
基于寒鸦配对交互行为的无人机集群编队控制
2021-03-26 04:01张令段海滨雍婷邓亦敏魏晨
北京航空航天大学学报 2021年2期
张令,段海滨,*,雍婷,邓亦敏,魏晨
(1.北京航空航天大学 自动化科学与电气工程学院 飞行器控制一体化技术重点实验室 仿生自主飞行系统研究组,北京100083;2.鹏城实验室,深圳518000; 3.信息系统安全技术重点实验室,北京100101)
无人机(Unmanned Aerial Vehicle,UAV)具有风险小、成本低、环境适应力强等优点,在民用和军事任务中的应用越来越多。单个无人机由于自身资源有限,无法执行大规模任务,为适应新的任务需求,多无人机集群逐渐成为无人机领域的研究热点。多机相互协作,可实现单机资源的充分利用,完成更为复杂的任务[1]。何吕龙等[2]设计分布式控制协议,解决了有向通信拓扑和时延条件下的无人机集群时变编队控制问题;马鸣宇等[3]采用事件驱动控制方法,实现了多无人机系统的协同控制;Rosa等[4]通过滚动时域控制方法,实现了无人机复杂队形的控制与保持。
无人机集群控制与生物群体智能行为存在相似性,生物群体通过简单的局部交互规则,可实现有序协调的集群运动,胜任远超个体能力的复杂任务。将生物智能和仿生科学的研究成果应用于无人机,是提升无人机集群技术的重要思路,并且生物集群理论在多机器人系统中的应用已经逐渐成熟[5-7]。将生物群体智能映射于无人机集群控制,需要先建立集群模型,通过具有简单交互规则的模型,重现生物的复杂群体行为[8],再将模型的交互和运动决策规则与无人机控制系统结合,在无人机上实现模型的控制方案。
目前,集群建模的研究重心在个体运动决策上,即在个体的交互邻居集合已知后,研究如何根据个体自身和邻居的交互信息,进行下一时刻的运动决策,而对个体间的交互机制研究较少[9]。
生物群体的交互机制主要分为分层领导交互模式和固定邻居距离交互模式[10]。Couzin模型[11]和Vicsek模型[12]都采用固定邻居距离交互模式,个体一定距离内的所有邻居都是其交互对象。固定邻居距离交互模式有很强的环境适应性,缺点是通信量较大。邱华鑫等[13-14]通过模仿鸽群层级机制,提出了一种基于鸽群行为的多无人机集群控制模型,实现了无人机间交互模式的切换并完成同步性分析。分层领导交互模式的通信量更小,但是面对部分个体通信丢失等复杂情况缺乏适应性。
Ballerini等[15]发现,椋鸟只与其距离最近的6~7个邻居进行交互,并且交互对象数量稳定,不受个体间距影响,称之为拓扑交互(Topological Interactions)现象。拓扑交互机制已经过理论证明[16],并在鱼群实验中[17-18]得到验证。在通信负载方面,拓扑交互的个体邻居数量远小于固定邻居距离交互的数量。Ling等[19-20]在对寒鸦群的观测中发现,寒鸦群由于一夫一妻制形成特有的交互模式,群体中有15% ~70%的个体一对一配对飞行,称之为配对交互。没有配对的寒鸦使用拓扑交互,交互范围为7~8个;配对寒鸦在其一侧只与配对对象交互,另一侧则采用拓扑交互,交互范围约为非配对个体的一半,减小2~3个交互对象,因此配对交互的通信量较拓扑交互更少。观测数据证明,配对交互模式也减小了寒鸦的飞行能量消耗。
本文通过模仿寒鸦的配对交互机制,提出了一种基于寒鸦配对交互行为的集群编队控制模型,对于集群中的配对个体和未配对个体,分别研究其交互运动特性,将所提模型映射于无人机集群编队控制。实验结果表明,配对交互模型的应激能力更强,而且合适的配对比例能在保证无人机集群聚集性的同时,显著减小机间通信负载。
1 寒鸦配对交互行为机制建模
1.1 配对交互邻居选择机制
在寒鸦群中,未配对的个体采用拓扑交互。为表示拓扑交互作用,寒鸦个体采用固定邻居距离交互模式,将交互距离Ri以内的个体作为其邻居,并对Ri作动态调整[21],使交互邻居数量基本保持在期望值。寒鸦个体交互邻居的集合为

