
对地指向偏差为约束的卫星平稳对日定向方法
2021-03-26 04:01季浩然黄頔
北京航空航天大学学报 2021年2期
季浩然,黄頔
(1.武汉大学 遥感信息工程学院 宇航科学与技术研究院,武汉430072;2.国防科技大学 空天科学学院,长沙410073)
卫星在轨运行过程中,根据所执行任务的不同会采用不同的姿态模式,如地面目标凝视[1]、对空间目标指向[2]、对地定向[3]、对日定向[4]等。其中,对日定向是卫星常用的姿态控制任务模式之一[5],其通过设定卫星的期望姿态,使卫星太阳能电池阵平面充分对日以提供充足的能源。
然而,对日定向只限制了卫星姿态的2个自由度[6],因此,在卫星对日定向的同时,还可以利用卫星姿态的另一个自由度,设定适当约束以满足卫星其他组件、设备或载荷对卫星姿态的需求[7]。根据所附加约束的不同,对日定向又可以分为对日定向自旋稳定、以卫星速度方向偏差为约束的对日定向、以对空间目标指向偏差为约束的对日定向、以对地指向偏差为约束的对日定向等[8]。
其中,以对地指向偏差为约束的对日定向模式是一种较常见的卫星对日定向模式,其既能满足卫星对日定向的充电需求,又能保证天线、相机等重要组件具备指向地面或地表的工作条件[9-11]。
然而,传统的以对地指向偏差为约束的对日定向方法[12-15],要求卫星期望对日轴严格指向太阳方向,同时将期望对地轴置于日-地-卫星所确定的平面内且与卫星-地心连线方向的夹角最小。依据这样的传统方法,在卫星-太阳连线和卫星-地球连线达到极值的前后一段短时间内,卫星期望姿态会发生大幅度翻转。甚至当日-地-星共线时,还存在奇异现象。采用这种传统方法,卫星期望姿态不能平稳变化,不利于卫星姿态控制系统的安全稳定,亦使得姿态控制系统频繁高功耗工作,对卫星寿命产生损害。
为克服现有的同类方法将会导致卫星期望姿态在短时间内大幅度翻转的奇异现象,本文提出一种平稳的以对地指向偏差为约束的对日定向方法。其核心思路为:将卫星的期望姿态设置为绕一由卫星轨道决定的基准姿态周期性地旋转,该周期与日、地、星三者相对位置变化周期一致。首先,建立卫星的中间姿态,使得卫星的期望对地轴指向地心,卫星的期望对日轴指向轨道面法向或负法向,从而使得卫星的自由轴沿着卫星前进方向或其相反方向,且卫星的期望对地轴、期望对日轴与自由轴构成右手空间直角坐标系。其次,将卫星的中间姿态坐标系沿一欧拉轴旋转一个角度使得期望对日轴与太阳方向偏差减小,且保证期望对地轴与对地方向的夹角不大于约束角。本文方法大幅降低了卫星的峰值期望角速度和峰值能耗,提升了卫星以对地指向偏差为约束的对日定向方法的平稳性和可靠性。
1 对日定向方法
为提供一种平稳的卫星以对地指向偏差为约束的对日定向方法,克服现有的同类方法导致卫星期望姿态在短时间内大幅度翻转的奇异现象,本节分2步建立卫星对日定向时的期望姿态,如图1所示。

图1 对日定向期望姿态建立步骤Fig.1 Process of establishing expected Sun-pointing attitude
1.1 建立中间姿态
首先,依据卫星部组件布局,区分卫星的期望对地轴、期望对日轴和自由轴,同时依据任务需求设定约束角。其次,获取卫星当前轨道位置矢量、卫星瞬时轨道面法线方向单位向量和卫星-日心连线方向矢量,并求取卫星-地心连线方向矢量。最后,建立卫星的中间姿态,使得期望对地轴指向地心,期望对日轴平行于轨道面法向,从而使得自由轴沿着卫星前进方向或其相反方向。处于中间姿态时卫星的姿态如图2所示。

