基于ReliefF和DBN的齿轮箱故障模式识别方法研究
2021-04-01 05:38王艺华张鑫瑞
农机使用与维修 2021年3期
夏 源,王艺华,张鑫瑞
(西安工业大学 机电工程学院,西安 710021)
0 引言
齿轮箱是连接和传递动力的传动装置,被广泛用在农业机械中。但由于其内部结构复杂,工作环境恶劣等因素,齿轮和轴承等主要部件易发生故障。因此,对齿轮箱进行故障特征提取和模式识别是当前亟需解决的问题。
为此,采用ReliefF算法对齿轮箱振动信号的特征向量进行降维,去除敏感度较差的特征向量,保留敏感度高的特征向量。将敏感度高的特征向量导入深度置信网络中,进行故障的模式识别。
1 ReliefF 算法简介


式(1)中:diff(A,R,Hj)是样本R与Hj在特征A上的差;C为与样本R不同的类总数;P(C)为第C类的概率;class(R)为样本R所在的类;M为类C中与样本R的第J个最近邻样本;diff(A,R,Mj(C))为样本R与样本M在特征上的差。
其中diff(A,R,Hj)分为两部分,其中对于离散变量
(2)
对于连续变量
式(2)、式(3)中R(A)和Hj(A)代表R和Hj在特征A下的样本值。
(5)反复计算上述步骤m次,获得特征向量权重。
最后设定一个权重阈值,将超过该值的特征向量构成敏感特征集合,完成特征降维。
2 深度置信网络
深度置信网络(Deep Belief Net, DBN)由两部分构成,分别是基于受限玻尔兹曼机(Restricted Boltzmann Machine, RBM)的无监督训练和反向调参。
2.1 基于RBM的无监督训练
无监督训练阶段最重要的就是训练RBM,以确保获得准确的权重值。RBM的可见节点和隐含节点间是全连接,而隐含层和可见层层内两两之间不存在连接[2]。在训练RBM时,原始数据输入到可见层,形成向量V,再通过权重值W传递给隐含层,得到向量H,这样可以同时得到所有的隐含层节点值。隐含层向量和可见层输入向量的差值,就作为权重更新的依据。
2.2 反向调参阶段
DBN中有多个RBM构成。上述过程为单独训练每个RBM网络,并不能够保证DBN网络的特征向量输出最优。因此DBN最后一层选用BP神经网络作为模式识别分类器。在分类过程中,将训练后的输出与理想输出的差值反向传播,调整DBN网络参数,完成反向调参过程。
3 实验分析与数据处理
3.1 实验数据
本文使用PHM2009齿轮箱故障数据集[3]进行实验。加速度振动传感器数据作为实验数据。电机转速1800 r·min-1,采样频率为67 kHz,采样时间为4 s。其中,齿轮箱共有8种复合故障类型。本文以4500个采样点为一组数据样本,每种故障类型提取40组数据样本进行分析。
3.2 ReliefF算法的特征向量降维
将8种状态振动信号用变分模态分解(Variational mode decomposition, VMD)方法处理,进而提取每个IMF分量的时域与能量熵值特征,具体操作步骤如下:
(1)将故障3信号用VMD将信号分解成8个IMF分量。如图1所示。

图1 故障3状态下振动信号模态分解
(2)计算振动信号的各个IMF分量与原始振动信号的互相关系数。主要分两步,第一步计算原振动信号与各IMF的自相关系数,公式如式(4)
(4)
其中,x(i)是各采样点数值,N表示数据长度。
第二步计算原始振动信号和IMF分量信号的互相关系数
(5)
由式(5)计算所得的值范围在[0,1],值越接近1,表示IMF分量与原信号相关性越大。
(3)利用相关系数提取主要IMF分量。由表1可知,前三个IMF分量的系数较大。因此提取各状态振动信号的前三阶IMF分量进行分析。

表1 IMF分量与原始信号的相关系数
本文提取的无量纲特征参数主要有峰值、脉冲、波形、裕度和峭度指标,设定xi(t)为信号数据,xi为各点幅值,N为采样点数,δ为标准差。各指标计算公式如表2。

表2 五种无量纲时域特征计算公式
同时,能量熵能够反映正常信号同故障信号之间的能量变化,各频带能量变化情况包含故障信息。对信号的分解具有正交性时,分量信号功率之和与原信号功率E相等。各分量的功率Ei计算如式(6)
(6)
设pi=Ei/E,且∑ipi=1,则能量熵的定义,如式(7)
Ee=-∑ipilogpi
(7)
因此,提取每个IMF在时域上的五个无量纲特征和能量熵特征,共18个特征向量。经特征提取后,用ReliefF算法进行降维。如表3所示,权重值越大的表示对故障越敏感。

