可非直视通信等优点受到广泛的关注和重视[1~4]。
捕获、对准和跟踪(Acquisition, Pointing and Tracking,APT)技术是移动无线光通信的一个重要组成部分,能够用于光通信发射机和接收机的对准而获得直视光链路,是直视光通信系统有效运行所必需的。
2016 年,密歇根州立大学的Mohammed Al-Rubaiai[5]设计了根据信号强度控制旋转底座的动态对准系统,将数据丢失率从56.2%降低到9.9%。2017 年长春理工大学Ma Yanfang[6]比较分析了APT 系统计算精度时经常使用的质心法、霍夫变换法和圆拟合法等点检测方法,给出了每种算法的适用条件。2017 年北京航天工程学院Guo Aiyan[7]针对低地球轨道卫星间光通信的场景,研究了基于强度调制和直接检测的小型光终端无信标APT,并设计APT 程序。分析了视轴振动对采集时间和采集概率的影响,提出剩余不确定区域计算方法。2019 年,华中科技大学Cai Chengkun[8]提出由位置传感器控制压电驱动转向镜实现快速对准,其压电驱动频率可达2kHz,在每秒30 帧的图像观察中发现系统可以使光束中心位置的变化幅度由0.7mm 缩小到0.2mm。2019 年西北工业大学Li Qing[9]提出了由万向镜和压电快速转向镜组成的复合轴APT 系统,可以实现多个光轴的独立和同步控制,能够在复杂的机载环境下执行多目标APT。2019年美国林肯实验室Chang J[10]针对小卫星激光通信研究出了一种低复杂度APT 系统,该系统利用单个四单元光电探测器作为光学空间传感器,并利用航天器的身体指向能力来执行跟踪机动,避免了对额外专用光学硬件的需要。
目前的紫外光通信装置都是点对点的通信,移动场景下的紫外光通信的快速APT 比较困难,本文提出了一种移动场景下无线紫外光通信自动捕获对准跟踪算法,并基于ARM为核心的硬件处理电路,建立了紫外光通信系统,实验结果表明本算法能够实现快速的捕获对准跟踪,满足移动场景下的无线紫外光通信系统要求。
1 移动场景下无线紫外光通信捕获、对准、跟踪方法
1.1 紫外光移动自组网设计
主从节点间直视通信和非直视通信示意图如图1 所示,“×”表示紫外光发射器件,如紫外LED,“◦”表示紫外光光电转换器件,如光电倍增管。为了避免自身发射光信号对自身光电倍增管的干扰,LED 和光电倍增管呈90°正交布局。载有LED 和光电倍增管的四棱柱的中心轴固定在伺服电机的转轴上,由伺服电动机驱动。主节点的四棱柱顺时针旋转,从节点的四棱柱逆时针旋转且与主节点转速相同。当从节点光电倍增管在主节点LED 的发散角内时,可以实现主节点发,从节点收的紫外光直视通信,此时收发光椎的公共散射体如图1 中实线阴影面积所示。随时间推移,主从节点皆转过一定角度,从节点光电倍增管不在主节点的发散角照射范围内,此时可以实现主节点发,从节点收的紫外光非直视通信,非直视通信情况下收发光椎的公共散射体如图1 中虚线阴影面积所示。当收发节点都转动90°,同理可实现从节点发,主节点收的直视和非直视通信。

图1 主从节点间直视通信和非直视通信示意图
1.2 紫外光通信系统设计
通信节点系统组成如图2 所示,主要包括调制解调模块、发送模块、接收模块、伺服电机驱动模块、电源模块。
2 软件设计(图3)
2.1 捕获过程
在捕获的算法中,主节点保持每秒一圈的匀速转动,从节点则进行加速度为0.2 的加速运动,直至每秒两圈转动,再减速为每秒一圈的转动,在此过程中会有一个速度差,使得从节点能够接受到主节点发送的最大幅值信号,完成捕获。
2.2 对准过程

图2 通信节点系统框图

图3 捕获对准跟踪算法流程图
对准算法中,从节点把捕获过程接收到的最大幅值信号的幅值当做参考值,同样是在主从节点均旋转且移动的场景下。当从节点用单片机采集到的信号幅值再次达到这个最大参考值的大概90%时,则认为已经达到主从节点对准的条件了,于是从节点立即调用每秒一圈的电机匀速转动算法,即从节点就电机加减速转动变成了电机匀速转动,从而实现主从节点同速反向的直视通信
2.3 跟踪过程
在捕获、对准成功后,进入跟踪阶段。目前是主从节点电机同速反向旋转,且主从节点处于直视通信状态。在跟踪算法中,每圈调整1 次转速,以保证主从节点始终保持对准状态。调整方法为:检测电机本圈旋转中的信号幅度最大值与上一圈中的信号幅度最大值的关系,如果本圈与上一圈相比增大了,并且上一圈中是调用的电机微加速算法,那么本圈继续增加1 次转速,即继续调用电机微加速算法;如果本圈与上一圈相比减小了,并且上一圈中是调用的电机微加速算法,那么本圈就要减少1 次转速,即调用电机微减速算法,共有以下四种情况:

与上圈相比, 信号幅度增大 上一圈是增速 本圈继续增速 调用电机微加速算法 与上圈相比, 信号幅度增大 上一圈是减速 本圈继续减速 调用电机微减速算法 与上圈相比, 信号幅度减小 上一圈是增速 本圈减速 调用电机微减速算法 与上圈相比, 信号幅度减小 上一圈是减速 本圈增速 调用电机微加速算法
3 实验条件及结论
3.1 实验条件
为了验证基于ARM 的紫外光通信系统的整体运行性能,进行了一些相关性实验。实验地点为西安工程大学临潼校区电信学院前,时间为2020 年12 月20 日晚上07:00-10:00。实验过程中所测的温度为-4 度,风速为1 级,实验中通信距离为0~20m,间隔为5m,搭建的紫外光通信实验平台如图4、5 所示。

图4 发送端实物图
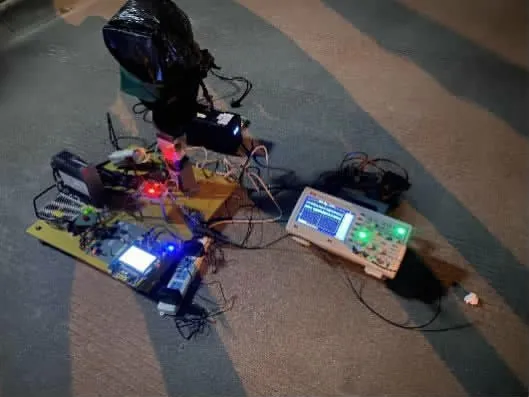
图5 接收端实物图

图6 距离对捕获时间的影响
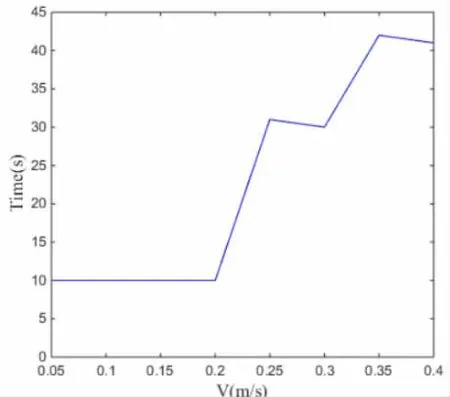
图7 速度对捕获时间的影响
3.2 实验结果及分析
在距离为5~10m 的时候,只需要经过一次就能捕获到信号,在10~15m 的时候,需要经过两次捕获,才能获得信号,超过15m 之后,需要三次才能稳定的接收到信号,具体如图6 所示。
在移动速度不超过0.2m/s 的时候,收端只需要一次即可捕获成功,在0.2~0.3m/s 的时候,需要两次才能捕获成功,如图7所示。
4 结论
紫外光通信技术因其具有保密性好、抗干扰能力强、可非直视等优点,被应用至无线通信无法触及的场合,例如军事和无人机编队飞行等领域。建立基于ARM的移动场景下无线紫外光通信系统,提出适用于移动场景下节点间捕获、对准、跟踪的算法,系统利用软硬件结合的方式设计完成,重点分析捕获时间与主从节点间移动速度和主从节点间间隔距离的关系,实验验结果表明,在15m 的距离内,移动速度不超过0.3m/s 时,该系统稳定性强,能快速实现主从节点任意相对位置和任意初始相位情况下的捕获、对准、跟踪。
猜你喜欢
电子工业专用设备(2022年1期)2022-07-13
疯狂英语·爱英语(2020年12期)2020-12-29
疯狂英语·爱英语(2020年12期)2020-12-29
导航定位与授时(2020年3期)2020-06-08
学苑创造·A版(2019年9期)2019-11-07
中学数学杂志(初中版)(2019年6期)2019-01-14
当代陕西(2018年12期)2018-08-04
优雅(2018年3期)2018-03-08
江苏农业科学(2017年13期)2017-09-28
中学物理·高中(2017年5期)2017-06-19
