水下航行器基础运动控制仿真研究∗
2021-04-06 07:13
舰船电子工程 2021年3期
(海装上海局驻上海地区第七军代室 上海 201108)
1 引言
当前水下无人航行器(Unmanned Underwater Vehicle)在军用和民用领域飞速发展,并在工程实践中发挥着越来越重要的作用[1,2]。水下无人航行器的驱动模式主要有舵桨推进操纵、推进器推进操纵、仿生推进操纵等多种形式,其中舵桨操纵具有总体简洁、阻力性能好、可靠性高等优势,应用最为广泛[3]。舵桨操纵形式的UUV六自由度空间运动具有典型的耦合性和非线性特征,使其运动控制非常复杂[4~5]。研究UUV的运动仿真技术、建立UUV的基础运动控制方法,对UUV的设计和应用具有重要的意义[6]。
文中基于刚体的动量定理和动量矩定理得出的UUV动力学方程,结合空间运动方程,建立起UUV的六自由度空间运动的数学模型[7~8]。并针对某小型UUV概念设计阶段模型的水动力参数,基于龙格-库塔法求解微分方程,编写相应的六自由度运动仿真程序,实现对UUV空间运动的计算机仿真。采用比例-微分(PD)[9]控制方法对该UUV的速度、艏向、深度这三个基础运动进行控制[10]。通过对UUV基础运动控制的研究,可对UUV的操纵性能评估提供参考,还能够为UUV的路径规划、路径跟踪等应用研究提供底层技术支撑。
2 UUV空间运动方程
2.1 运动方程建立