式中:dij(t)为个体i与个体j的实际距离;N为寒鸦群数量;交互距离不大于感知半径,即Ri(t)≤Rsen。
交互距离调整规则[21]为



式中:αi(t)为个体i当前速度方向;xi(t)、yi(t)和xj(t)、yj(t)分别为个体i和个体j的位置坐标。
1.2 基于社会力的集群动力学模型
1.2.1 社会力框架
考虑个体数量为N的集群系统,在三维无障碍空间运动,个体i的位置向量为xi∈R3,速度向量为vi∈R3,不考虑个体形状,其质量为mi。参考文献[13],寒鸦个体的运动微分方程描述如下:


个体i受到个体j的位置协同力和速度协同力分别为

式中:xij表示由个体i指向个体j的单位向量;dexp为个体间期望距离;λ为位置协同力随个体间距的衰减系数;kpos为位置协同系数;kvel为速度协同系数。
1.2.2 未配对寒鸦的协同力
与未配对寒鸦个体交互的每一个邻居的地位都相同,所以其位置协同力和速度协同力取各个邻居的均值:

1.2.3 配对寒鸦的协同力
配对寒鸦在其一侧只与配对对象交互,故先将另一侧的位置和速度协同力取均值,再与其配对对象的加权求和。


2 无人机集群控制
2.1 无人机模型
假定固定翼无人机配置有速度、航向角和高度3个回路的自驾仪,则无人机模型[23]可简化为

式中:vc、hc和χc分别为水平速度、高度和航向角控制输入指令;(x,y,h,v,χ,)为无人机的6个状态值,分别表示无人机三轴位置、水平速度、航向角和高度变化率;αχ、αv、和αh为自驾仪控制参数。
考虑无人机的飞行限制条件:

式中:vmin>0和vmax>0分别为无人机最小航速和最大航速;ωmax>0为无人机最大航向角速度的绝对值。
2.2 集群动力学模型与无人机模型的映射关系
式(5)计算所得的集群控制量ui通过指令解算[13],可得到无人机的自驾仪控制输入:


无人机模型的状态输出值可转换为无人机的位置和速度向量,作为集群动力学模型的输入:

3 仿真结果分析
3.1 集群运动评价指标
3.1.1 序参量
通常使用序参量(Order Parameters)来描述集群运动的有序性,该方法由Vicsek等[12]提出,本文采用极化指数作为序参量。极化指数刻画集群中所有无人机运动方向趋于一致的程度,极化指数φ∈[0,1]越大,则集群运动的一致性程度越高,设定极化指数阈值φflock,当极化指数大于φflock,则认为集群的有序性良好。

式中:N 为集群无人机数量;vi为无人机i的速度。
3.1.2 尺度指数
尺度指数为所有无人机到集群中心点距离的平均值,表示集群的聚集程度,尺度指数越小,聚集程度越高,定义如下:

3.1.3 通信负载
通信负载Nnb(t)定义为时刻t集群无人机的平均邻居数量,平均数量越小,则通信负载越小。

式中:Ni(t)为t时刻无人机i的交互邻居数量。
3.1.4 应激精度
应激精度δ表示在刺激后集群运动方向与刺激方向的接近程度,δ=0表示刺激后所有集群无人机均未改变运动方向,δ=1表示集群无人机已经与刺激方向一致。对于单向刺激,定义如下:

式中:qi为无人机i的单位化速度向量,表示运动方向;qsti为刺激方向;q0为刺激之前集群的运动方向,qsti和q0均为单位向量。
3.2 集群参数设置
集群参数设置如表1所示。

表1 集群参数设置Table 1 Swarm parameter setting
3.3 仿真分析
3.3.1 配对比例
设定每次仿真时间50 s,步长0.05 s。其他参数保持不变时,通过改变集群中配对无人机的比例ppair,研究其对集群性能的影响。配对比例表示配对无人机数量与集群数量的比值,集群数量取10,配对比例ppair分别取值0、20%、40%、60%、80%、100%。配对比例为0、40%和80%的三维轨迹曲线如图1所示,图2~图4分别为集群的极化指数、尺度指数和平均邻居数量随时间的演化曲线。

