农机导航自校正模型控制方法探讨
2021-04-01 01:47宋龙志
农机使用与维修 2021年3期
宋龙志
(黑龙江省农业机械工程科学研究院,哈尔滨 150081)
0 引言
为了提升农机导航管控精度与可靠性,很多专家对导航管控模式实施了大规模的研究。管控模式的研讨不但在以往的PID管控模式层面,模型管控模式与模糊管控模式也转变为诸多专家完成导航管控模式的核心趋势。因为农业设备的作业环境不佳,轮毂与地表作用流程繁杂,构建精准的数学模型难度不小,已有的多类模型管控模式所使用的模型通常基于在既定类似假定条件构建的运动学模型。模型管控模式的优势为在可取得精确模型的管控层面,管控特性较为优良;缺陷是对模型的精准度要求很高,不精准的数学模型会给管控模型的管控质量造成负面效应,所以如何解决这类问题成为智能操作行业中的一大课题。
1 当代农机自动导航系统的经典结构
农机的自动导航管控通常是对农机实施横向方位的管控,即管控农机最终预先确定好的工作路径,让其与路径间的横向方位误差维持在允许的精度范畴以内,进而满足农业生产的需求。当代农机自动导航系统通常由管控单元、测试单元、执行单元与监督单元四大单元组成。
测试单元功能是对目前方位与工况的测试,当中的传感设备一般包含方位传感设备、姿态传感设备、速率传感设备等,用来测试农机目前的方位、姿态角讯息与方位、姿态角的改变速率,也就是说农机运转速率与运转角速率等;轮毂转角传感设备用来检测农机转向轮目前转向视角讯息,用以转向管控回路的回馈传感设备。
管控单元是导航体系的中心,要完成导航途径设计与路径追踪管控。当中,导航管控设备依照农机的当前方位讯息与目标路径讯息,依照某类导航管控方略,运算出转向视角的期待值,也就是转向角命令;转向管控设备依照农机目前的转向角与来源于导航管控器的转向角命令,根据某类转向管控方略,运算出对转向执行机构的管控量,例如频次、电压等,进而管控转向执行机构的转动,把农机转向轮运转到转向角命令需要的视角。
执行单元是农机转向的执行单元,其功能是把转向管控设备的管控讯号转变成对农机转向轮的转向力矩,让转向轮开始工作。监督单元是导航体系的人机互动界面,通常由一部田间电脑完成。田间电脑的核心功能包含体系数据设置、导航任务管控、导航工况监督等。
2 农机导航自校正模型管控简述
农机导航自校正模型管控设备由模型管控设备与自校正管控设备两大版块构成(图1)。
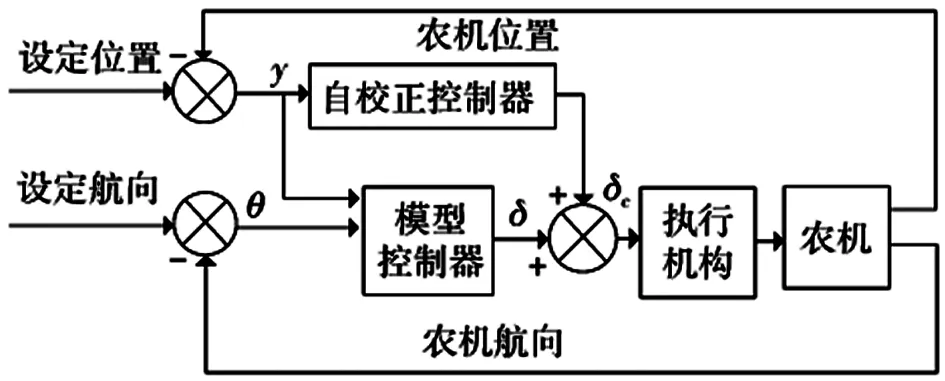
图1 管控框图
模型管控器是主管控设备,鉴于非线性运动学模型创设了可靠的控制律,鉴于目前的方位讯息运算管控量转向轮期待转角δ,并将其输出到执行部门,管控农机让其根据预设路径运动。自校正管控设备作为辅助管控设备,使用模糊管控模式,基于驾驶员经验创设模糊管控准则,校正模型管控其管控量是δ。因为模型管控设备创设所依靠的运动学模型仅是农机运转状况的类似反应,模型管控设备的管控成效与预计有所出入,自校正管控设备引进一段时期后横向误差的改变态势sdy可以监督模型管控设备的管控成效,并实时运算转向轮期待补偿角δ,修正模型管控器管控量δ。自校正模型管控既预留了模型管控模式在导航管控中的功能,又缩减了不精确模型给导航管控质量带去的负面效应,提升了导航管控精度。