研究中采用ITTC建议的用以描述水下航行器运动的坐标系[11~12]。固定坐标系O-XYZ,或称全局坐标系,原点O定在水面或水中一固定点,OX轴一般水平指向北方;OZ轴竖直指向地心,OY与OX轴和OZ轴构成右手系。运动坐标系o-xyz,或称局部坐标系,为非惯性系,坐标原点o固定航行器上某一点,ox轴指向艏正前方;oz轴垂直ox轴指向底部;oy轴与ox轴、oz轴构成右手系。本研究中,运动坐标系原点设在UUV浮心位置,固定坐标系原点在UUV运动的初始位置。
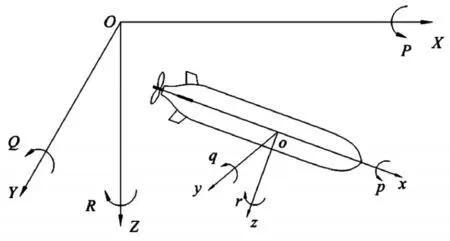
图1 水下航行器坐标系
在运动坐标系原点位于固定坐标系原点时,将固定坐标系进行旋转变换可与运动坐标系重合,变换矩阵和变换方法如下。
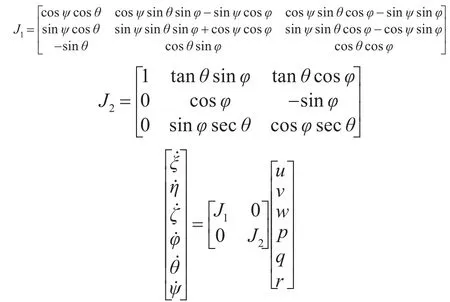
根据动量定理和动量矩定理导出水下航行器的动力学方程:

式中,M1为航行器的广义质量矩阵,C(V)为航行器自身的科氏力和向心力矩阵。
2.2 水下航行器受力
2.2.1 静力
水下航行器受静力作用包括自身的重力与浮力作用。本文中在坐标原点,因此静力(矩)GP可表示为
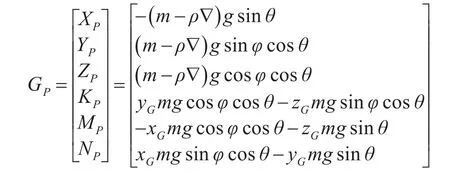
式中,∇为水下航行器的排水体积,ρ为流体密度。
2.2.2 水动力
水下航行器所受水动力包括惯性类水动力和粘性类水动力。
对于鱼雷形UUV,左右对称,上下对称,附加质量矩阵如下。
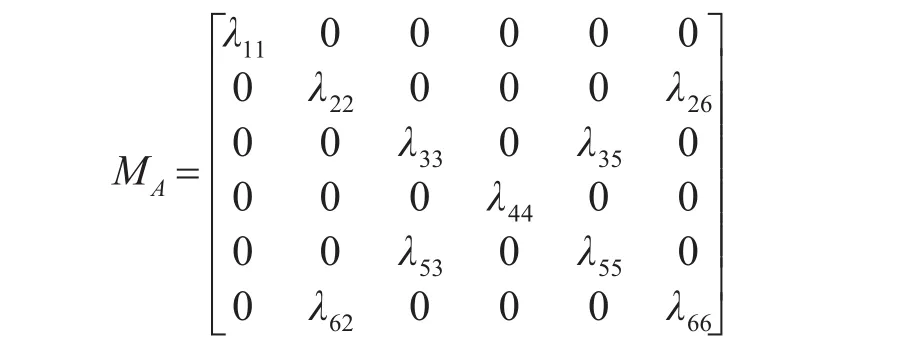
与附加质量相关的惯性类水动力(矩)GA,表达式如下。

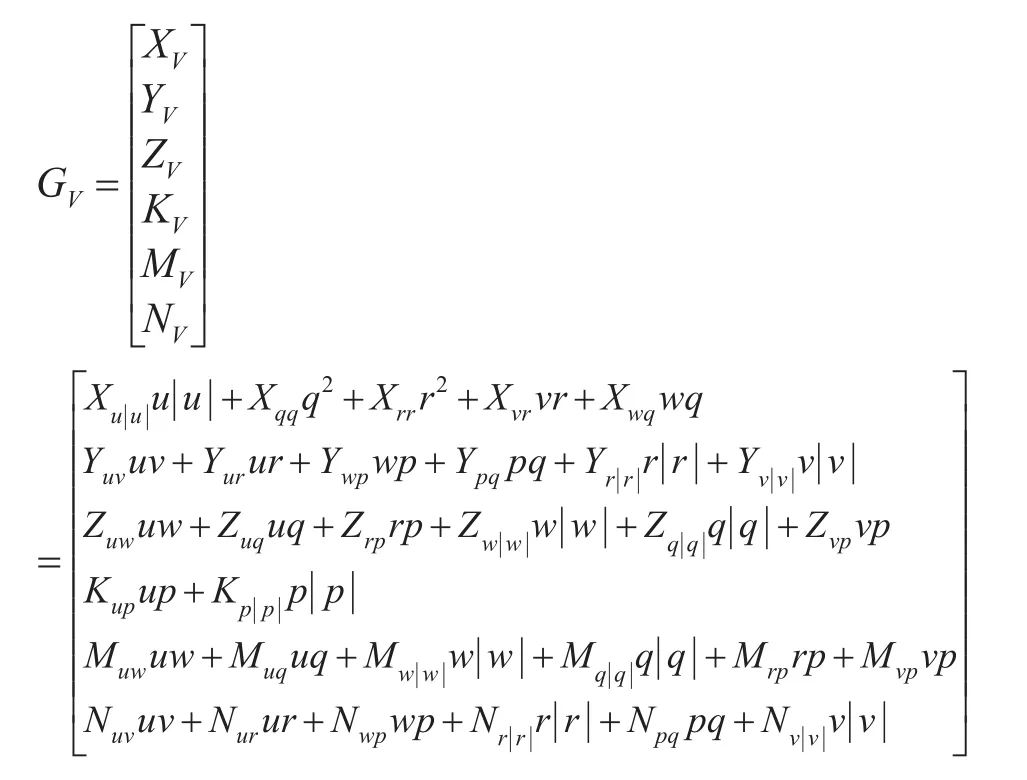
结合水下航行器的外形特征,可将粘性水动力(矩)GV写成下列形式。
2.2.3 控制力
