基于模糊自适应PID的卷绕系统张力控制
2021-04-06 05:45陈明霞郑海涛尹浚成赵金迪
毛纺科技 2021年3期
陈明霞,郑海涛,尹浚成,赵金迪
(桂林理工大学 机械与控制工程学院,广西 桂林 541004)
在生产制造、机械加工中,大多数是使用多台电动机同步协调运作组成卷绕控制系统。张力控制是卷绕系统中的关键环节,是为了卷绕材料在卷取以及开卷过程中保持张力恒定或者在某一特定范围内,其广泛应用于纺织、造纸、印刷、橡胶等行业中。在生产制造过程中,卷绕系统对张力的大小有着严格的控制要求。张力太大将会使得生产制造的卷绕材料被过大的张力拉断;张力不足也会引起材料在卷绕的过程中产生褶皱或者卷绕材料脱落的现象;而张力不稳定又将使产品的品质受到影响,因此,在卷绕过程中,往往需要将卷绕材料的张力变化保持在所允许的范围内[1-2]。
因为常规PID具有原理简单,容易实现且鲁棒性强和适用面广的特点,并且还具有能改善系统的动态特性以及稳态特性的优点,因此在传统的张力控制中一般都是采用常规的PID控制。但是常规PID一般对模型的精确性要求较高,对于具有非线性、时变性并且容易受随机干扰的卷绕张力控制系统而言,并不能取得良好的张力控制的效果[3-4]。查阅国内外张力控制研究成果,大部分还是在设备上进行改进从而提高设备控制精度,但是这种方法成本较高并且维护难度较大。为了解决上述问题,本文提出了一种模糊自适应PID控制卷绕系统张力的方法,使得卷绕系统具有自动整定控制参数的能力,可以在生产中适应被控对象的变化,并且在实验平台上,实际的卷绕系统张力控制中取得了良好的控制效果。
1 卷绕系统张力控制模型
一个完整的卷绕张力控制系统一般由收放卷机构、控制和张力检测装置以及辅助装置等组成[5-6]。实际应用中,卷绕张力系统也可由其中的部分组成,卷绕系统结构简图如图1所示。放卷辊、收卷辊在相应的伺服电动机的控制下进行开卷、卷取卷绕材料,张力传感器感知卷绕材料的张力,系统根据张力设定值与实际值之间的差值相应地控制放卷辊或者收卷辊的电动机速度,进而调整系统的张力,因而卷绕系统的张力是基于速度差原理产生的,控制张力就是控制放卷辊与收卷辊的速度差。

图1 卷绕系统结构简图
卷绕材料在卷取的过程中被拉伸,如果形变在其弹性形变范围内,那么卷绕材料两端的张力则满足胡克定律。研究卷绕系统的张力时,忽略其他因素的情况下,可以将该系统的张力分析简化[7-9],整个过程可以简化成如图2所示的简图。

L—形变后卷绕材料长度(m);V放—放卷辊速度(m/s);V收—收卷辊速度(m/s);D放—放卷辊直径(m);D收—收卷辊直径(m)。
根据胡克定律,张力分析为:
(1)
(2)
(3)
式中:σ为卷绕材料受到的应力,Pa;ε为卷绕材料产生的弹性形变;E为卷绕材料的弹性模量,N/m2;T为张力,N;A为卷绕材料的横截面积,m2;L0为卷绕材料产生的绝对形变量,m;L为当前状态下因张力产生形变后的卷绕材料长度,m。
当V放≠V收时,t+dt时间内,张力变化如下:
(4)
由于应力σ引起的形变ε≪1,则:
(5)

