机械臂技术的研究现状及其典型应用分析
2021-04-01 01:47程智超王云汉孙浩天贾文哲
农机使用与维修 2021年3期
程智超,王云汉,孙浩天,贾文哲,李 锟
(1.长春工程学院,长春 130000;2.长春建工集团吉泓建筑有限公司,长春 130000)
0 引言
随着科技的快速发展,德国工业4.0以及中国制造2025规划的出现,着重强调发展先进的机械技术。中国制造2025规划中强调重点发展高档数控机床、机械臂及高技术船舶、先进轨道交通装备、农业机械装备等多个领域,以提高制造业的水平。机械臂作为当今科研领域研究的一个热点,其技术及应用应进一步得到优化和普及。机械臂因其效率高、稳定性好、恶劣环境适应性强等优点,在工业、农业等许多领域已经转化为生产力为社会发展做出贡献。然而传统机械臂也存在自主性差、兼容性低等缺点,其多数应用在固定参数、流程甚至是固定运动轨迹的工作条件中,即使流程或工作对象发生细小改变也需要对作业系统和机械臂运动参数进行重新设定,因此,机械臂的技术升级工作和智能化研究是近年来的热点问题。
1 国内机械臂市场分析
根据智研咨询发布的《2020—2026年中国工业机械臂行业市场调研及投资方向研究报告》数据显示:2017年我国机械臂市场规模为150.43亿元,2018年我国机械臂市场规模为149.19亿元。其中国产品牌市场规模从2014年的6.51亿元增长至2018年的22.83亿元;国外品牌市场规模从2014年的72.45亿元增长至2018年的126.36亿元,如图1所示。

图1 2014—2018年我国机械臂市场规模(亿元)
图2为2014—2018年我国机械臂市场销量及国产品牌销量对比,可见2014年我国机械臂产品销量为3.60万台,其中国产品牌销量为0.36万台,国产品牌占比为10.00%;到2018年我国机械臂销量增长至9.72万台,其中国产品牌销量增长至1.88万台,国产品牌占比从2014年的10.00%增长至2018年的19.34%。东部地区是我国工业机械臂主要生产区。主要分布在国内东部地区,东北和华东、华南是主要机械臂生产基地。由此看出,我国十分重视机械臂的发展前景,没有国内自主研发机械臂,就没有其为各个行业提供设备,不会有国民经济及生产能力的进一步发展。
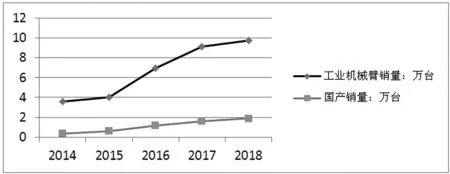
图2 2014—2018年我国机械臂销量及国产品牌占比
2 国内机械臂技术研究与应用情况
近年来,我国自主机械臂技术水平和应用能力得到显著提升,例如越疆科技刘培超及团队,凭借 “Dobot机械臂”项目,夺得中美创新创业大赛的二等奖,他的创立目标是制造一个价格低廉、操作精准的机械臂,供教育科研以及相关领域使用。关键技术的攻克历经了将近3个月的时间,同时设计了7种控制方法。PC鼠标端、手机APP、脑电波控制、语音控制、手势传感器、体感控制、视觉识别,使得Dobot的使用方式更加符合人性,增加用户好感。它能写出漂亮的毛笔字和英文,能画画、切香肠,端水也不会洒出来,还可以搬运小小的螺丝钉,甚至还可以打字和3D打印,Dobot机械臂如图3所示。
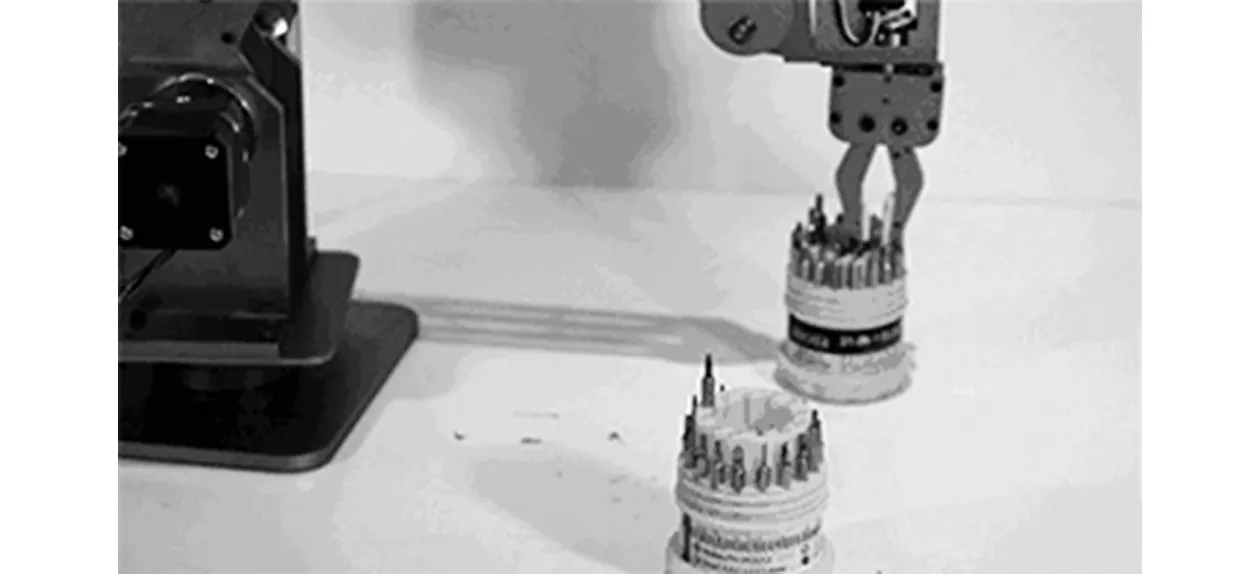
图3 Dobot机械臂
现阶段的机械臂产品广泛应用于各种场合,但这种工作方式多数只能按照事先设置的位置进行重复的动作,无法感知周围环境,其应用范围因此受到一定的限制。我国机械臂多数应用在生产线上,这类机械臂主要工作于原料搬运、喷漆、焊接等工作场合,在应用方面,在第二汽车厂建立的我国第一条采用国产机械手的生产线——东风系列驾驶室多品种混流机械手喷涂生产线,该线由7台国产PJ系列喷涂机械手和PM系列喷涂机械手和周边设备构成,已运行10年,完成喷涂20万辆东风系列驾驶室的生产任务,成为国产机械手应用的一个窗口。
红旗轿车在引进消化先进技术的基础上,为了配合红旗轿车焊装生产线的设计与实施,一汽集团与沈阳自动化所等单位联合开发了120 kg点焊机器人。红旗轿车焊装生产线共装备了6台120 kg点焊机器人,提高了生产率,保证了生产质量。其中,一汽“红旗”汽车机器人焊接生产线如图4所示。