针对舵桨操纵的水下航行器,其控制机构主要是舵和桨,控制力是舵的力和桨的力。
水下航行器的操纵舵可视为小展弦比的机翼,且通常为对称翼型。舵在流体中受升力和阻力的作用,升力和阻力的大小与流速和舵升(阻)力系数相关。
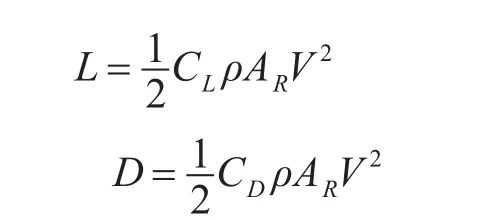
式中,CL和CD分别是舵的升力系数和阻力系数,与舵角相关,AR是舵面积。
舵的作用可表示为
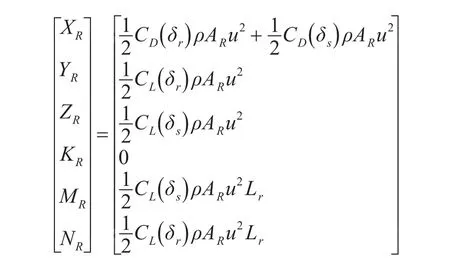
式中,Lr是舵轴距动系坐标原点的距离。
考虑螺旋桨的推力系数、转矩系数与无因次量进速系数相关,进速系数又由螺旋桨进速、转速和直径确定,因此将螺旋桨推力和扭矩的作用以转速、进速的函数来表示。结合螺旋桨敞水曲线的特点,采用二次多项式简化的拟合推力系数曲线和转矩系数曲线。若有伴流分数w和推力减额分数t的值,也可以带入桨的计算式中。螺旋桨作用力的最终表达式可写成:
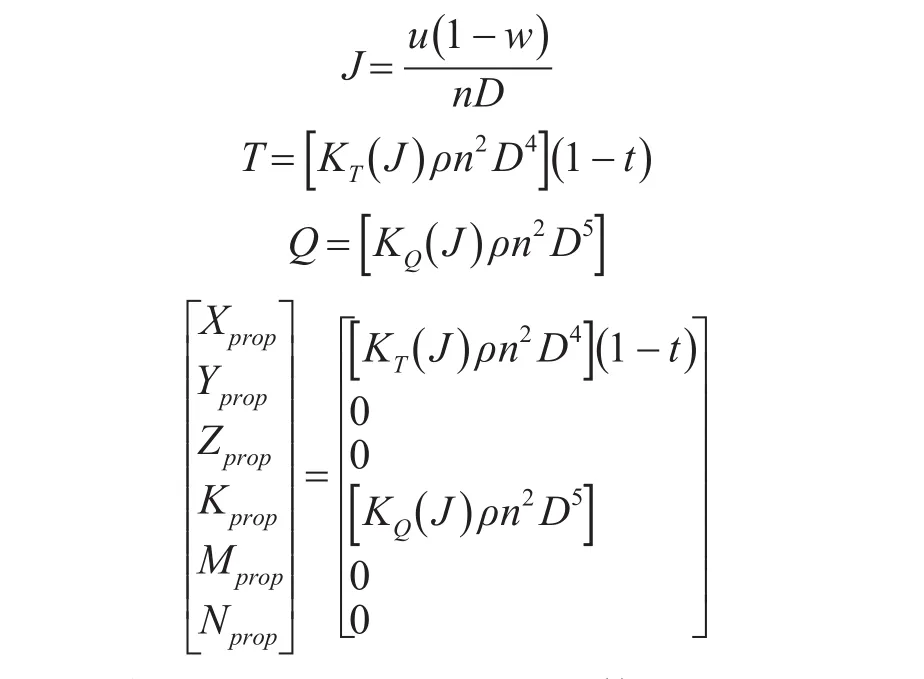
最终,UUV动力学方程可具体的写成以下的形式。

3 运动仿真
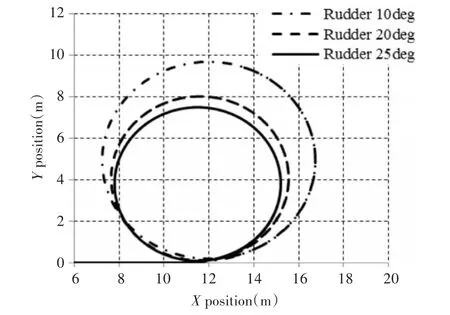
图2 UUV回转轨迹曲线
基于以上建立的UUV运动方程,采用四阶龙格—库塔法求解偏微分方程,编制UUV六自由度空间运动仿真程序。本文研究的UUV模型,长1350mm,直径188mm,重30kg。UUV尾部配备一只直径150mm的常规螺旋桨,尾部收缩段安装两片水平舵和两片垂直舵。