(6)
V=πDn
(7)
式中:n为收放卷辊的转速,rad/s;D为收放卷辊的直径,m。
整理以上各式可得卷绕材料张力为:
(D收n收-D放n放)dt
(8)
综合以上各式说明卷绕过程中卷绕材料受到的张力是由放卷辊和收卷辊之间的速度差产生的,要使得张力控制在一定值,则要控制好收放卷辊的速度,同时由式(8)可以看出,这是一个时变、非线性的系统,用传统的PID控制系统很难实现良好的控制。
2 模糊自适应PID控制器设计
2.1 模糊自适应PID控制器原理
卷绕系统将张力设定值作为输入,将收放卷辊的伺服电动机转速作为输出,利用模糊自适应PID控制器以及张力传感器进行对系统的反馈调节。将卷绕材料张力的偏差e和偏差变化率ec作为模糊自适应PID控制器的输入,制定相应的模糊规则控制表,以参数Kp,Ki,Kd修正量作为输出,根据模糊推理方法对Kp,Ki,Kd实现在线调试,使其与偏差e和偏差的变化率ec相匹配,从而满足对PID参数的自适应要求[10]。控制结构如图3所示。
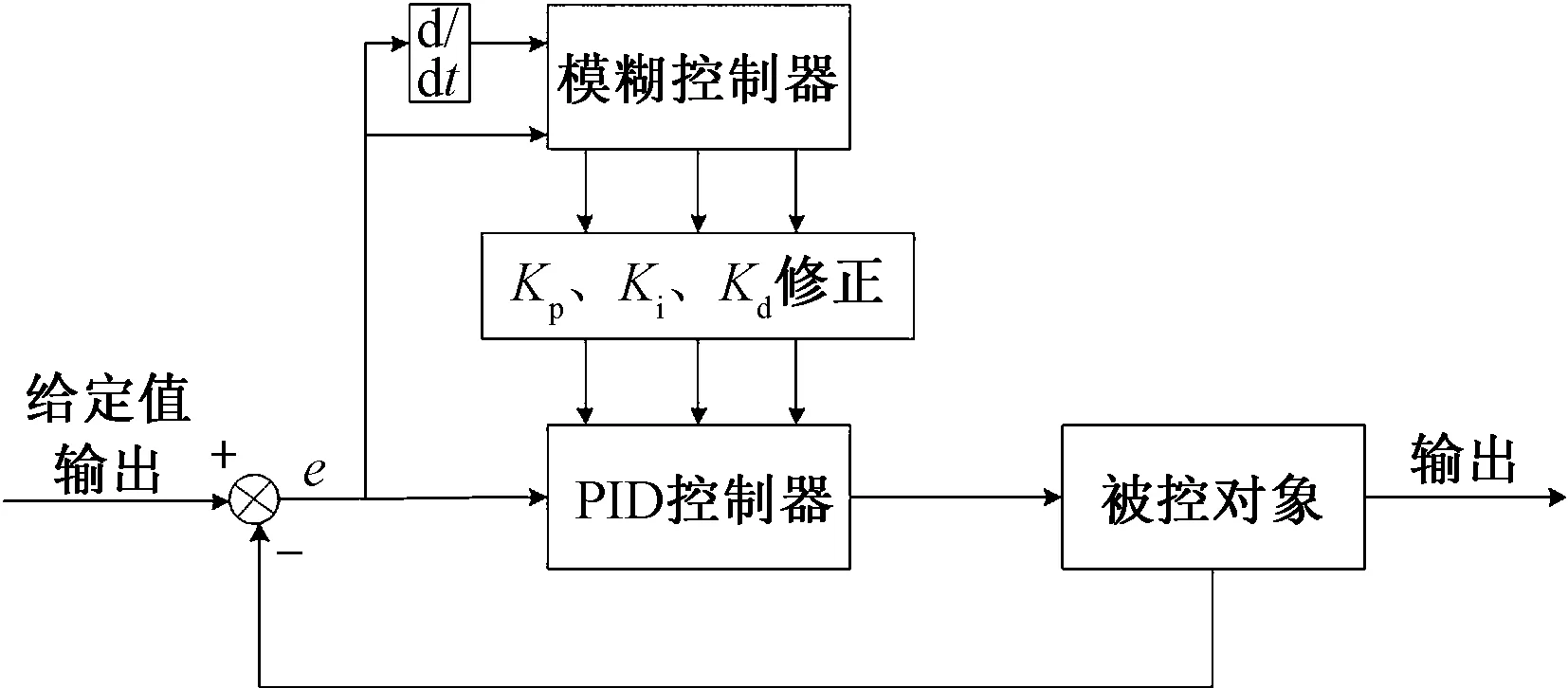
图3 模糊自适应PID控制器结构图
2.2 模糊变量论域隶属度函数
将e和ec设为输入变量,ΔKp、ΔKi和ΔKd设为输出变量,模糊语言集均为:{NB,NM,NS,ZO,PS,PM,PB},即{负大,负中,负小,零,正小,正中,正大}。e和ec的离散论域设为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},ΔKp、ΔKi和ΔKd量化论域设为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。量化因子取Ke=0.6,Kec=0.6,比例因子Kup=0.22,Kui=1和Kud=1。
使用陡峭的隶属函数可以使得控制获得较高的分辨率,以及提高控制的灵敏度;使用平缓的隶属函数会降低控制的灵敏度。在实际的应用中,离系统平衡点较远偏差较大时,可以使用低分辨率隶属函数;靠近平衡点偏差很小时,可以使用高分辨率隶属函数。本次实验中采用三角形隶属度函数,其中e、ec;ΔKp、ΔKi、ΔKd的隶属度函数如图4所示。