3 自校正模型管控设备设计
此处,本文探讨的是农机运动学模型。在不权衡轮毂与地表的互为影响,且没有侧偏俯仰、滑移等现象的状况下,要把农用拖拉机、联合收割机、插秧设备等多类四轮农机当成二轮车模型完成运动学解析。
模型管控设备在直线路径与小曲率途径追踪阶段的最终成效最佳,但是在大曲率途径追踪阶段最终成效与预计的追踪效果有所差别。所以,能够通过监督检测模型管控设备管控成效与预计成效的契合度来考评模型管控设备的管控成效。因此,引进近期Δt内误差改变态势变量sdy当成契合度数据
Δt必须通过经验来选择,假如Δt的数据极小,自校正管控设备的反映速率极快,然而系统的可靠性不佳;假如Δt的数据很大,自校正管控设备的反映速率会相对慢一点,然而系统的可靠性有所保障。通过反复验证,数据Δt是1.2 s。
3.1 输入输出变量的模糊化
自校正管控设备包含两大输入变量,横向误差变量y与改变态势变量sdy。输出变量是转向轮期待补偿角δ。模糊化阶段通常要完成用数字表示的输入量转变为一般用语言数据表示的某个模糊化级别的序数。
3.2 管控准则库设计
依照驾驶者的具体驾车经验,自校正管控设备的设计准则是:误差绝对值很大时,管控量尽可能缩减误差;误差绝对值很小时,除要权衡到缩减误差外,还应兼顾系统可靠性的情况。假如偏差绝对数据的改变态势变大,自校正管控设备要输出转向轮期待补偿角校正模型管控设备输出,让农机向误差缩小的方位移动;假如偏差绝对数据的改变态势变小,表示此时的管控成效与起到管控成效基本契合,自校正管控设备输出的管控量要小视角调试或不调试模型管控设备的输出(图2)。
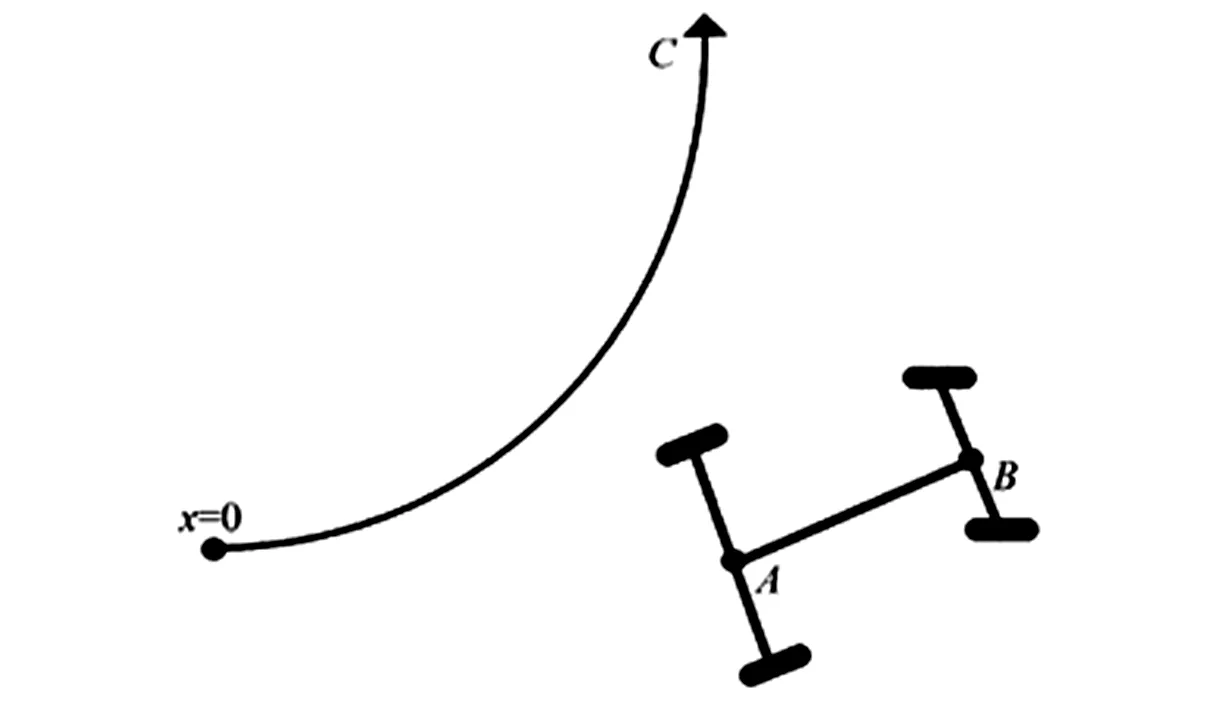
图2 车体与导航线方位关系图
图2说明,车身在导航线的右端,横向误差是最大负值,并且有持续负增加的态势。这和期待的模型管控设备管控成效不吻合,自校正管控设备要输出正的转向轮期待补偿角的峰值以校正转向轮期待转角,让车体往导航线方位移动。
4 结语
综上所述,本文给出了自校正模型管控模式,以模型管控设备为主管控设备,自校正管控设备为辅助管控设备。主管控设备使用渐进可靠的管控律运算管控量,管控农机根据设计路线运动,自校正管控设备实施监督管控模式的管控成效,依照驾驶者经验自动调试模型管控模式,提升了农机导航管控系统的管控精度与可靠性。
猜你喜欢
四川农业与农机(2022年4期)2022-08-31
今日农业(2021年4期)2021-11-27
幼儿园(2021年12期)2021-11-06
国学(2020年1期)2020-06-29
中国化肥信息(2019年5期)2019-06-25
数学物理学报(2017年6期)2018-01-22
摄影之友(影像视觉)(2017年1期)2017-07-18
中国修辞(2016年0期)2016-03-20
幼儿100(2016年28期)2016-02-28
火控雷达技术(2016年2期)2016-02-06