采用仿真程序对以1m/s速度直航的UUV进行回转操舵运动进行预报舵角分别为10deg、20deg、25deg。
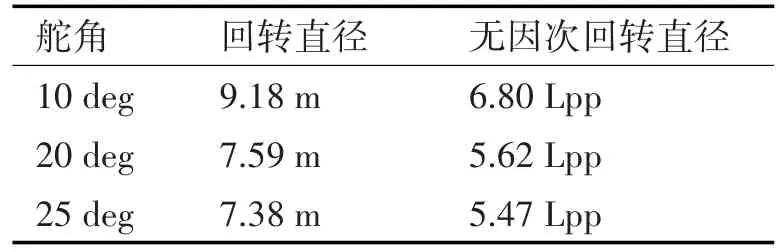
表1 航行器回转直径
水平面轨迹仿真曲线直观的仿真出了航行器回转航行的轨迹,并通过轨迹点坐标计算出回转直径。
4 UUV基础运动控制
4.1 定速控制
采用PD控制算法对UUV螺旋桨转速进行控制,分别设定UUV前向目标航速0.5m/s,1m/s,1.5m/s,仿真得到的UUV前向航速和螺旋桨转速变化曲线如下所示。

图3 UUV航速变化曲线
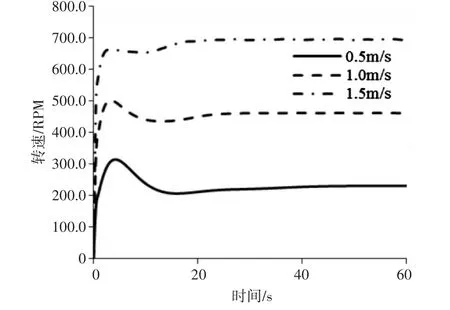
图4 螺旋桨转速变化曲线
从UUV航速变化曲线可以看出,采用本文中的PD算法,UUV航速在20s左右达到稳定,误差在2%以内。
4.2 艏向控制
设定初始状态UUV以1m/s速度保持直航,采用PD算法对垂直舵进行控制,使UUV艏向改变30°、60°、90°,仿真得到的UUV艏向角和垂直舵角变化曲线如下所示。

图5 UUV艏向变化曲线
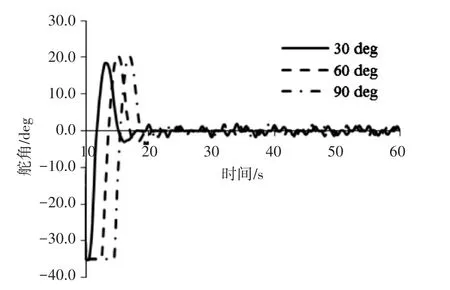
图6 UUV垂直舵舵角变化曲线
从UUV艏向和垂直舵舵角变化曲线可以看出,采用本文PD控制算法,在最大舵角35deg限制条件下,UUV在达到目标艏向后,经过7s左右即能稳定在目标艏向角。
4.3 深度控制
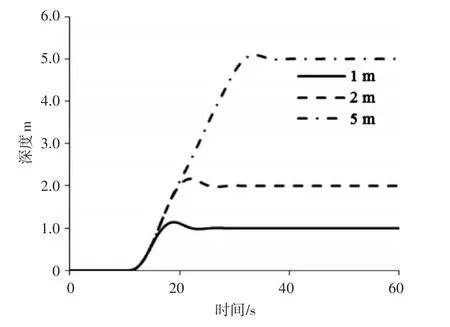
图7 UUV深度变化曲线
设定初始状态UUV以1m/s速度保持直航,采用PD算法对水平舵进行控制,使UUV深度改变1m、2m、5m,仿真得到的UUV深度和水平舵角变化曲线如下所示。