表3 特征向量权重值值
分析上表数据,本文将权重阈值设为5,以实现特征向量的降维优化。此时优化后的特征向量为式(8)
T=[T15、T18、T12、T9、T1、T6、T3、T10]
(8)
3.3 模式识别
为验证本文提出方法的准确性,以4500个采样点为一组数据样本,一共8种状态,每种提取40组数据样本,共有320组数据。在实验中随机抽取50%作为训练样本,50%作为测试样本。将降维后的特征向量与未降维的特征向量导入DBN中,模式识别结果如图2、图3所示。
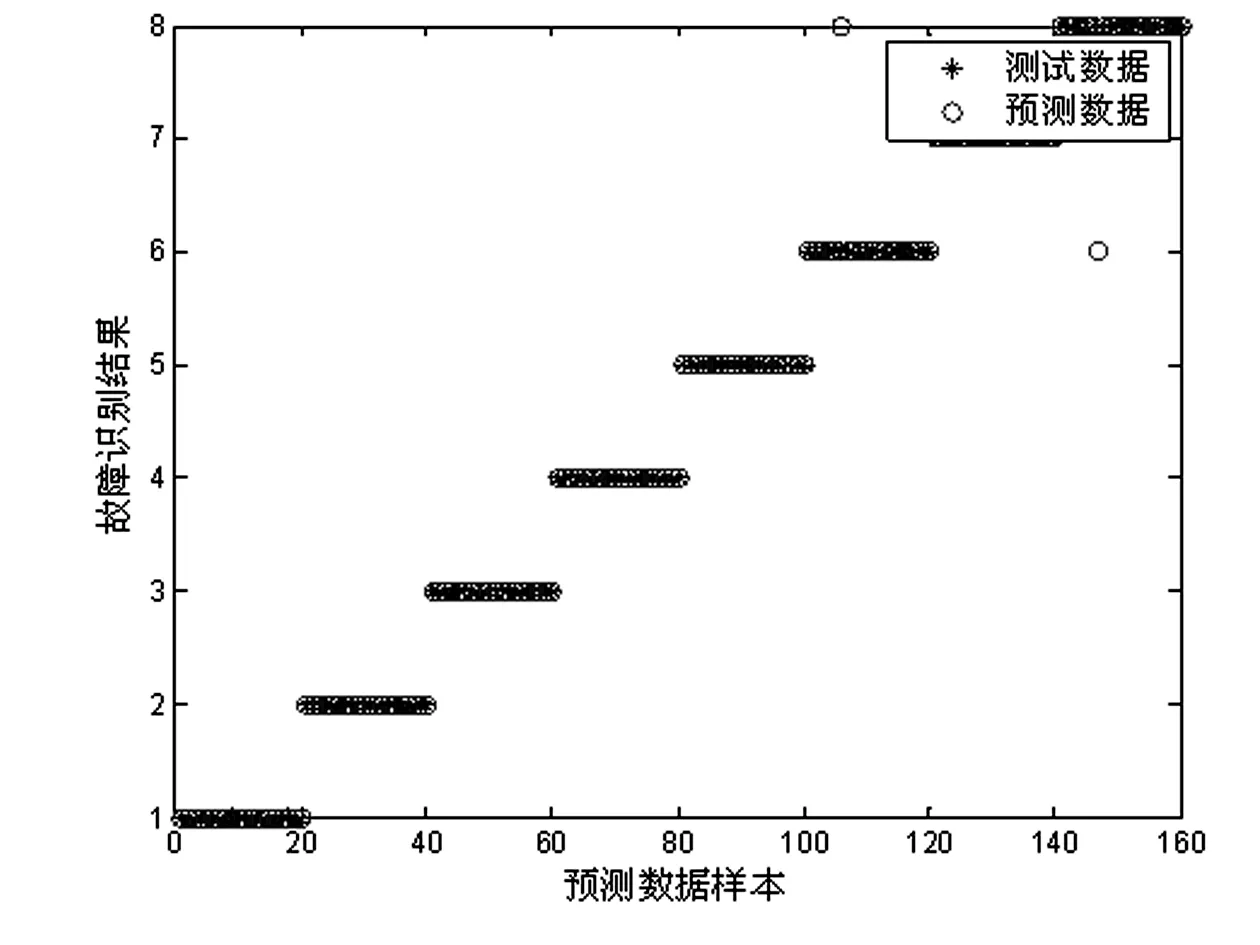
图2 ReliefF对特征向量降维后的识别准确率

图3 未降维特征向量的识别准确率
4 结论
(1)仅以未降维特征向量作为深度置信网络的输入不易区分故障类型,本文提出应用ReliefF算法降维的特征向量能够使识别准确率提高11.87%。
(2)由表4对此可见,DBN网络进行训练和学习,能够在训练样本数目较少的情况下有较好的分类效果,结合ReliefF算法,能够准确识别出齿轮箱故障状态信息。
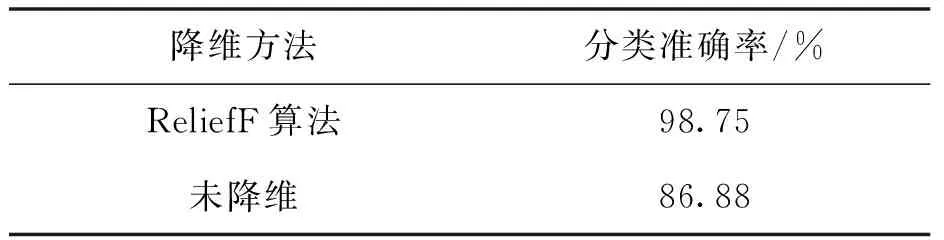
表4 DBN模式识别效果对比
猜你喜欢
车主之友(2022年4期)2022-08-27
山东冶金(2022年3期)2022-07-19
海峡姐妹(2019年12期)2020-01-14
制造技术与机床(2017年4期)2017-06-22
电子测试(2017年23期)2017-04-04
智能系统学报(2017年5期)2017-01-22
风能(2016年12期)2016-02-25
智能系统学报(2015年3期)2015-01-29
计算物理(2014年1期)2014-03-11
燕山大学学报(2014年1期)2014-03-11