图1 不同配对比例时的三维轨迹曲线Fig.1 3D trajectory curves changing with pairing ratio

图2 极化指数随配对比例变化曲线Fig.2 Curves of polarization exponent changing with pairing ratio
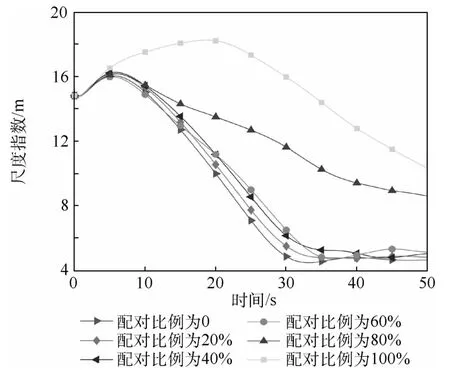
图3 尺度指数随配对比例变化曲线Fig.3 Curves of scale exponent changing with pairing ratio
极化指数图中,虚线为极化指数阈值。配对比例从0变化到100%,逐渐增大,不同配对比例下的序参量演化曲线重合,在1.95 s时超过阈值并稳定在阈值以上。尺度指数图中,配对比例为0、20%、40%、60%的尺度指数变化趋势一致,最终稳定在5 m附近,而配对比例为80%和100%的尺度指数较大,在50 s时其值分别为8.6m和10.4m。平均邻居数量图中,配对比例每增大20%,平均邻居数量约减小1个,集群的通信负载随配对比例增大显著减小。由仿真结果可见,配对比例越高,集群通信负载越小,合适的配对比例能保证集群的一致性和聚集性,当配对比例超过一定阈值时,集群的尺度指数增大,聚集性降低。分析原因是:未配对无人机的交互邻居多,交互范围大,能减小集群的尺度指数,而高配对比例导致无人机的交互邻居数量减小,使集群的聚集性下降。保证聚集性的配对比例阈值应在60% ~80%之间,仿真结果也符合寒鸦飞行时维持15% ~70%配对比例的观测结论。

图4 平均邻居数量随配对比例变化曲线Fig.4 Curves of average number of neighbors changing with pairing ratio
3.3.2 应激响应特性
研究集群对于单向刺激的响应特性,设定集群中部分无人机在某时刻改变其运动方向且固定,其他参数保持不变时,分析信息无人机占比对应激精度的影响,给出定义如下:信息无人机占比为改变运动方向的无人机数与集群无人机总数比值。
设定每次仿真时间100 s,步长0.05 s。集群数量取10,信息无人机在t=15 s时航向角减小30°,进行2次不同的仿真:信息无人机占比分别为10%、20%,每次仿真进行配对比例0和40%的对比,其中配对比例为40%时,信息无人机均为配对无人机。信息无人机占比为10%的三维轨迹曲线和应激精度随时间演化曲线如图5和图6所示,信息无人机占比为20%时如图7和图8所示。
由图5可见,信息无人机占比10%时,配对比例为40%的集群对刺激响应更明显。信息无人机i对其配对对象j的协同力较大,使得j向i靠近和速度匹配的趋势比其他无人机更大。在其他无人机和i的协同力的共同作用下,j的位置和速度方向都处于i与其他无人机之间,这也使其他无人机的运动方向更加接近信息无人机,形成更大的应激精度。

图5 不同配对比例时10%信息无人机占比三维轨迹曲线Fig.5 3D trajectory curves changing with pairing ratio with information UAV ratio of 10%

图6 10%信息无人机占比下应激精度随配对比例变化曲线Fig.6 Curves of stimulation accuracy changing with pairing ratio with information UAV ratio of 10%

图7 不同配对比例时20%信息无人机占比三维轨迹曲线Fig.7 3D trajectory curves changing with pairing ratio with information UAV ratio of 20%

图8 20%信息无人机占比下应激精度随配对比例变化曲线Fig.8 Curves of stimulation accuracy changing with pairing ratio with information UAV ratio of 20%
信息无人机占比为20%时,配对比例为0的集群的应激精度在刺激初期缓慢增加,随着信息无人机与其他无人机的距离增大,其协同力逐渐消失,应激精度最终稳定为0.3;而配对比例为40%时,集群的应激精度远大于配对比例为0,在100 s时,集群的运动方向已基本和信息无人机一致。可见当信息无人机中存在配对无人机时,集群的应激精度更高。
4 结 论
针对多无人机集群控制问题,受寒鸦群配对飞行行为机制的启发,本文提出了一种配对交互模型,通过一定比例的无人机配对,减小集群无人机的交互邻居数量,从而减小通信负载。
1)通过2组仿真实验研究所提模型的特性,验证了集群的配对比例越高,其通信负载越小,但是需要控制合适的配对比例,以保证集群的一致性和聚集性,配对比例的上限应在60% ~80%之间。
2)对于单向刺激,当信息无人机中有配对无人机时,集群更容易对刺激做出响应,应激精度更高。
猜你喜欢
出版人(2022年8期)2022-08-23
农业工程学报(2022年11期)2022-08-22
家教世界·创新阅读(2019年6期)2019-06-25
阅读与作文(小学高年级版)(2017年8期)2017-08-04
知识就是力量(2017年2期)2017-01-21
Coco薇(2015年10期)2015-10-19
小学阅读指南·低年级版(2015年9期)2015-09-10
时尚内衣(2013年4期)2013-06-18
中学生数理化·高二版(2008年11期)2008-06-17