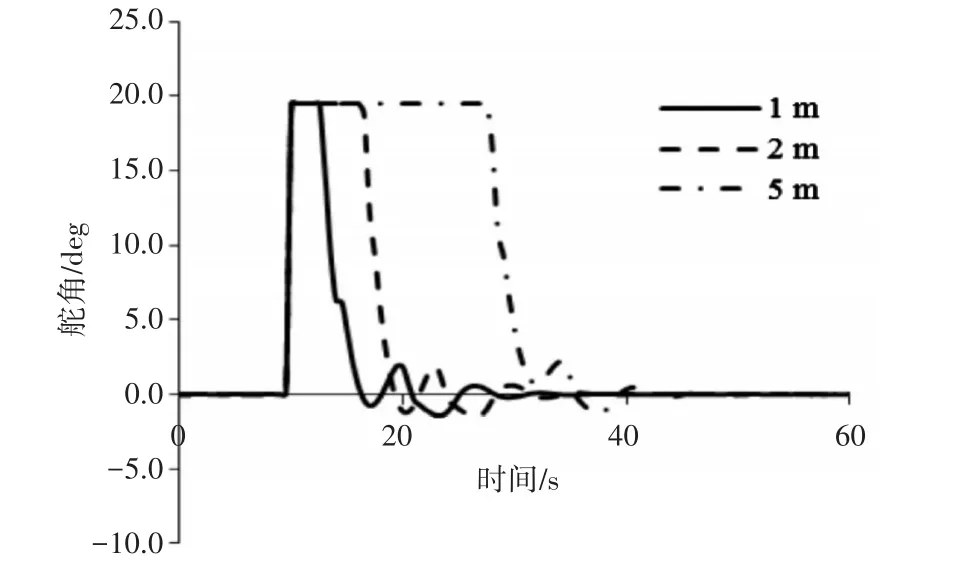
图8 UUV水平舵舵角变化曲线
从UUV艏向和水平舵舵角变化曲线可以看出,采用本文控制算法,在最大舵角20deg限制条件下,UUV在达到目标深度后,经过5s左右即能稳定在目标深度。
5 结语
通过对水下航行器运动和受力的分析,建立了水下航行器的动力学方程,编写了完善的水下航行器运仿真程序。基于建立的水下航行器运动仿真程序,结合某小型UUV的水动力系数建立数学模型,对UUV的运动进行仿真。通过UUV回转试验验证了程序的可行性。基于PD算法,分别对UUV航速、艏向、深度控制进行了数值模拟,得到相应运动仿真结果,实现了UUV基础运动控制目的。
水下航行器运动仿真程序的建立,为研究水下航行器运动控制提供了有效的研究工具。结合仿真程序,能够在计算机中实现对控制算法的效果仿真、评估,并能通过仿真效果对控制算法进行针对性的修改。
猜你喜欢
创作(2020年5期)2020-11-02
语数外学习·初中版(2020年2期)2020-09-10
航空世界(2019年1期)2019-10-11
中国测试(2018年9期)2018-05-14
航空模型(2017年5期)2017-12-14
中学科技(2017年10期)2017-11-04
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
中学生数理化·中考版(2008年6期)2008-10-30
中学生数理化·高考版(2008年12期)2008-06-17