图2 卫星中间姿态示意图Fig.2 Schematic diagram of intermediate attitude of satellite
为便于描述,不妨以卫星本体坐标系-yb轴,即yb轴的反方向为期望对日轴,以卫星本体坐标系zb轴为期望对地轴。
特定任务中,要求卫星期望对地轴与卫星-地心连线的夹角小于一个约束角η。该约束角η表示期望对地轴和卫星-地心连线的偏差角(简称对地偏差角)的最大允许值,为一个约束变量。为使公式简洁,本文取η=90°。
假设某时刻卫星的轨道位置矢量为r,卫星瞬时轨道面法线方向单位向量为n,卫星-日心连线方向单位矢量为rs,进一步可求卫星-地心连线方向的单位矢量re为

将卫星处于中间姿态时的卫星本体坐标系记为B0,并在以后的叙述中简称为中间姿态B0,在B0坐标系下,设定卫星本体坐标系的轴与卫星-地心连线方向单位矢量re重合,卫星本体坐标系的轴位于轨道面负法向-n,而卫星本体坐标系的指向卫星的前进方向。
中间姿态下,卫星本体坐标系坐标轴在惯性坐标系下的方向为式中:下标i为在惯性坐标系下的分量。

此时,地心惯性坐标系I到描述中间姿态的B0坐标系的转换矩阵为

1.2 确定期望姿态
为缩小卫星期望对日轴(-yb轴)与卫星-日心连线方向的偏差角(简称对日偏差角),将B0进一步绕欧拉轴E旋转¯α角度,从而得到最终的期望姿态。记期望姿态下卫星本体坐标系为Bexp,下文简称期望姿态Bexp。由中间姿态旋转至期望姿态的过程如图3所示。

图3 卫星期望姿态示意图Fig.3 Schematic diagram of expected attitude of satellite
选取欧拉轴E,并计算欧拉轴E在B0坐标系下的投影E0。惯性坐标系I下欧拉轴E可由式(4)确定:

进而可计算得到B0坐标系下欧拉轴E的投影E0为

式中:下标0为在B0坐标系下的分量。
计算中间姿态下期望对日轴与卫星-日心连线方向的夹角,并定义为对日偏差角,即本文中-yb0轴与rs的夹角为α,则
为确保Bexp姿态下轴与re的夹角(以下简称对地偏差角)不大于给定的约束角η,一定情况下,欧拉角需小于某一旋转约束角β。所述旋转约束角β为当中间姿态绕欧拉轴旋转而导致期望对地轴与卫星-地心连线的角度恰等于约束角时,中间姿态绕欧拉轴所转过的角度。在本文中,当与的夹角恰好等于约束角η时,B0绕欧拉轴E转过的角度即为β。

在坐标系B0下,λ的值由式(8)可得

根据几何关系,旋转约束角β可以由夹角λ和约束角η唯一确定。注意到,本文中η取为直角,运用余弦定理,易得本文中旋转约束角β简化为

绕欧拉轴E旋转的欧拉角α¯的确定原则如下:当卫星中间姿态绕欧拉轴进行任意旋转,对地偏差角均不会大于约束角时,旋转约束角无解,此时,旋转角度取式(6)所确定的中间姿态下的对日偏差角;当卫星中间姿态绕欧拉轴进行旋转,存在对地偏差角大于约束角的情形时,旋转约束角有解,此时,旋转角度取中间姿态下的对日偏差角α与式(9)确定的旋转约束角β中的较小值。


实际应用中,约束角的取值应综合考虑相机视场角、天线波束角等约束,并利用球面三角公式对式(9)重新求解。作为对比,传统方法虽然没有约束角的概念,其实际对地偏差极大值为90°并且无法人为减小。约束角的取值可以自定义亦是本文方法的优势之一。