图4 e、ec、ΔKp、ΔKi、ΔKd的隶属度函数
2.3 模糊控制规则的建立
在模糊控制系统中,其主要核心为模糊控制规则表[10-11],其作用相当于是传统控制系统中的校正器或补偿器[12-14]。对于需要满足不同的e和ec以及对控制参数的要求不同,因此根据此规则制定相应的模糊控制规则表。使得控制对象能有良好的动态和静态性能。模糊规则控制表如表1所示。

表1 Kp/ki/Kd的模糊控制表
2.4 清晰化
在模糊控制中,对于模糊量的清晰化是非常重要的环节,因为经过模糊逻辑推理后,输出的是模糊集合,要将模糊集合等效成一个清晰值,然后才能将其应用于系统的控制当中。加权平均法、最大隶属度法以及中位数法等都是清晰化常用的方法。其中加权平均法较为适用于精度要求较高的系统,故本文实验采用加权平均法。
采用加权平均法计算控制器的输出ΔKp、ΔKi、ΔKd,表达式如下:
(9)
式中:μuj(ΔKu)为P、I、D 3个参数的第j级隶属度,ΔKuj为P、I、D 3个参数的第j级元素加权系数。
PID参数的整定表达式为:
Ku=Ku0+ΔKu
(10)
式中:Ku0为传统PID控制3个参数的初始值;Ku为PID控制系统参数变化值和初始值的总和;ΔKu为PID控制系统参数调整时的变化值。
3 仿真实验及其结果分析


图5 卷绕控制系统仿真模型
在仿真实验中,用阶跃信号作为实验的输入信号,在系统运行平稳后,在20 s时将输出信号幅值改为2,观察传统PID控制和模糊自适应PID控制2种算法下系统的适应情况。实验结果如图6所示。由MatLab/Simulink的仿真结果观察可得,模糊自适应PID控制比传统PID控制具有更快的响应,上升时间4.0 s优于传统PID的4.1 s,迅速达到稳态值,最大超调量控制在1%,可认为没有产生超调,优于传统PID的8%,调节时间5.0 s优于传统PID的9.6 s。2种算法的控制性能如表2所示。

表2 不同算法控制性能仿真比较

图6 仿真结果
为了进一步验证模糊自适应PID算法的实际应用效果,在西门子卷绕系统实验平台上进行传统PID控制和模糊自适应PID控制的实验对比分析,实验平台如图7所示。