图4 一汽“红旗”汽车机器人焊接生产线
国内工业机械臂的发展十分迅速,政府颁布的政策支持也起到了很大的帮助作用。政府相继颁布了《中国制造2020》《十三五规划》和《机器人产业发展规划(2016—2020年)》等政策扶持机器人产业的发展。有了政策支持,再加上机械臂的产品优势和广阔的市场需求,工业机械臂在国内的发展前景不可估量。
与传统的机械臂相比,我国自主研究的桌面机械臂具有成本低、重量轻、占地面积小等突出优点。通过实验证明,运用 Faster R-CNN 神经网络比单纯用 Open CV 做图像识别,准确率有明显提升。但其工作性能仍受很多因素影响,例如应用于农业水果采摘或抓取试验时,由于机械手与水果有时会发生滑动、掉落等现象,并不是每次都能成功把抓取到的目标物体放入水果筐中。图5 所示为桌面机械臂实际抓取水果图,理论上来讲,只要在桌面机械臂工作区范围内,水果种类是 Faster R-CNN目标检测网络中已经定义过的,且识别后水果体积不大于机械抓手最大张开尺寸,桌面机械臂都会进行抓取,这为农业水果采摘及捡选自动化技术提供了支持。

图5 机械臂抓取目标物体
3 国际典型机型及其应用特点
机械臂从20世纪40年代出现到目前为止,己经有将近80年的历史了,在这样的历史长河中,人类对它的研究并没有随着时间的流逝而削弱,而是越发的投入和深入。生活因为机械臂的出现而变得多彩,现在可以通过一款机械臂来帮助我们完成任务,而不必自己动手。国外的机械臂研究现状可以通过以下两种机械臂的概况来简单的介绍。
3.1 空间机械臂
空间机械臂是一个空间机电系统,这个系统由机、电、热、控共同组成。随着空间技术(特别是航天飞机、空间站、空间机器人等)的飞速发展。空间机械臂在太空中的应用越来越广泛。空间机械臂主要有两大类:舱外机械臂、舱内机械臂。前者针对不同的工作任务需求,其自由度通常为5~10个,长度通常是从几米到十几米,主要安装载体在空间站、航天飞机、以及小型飞行器上。它主要的任务有:运送目标、辅助进行对接、摄影、在轨建设、抓捕或者释放卫星等,此外它还可以作为辅助设备,帮助航天员进行出舱活动。而后者具有尺寸小、运动范围小等特点,它的主要任务是更换设备部件、装配设备以及打捞空间漂浮物等。
德国宇航中心在20世纪90年代研制并成功发射了小型空间机器臂系统ROTEX。这种系统安装了各种类型的执行机构和传感机构,拥有8个自由度。能够精准的完成1 m的范围内预设的操作。在“国际空间站”的美国舱段上,装有NASA公司和Canada公司共同研制的自由飞行机器人,是当前正在进行的研究。这种飞行机器人由一个特殊用途的灵敏机械手(SPDM)(15个自由度、长3.5 m)和一个空间站遥控操作臂系统SSRMS (7个自由度,长17.6 m)组成。除此之外,由欧洲航天局主导开发的机械臂ERA还被日本和俄罗斯分别装配在其国际空间站的所属舱段上,这种机械臂长度大约11 m,并拥有7个自由度,国际空间站SSRMS机械臂如图6 所示。