根据四元数的性质,直接得到B0坐标系转至Bexp坐标系的转换矩阵为

由此得到由惯性坐标系I转换至期望姿态坐标系Bexp的转换矩阵为

因此,期望姿态坐标系Bexp在惯性坐标系I下的空间指向可以由式(13)确定。也可以说,由惯性坐标系I至期望姿态下卫星本体坐标系Bexp的转换矩阵唯一确定了卫星期望姿态在惯性坐标系下的描述。
2 数值仿真
2.1 平稳对日定向方法
依据本文所提出的对日定向方法,在J2轨道动力学仿真条件下进行仿真。设定航天器位于485 km高度的35°倾角LEO轨道。为充分检验本文对日定向方法的有效性,将仿真场景时间设为2019年1月1日至2020年7月1日,共计1.5年。得到计算结果如图4~图9所示。
图4为1.5年的仿真时间段内,卫星期望对地轴与实际卫星-地心连线方向的夹角变化。可知,采用本文对日定向方法,卫星对地偏差角被有效限制在90°约束角范围以内。
图5为1.5年的仿真时间段内,卫星期望对日轴与实际卫星-日心连线方向的夹角变化。可知,采用本文对日定向方法,会部分牺牲卫星对日定向的效能,即存在对日偏差角不为零的情况,卫星对日偏差角峰值约为57°。
为进一步考察采用本文平稳对日定向方法后,卫星对日定向的效能损失,截取图5中2019年1月22日0:00~6:00的一段非零对日偏差角密集区局部放大,对日偏差角的变化规律如图6所示。

图4 对地偏差角在1.5年时间内的变化规律Fig.4 Development of deviation of Earth-pointing within 1.5 years

图5 对日偏差角在1.5年时间内的变化规律Fig.5 Development of deviation of Sun-pointing within 1.5 years
在图6所示仿真时段中,对日偏差角为零的时段约占整个仿真时段的55%,而对日偏差角的峰值约为54°。综合图5~图6所示对日偏差角变化规律可以发现,采用本文以对地指向偏差为约束的卫星平稳对日定向方法后,卫星对日偏差角被较好地控制,期望对日轴在多数时间能够严格地对日定向。
采用本文提出的平稳对日定向策略后,卫星在1.5年内的期望角速度变化如图7~图9所示。卫星期望角速度平稳变化,x方向和z方向的角速度最大值不超过0.3(°)/s,y方向的角速度稳定在0.065(°)/s,y方向的角速度与卫星轨道角速度保持一致。
对比图5和图7~图9可以发现,卫星期望角速度的变化规律与对日偏差角的变化规律同步,即当对日偏差角的局部极值越大时,卫星期望角速度的局部极值也越大。而当卫星对日偏差角在一段连续时间内能够保持为零时,航天器在该段区间内的期望角速度亦保持为低值,仅需绕y方向保持低速自旋,自旋周期与轨道周期一致。

图6 连续6小时内对日偏差角的变化规律(2019年1月22日)Fig.6 Development of deviation of Sun-pointing within consecutive 6 hours(2019-01-22)

图7 依据期望姿态差分得到的卫星x轴角速度Fig.7 Angular velocity in x-axis obtained by difference of expected attitude