图7 卷绕系统实验平台
建立系统的项目函数,将在MatLab/Simulink中实现的模糊自适应PID控制算法在全局脚本编辑器中用C语言进行编程实现。一般情况下,考虑实际系统的控制时效性,在实际的计算机控制中,模糊自适应PID控制算法一般通过查询模糊控制表的方法实现。
①通过全局脚本查询模糊控制表。
//变量e对应(-6,6)进行等级化处理
e=ac-sp; //实际误差值e
if (e<0) //先判断e的正负,方便下一步进行四舍五入
E=(int)((ke*e)-0.5); //将e进行四舍五入然后转换成对应的等级量
else
E=(int)((ke*e)+0.5);
if (E>m)
E=m;
if (E<-m)
E=-m;
i=E+m+1; //得到对应的E在模糊控制表的位置
//变量ec对应(-6,6)进行等级化处理
e0=GetTagFloat(“ec0”); //获取上一状态误差值
ec=e-e0; //当前误差减去上1个误差
if (ec<0) //先判断ec的正负,方便下一步进行四舍五入
EC=(int)((ke*e)-0.5); //将ec进行四舍五入然后转换成对应的等级量
else
EC=(int)((ke*e)+0.5);
if (EC>m)
EC=m;
if (EC<-m)
EC=-m;
j=EC+m+1; //得到对应的EC在模糊控制表的位置
WinCC的全局脚本编辑器能够实现2种不同函数的生成,一种是项目函数,另一种是动作函数。2种函数实现的功能是完全不同的。项目函数和高级语言中使用的函数功能相似,是用来实现设定的计算、数据处理等功能,但是项目函数是不能够被直接执行的,必须使用主函数的调用才能够进行相应的功能。而动作函数则不一样,其只需满足设定条件就可以自动执行相应的动作。因此,在实际工程应用上,在WinCC中一般通过项目函数实现较为复杂的数据计算、处理等算法功能,然后在动作函数中进行调用该项目函数实现算法控制,只要满足动作函数的触发条件,项目函数可以根据动作函数不断自动执行。
②通过动作函数中调用项目函数。
#include "apdefap.h"
int gscAction(void)
{
// WINCC:TAGNAME_SECTION_START
// syntax: #define TagNameInAction “DMTagName”
// next TagID: 1
// WINCC:TAGNAME_SECTION_END
void fuzzypincontrol ();
float sp=GetTagFloat(“张力设定值”); //获取设定值sp
floatac=GetTagFloat(“张力实际值”); //获取实际值ac
floate=sp-ac;
floatwc=e/sp; //稳态误差控制在3%以内
intstpid;
stpid=GetTagBit(“st”);
if(((wc>0.03)||(wc<-0.03))&(stpid==1)) //误差超出3%则进行模糊PID调整参数
{
fuzzypidcontrol ();
}