图6 国际空间站SSRMS
3.2 关节型机械臂
RMP200机器人组成平台如图7所示,是由Segway(赛格威公司)与一家机器人制造商制造的RMP200轻机器人。其有一个相对较小的轨迹和高机动性能的平台使它适应在室内环境移动。RMP200机器人具有较长的长臂和有效载荷比自身的重量,从而使其适合移动操作。

图7 RMP200机器人组成平台
日本早在20世纪80年代也开始了对农业采摘机械臂的研究。1984年,日本Kyoto大学开始了对番茄采摘机械臂的研究,并研制出了一个5自由度的关节型机械臂。1993年,日本Kondo 等人研制的番茄采摘机械臂具有7个自由度,其末端执行器由两个机械手指和一个吸盘组成,视觉传感器主要由彩色摄像机来寻找和识别成熟果实,利用双目视觉方法对目标进行定位,行走装置采用4轮结构。与此同时,Kondo 等人还针对草莓的高架栽培模式和传统模型研制出了相应的草莓采摘机械臂。该机械臂具有5个自由度,视觉系统与番茄采摘机械臂类似,末端执行器采用真空系统加螺旋加速切割器。五自由度番茄采摘机械臂如图8所示。

图8 五自由度番茄采摘机械臂
KUKA医疗行业合作伙伴Sunya Tech(舜若科技)研制LBR med 系列作为灵敏的七轴轻型机器人可以简单灵活地集成到医疗器械中,从而执行各种医疗活动。灵敏的传感器技术、全面的安全防范、卫生方面优化过的表面,以及为直接与人协作而设计的控制系统,使其特别适用于医疗技术。此外,使用 LBR Med技术,医疗器械制造商也能够更快更容易地开发和许可基于机器人组件的产品,因为 LBR Med 已通过国际认可的 CB 体系认证,LBR med 系列机械臂如图9 所示。

图9 LBR med机械臂
4 可编程机械臂技术及意义
美国作为科技强国,其机器人技术在世界上名列前茅。世界上第一台可编程机器人就诞生在美国,并且在1961年成功将其应用到美国通用汽车生产流水线上。斯坦福大学的研究人员于1966年成功研发出世界上第一台具有环境识别和环境建模能力的移动式机器人。1978年世界著名的机器人研发公司Unimation公司成功研发出一系列通用的、可编程、可灵活装配的机器人。同样,机器人技术强国日本,于1979年成功研发出世界上第一台用于垂直方向上装配的铰接式机器人。
机械臂的发展及功能的多样化带动着国家经济的快速提升,利用先进的科研技术在机械臂研发与应用领域占据了智能化市场;劳动工具是生产力发展水平的主要标志,国外的机械臂技术不断为经济各部门提供先进的技术装备,保证各部门的生产在先进技术的基础上不断发展,从而带动整个国家经济的现代化,有效体现了机械臂技术研发与应用重要性及必要性。
5 结论
随着机械臂越来越广泛的得到了应用,逐渐改善了传统生产模式,在机械行业中它可用于零部件组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。目前,机械臂已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,它适用于中、小批量生产,可以简化庞大的工件输送装置,结构紧凑,而且适应性很强。当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。而目前我国的机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械臂的研究和开发直接影响到我国自动化生产水平,无论从经济上、技术上考虑增强相关技术的研究都是十分必要的。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
车主之友(2023年2期)2023-05-22
军事文摘(2022年18期)2022-10-14
小天使·三年级语数英综合(2022年4期)2022-04-28
军事文摘(2021年18期)2021-12-02
汉语世界(The World of Chinese)(2019年1期)2019-03-18
中国眼镜科技杂志(2017年13期)2017-08-16
通信电源技术(2016年1期)2016-04-16
机电信息(2015年3期)2015-02-27
河南科技(2014年11期)2014-02-27