图8 依据期望姿态差分得到的卫星y轴角速度Fig.8 Angular velocity in y-axis obtained by difference of expected attitude
2.2 传统对日定向方法
为了更好地说明传统对日定向方法导致的期望姿态短时间内大角度翻转的奇异现象及其机理,采取同样的仿真条件,采用传统的对日定向方法进行仿真。依据传统对日定向方法,设定卫星-yb轴严格指向太阳的同时,zb轴与卫星-地心连线方向的夹角最小,zb轴位于星-地连线与对日方向共同确定的平面上。
图10给出了1.5年的仿真时间段内卫星-地心连线和卫星-日心连线的夹角往复变化。可以看出,图中频繁出现了接近零或180°的奇异区间。这种奇异区的存在,将导致期望姿态在短时间内大幅度变化,从而导致卫星期望角速度过大。如图11所示,如果采用传统的对日定向方法,卫星期望角速度在奇异区出现突变,其峰值大于15(°)/s,不利于卫星节能和安全防护。
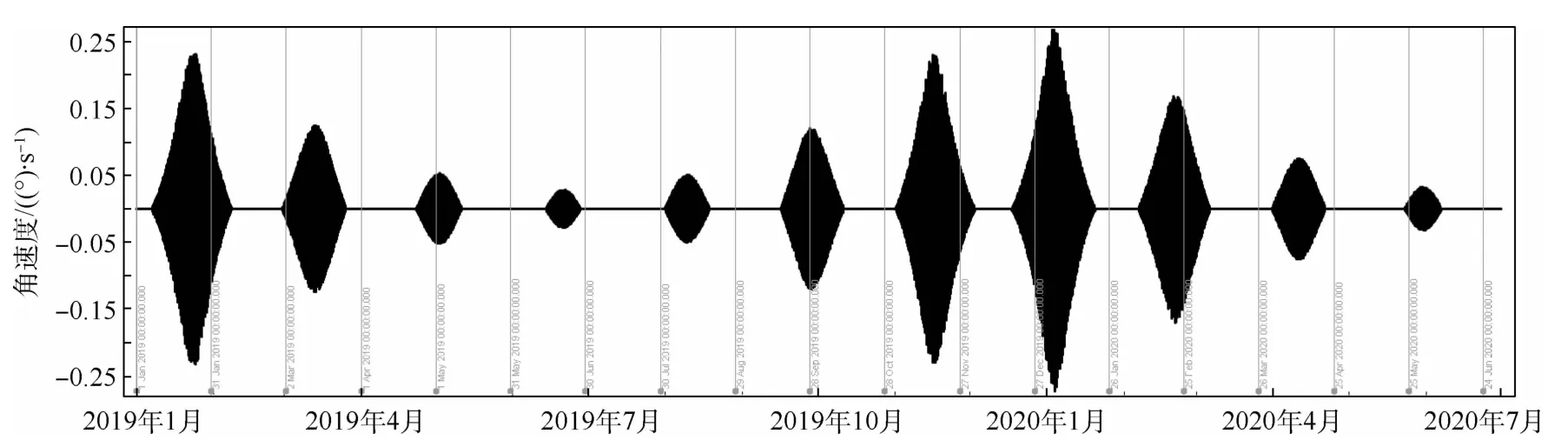
图9 依据期望姿态差分得到的卫星z轴角速度Fig.9 Angular velocity in z-axis obtained by difference of expected attitude

图10 卫星-地心连线和卫星-日心连线夹角的变化规律Fig.10 Development of included angle between the satellite-Earth vector and the satellite-sun vector

图11 传统对日定向方法在1.5年时间内对期望姿态差分得到的角速度Fig.11 Angular velocity obtained by difference of traditional expected attitude with 1.5 years
3 结束语
本文提出了一种卫星平稳对日定向方法。由于采用了中间姿态过渡,卫星期望姿态和期望角速度得以平稳变化,在不显著牺牲卫星对日定向效能的前提下,克服了卫星期望姿态快速翻转的奇异现象,并且能够严格确保对地偏差角小于所设计的约束角,大幅降低了卫星的峰值期望角速度和峰值能耗,提升了卫星以对地指向偏差为约束的对日定向方法的平稳性和可靠性。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
语数外学习·高中版中旬(2021年11期)2021-02-14
金桥(2020年11期)2020-12-14
中学课程辅导·教师通讯(2018年10期)2018-09-04
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中学生数理化·高一版(2017年3期)2017-07-08
小学阅读指南·低年级版(2016年3期)2016-05-27