// WINCC:PICNAME_SECTION_START
// syntax: #define PicNameInAction “PictureName”
// next PicID: 1
// WINCC:PICNAME_SECTION_END
return 0;
}
卷绕系统在运行时,2种算法参数的设置为:传统PID控制器中的参数为kp=0.10,Ti=15,Td=0,模糊自适应PID控制算法中,量化因子e=0.6,ec=0.6,比例因子kep=0.001 5,kei=0.005 5,ked=0。
当卷绕控制系统在设定张力值为60 N时,传统PID控制的效果和模糊自适应PID控制下的效果如图8所示。
与传统PID控制相比,在最大超调量的控制上,模糊自适应PID算法控制更有效地降低了系统的最大超调量,在张力值为60 N时,系统的最大超调量为3.01%,已经进入控制系统的5%稳态误差带,系统的稳定性更强;在系统的调节时间方面,模糊自适应PID算法控制的系统调节时间明显更短,在张力值为60 N时,系统响应上升后直接进入了稳定状态;同样,在峰值时间和响应的上升时间上,模糊自适应PID算法控制总体上均优于传统PID控制,能够更快地到达相应的状态。一般情况下,稳态误差保持在5%以内即可视为系统已经稳定,在稳态误差的控制方面,模糊自适应PID算法控制优于传统PID控制,更能降低稳态误差,使系统更加接近系统设定值,更好地满足实际工程应用的需要,获取良好的控制效果。2种算法控制下的实验结果性能比较如表3所示。
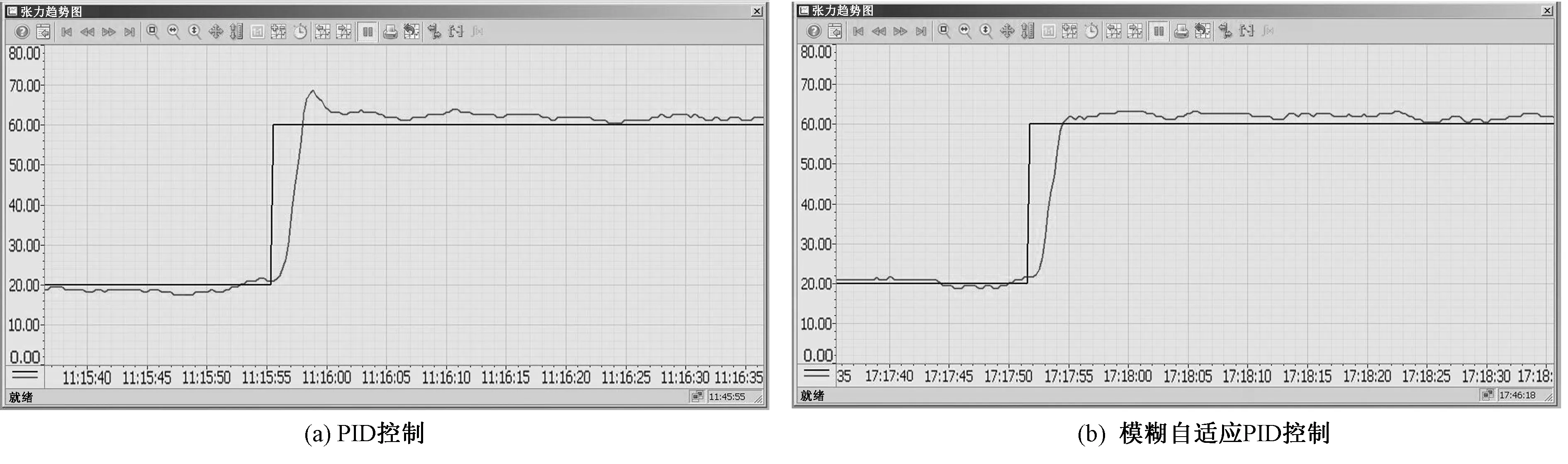
图8 张力趋势实验结果对比
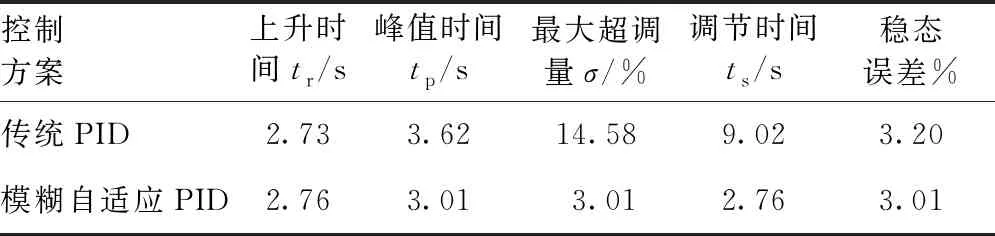
表3 2种算法控制性能实验比较
4 结束语
在实际工程应用中,系统的时效性和稳定性尤为重要,模糊自适应PID算法控制与传统PID控制相比而言,更能适应具有明显的时变性、不确定性等特点的卷绕控制系统,表现出良好的适应性和较强的鲁棒性,获得更好的控制效果,满足实际工程应用的需要。模糊自适应PID控制算法通过在上位机中WinCC全局脚本中进行算法运算,该模式下可以降低PLC的运载负荷,减少PLC的内存占用。同时,在全局脚本中编程与PLC中编程相比,编程的复杂程度降低,程序的可读性更高,灵活性高。同时也验证了模糊自适应PID控制算法在运用到实际卷绕控制系统中具有一定的可行性。
猜你喜欢
中国德育(2022年12期)2022-08-22
汽车实用技术(2022年15期)2022-08-19
少儿科技(2022年4期)2022-04-14
汽车实用技术(2022年3期)2022-02-23
成都信息工程大学学报(2021年6期)2021-02-12
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
学生天地(2020年31期)2020-06-01
电子制作(2019年16期)2019-09-27
中华诗词(2018年4期)2018-08-17
中学生数理化·八年级数学人教版(2016年4期)2016-08-23