
一种基于RFID的图书管理系统
2021-04-29 06:56魏慧
微型电脑应用 2021年4期
魏慧
(青海建筑职业技术学院 图书馆, 青海 西宁 810000)
0 引言
RFID技术在物联网领域扮演着重要角色[1-3],特别是在仓库管理,图书馆管理等需要大规模对物品进行管理的行业。RFID技术在这些领域的应用,能够帮助人们更加便捷地管理所需物品,如在图书馆中快速定位某本书的位置;发现错误摆放的书籍等。该技术的应用能够将人们从繁杂的劳动中解放出来。然而,目前所有的RFID及其他类似技术都在定位精确度方面存在不足,因此最近的研究工作利用了许多不同的技术来提高RFID标签定位的准确性[4-6]。迄今为止,对室内定位精度的根本挑战是来自附近物体的多径反射。本研究介绍一种基于机器人的RFID定位系统MobiTag的设计与实现,该系统可以在图书馆中大面积漫游,确定RFID标签对象的空间位置,而无须繁琐地构建无线地图。MobiTag的机器人将RFID阅读器沿直线移动很小的距离,每隔几厘米读取一次读数,并形成一个模拟的合成孔径雷达系统。最终实现对空间中的标签进行定位。
1 全息图谱技术的原理
全息图谱技术的基本思想是将由多个雷达单元测量的回波剖面与在每个可能位置生成的参考回波剖面进行关联[7-9]。如果目标实际位置在测量位置时,则相关性达到最大值。相反,如果对目标位置存在判断错误,则相关性将很低。一共两个步骤,第一步是在每个可能的位置测量和存储反射信号;第二步包括全息图谱生成和标签定位。如图1所示。

图1 全息图谱原理示意图
图1中,使用点的二维图像网格来描述标记的可能位置。从网格位置格位置gi,j反弹然后到达天线位置Ak的信号,如式(1)。
sr(Ak,gi,j)=ar(Ak,gi,j)ejθr(Ak,gi,j)
(1)
其中,ar(Ak,gi,j)和θr(Ak,gi,j)分别是后射信号的振幅和相位。如果读取器天线移动到M个已知位置,可以计算网格位置gi,j的M个信号。这些M个信号一起构成网格位置gi,j的参考剖面并被存储。
接下来使用反向相关滤波器来关联两个信号以产生全息图谱。设st(Ak)为标签的后向散射信号,由天线Ak接收。逆相关滤波器使用,如式(2)。
C(st(Ak),sr(Ak,gi,j))=ejθr(Ak)·e-jθr(Ak,gi,j)
(2)
将st(Ak)与参考信号sr(Ak,gi,j)相关。
其中,θt(Ak)是天线Ak接收到的相位读数,可以直接从RFID阅读器中获取。对于每个网格位置,然后对所有M个天线进行上述相关操作,并最终进行总结。然后计算全息图谱中网格位置gi,j的像素值I(gi,j),如式(3)。
(3)
其中,F表示适当的归一化因子。如果像素位置是实际标签位置并且没有多径,则接收信号的相位测量应等于参考信号的相位测量,并且所得相关系数最大化。相反,如果标签不在网格gi,j中,则复杂信号将被用随机相位相加,这将导致相消干涉,从而导致I(gi,j)的值较小。为了确定标签的位置,对全息图谱上的每个网格都进行了假设检验。在没有多路径的情况下,产生最高I(gi,j)值的网格应该是标签的真实位置。
2 MobiTag原理
2.1 多频全息图谱
在实际应用中,轮式机器人面临的挑战在于知道其移动时的精确天线位置。如果这些机器人位置估计不准确,将采集到的信号相加会在真实位置造成破坏性干扰,进一步降低标签定位精度。为了减小这种不利影响,在此提出了一种基于多频的全息图谱技术。其基本思想是通过改变RFID查询的信道,充分发挥RFID设备的信道跳变能力。因此,新反向相关滤波器的表示,如式(4)。
(4)
其中,F′表示适当的归一化因子。在这个等式中,N是用于RFID查询的信道数;st(Ak,fl)表示天线Ak接收的l-th信道上的信号。传统全息图谱和本研究的多频全息图谱技术的基本原理,如图2所示。

(a) 传统全息图谱生成方法

(b) 多频全息图谱生成方法
使用不同载波频率上接收到的信号生成的全息图谱的五张图片,如图3所示。

(a) 1 frequency
在一个载波频率上的相位读取产生的全息图谱中出现多个旁瓣(Sidelobe),这使得标签的真实位置(Truelocation)不清楚。当使用来自4、8和12个频率的相位数据时,标签被错误地定位在这些旁瓣上的可能性显著降低。这是因为在单个位置但超过N个不同频率的发射与在N个不同位置但超过一个频率的发射信号具有相似的效果。随着使用更多的通道,精度也会提高。同时还观察到,随着进一步添加信道,定位精度提高的幅度减小。
2.2 多径抑制
从标签返回的无线信号沿所有径向发射,反射到附近的墙壁、桌子和其他物体上,导致多径传播。RFID阅读器报告的相位测量是信号在所有传播路径上的叠加,不一定只是直接路径。因此,在普遍的多径情况下,全息图谱技术所获得的定位精度将显著降低。
基于空间中多径变化的强度[10],MobiTag多径抑制算法的基本思想是检测并找到多径普遍存在的阅读器位置,并排除这些位置的相位读数以生成全息图谱。由于在低多径的阅读器位置,RFID阅读器的相位测量值对应于仅沿直线路径传播的信号。因此,当MobiTag改变载波频率时,相位测量的变化是恒定的。相反,如果无线信号在给定的阅读器位置存在严重的多径,则相位测量应该是对应于许多传播路径的相位值的叠加,因此当改变载波频率时,相位测量值会不规则地改变。
在本研究中,通过一个微观基准来验证这一观察结果。本研究设计了一个RFID阅读器,可以跳过16个载波频率。阅读器放在离标签一米远的地方。在一个低和多路径场景中执行这个微基准测试。选择两个标签并绘制它们的相位序列,如图4所示。
在低多径情况下,对于这两个标签,相位序列在每个载波频率内保持稳定值,并且在从一个载波频率跳到另一个载波频率时线性变化。相比之下,在常见的多径情况下,这两个标签的相位序列变化不规则。具体地说,由于人体运动引起的动态多径效应,相位值会突然跳变,而在信道跳变过程中,由于来自所有路径的相位叠加,相位值会非线性变化。

(a) 低多径
2.3 算法实现

(5)
在这个方程中,如果所有的相位差值都是相似的,ek将接近1。否则,ek将接近于零。接下来进一步定义了以下加权函数和新的逆相关滤波器,如式(6)。
(6)
其中,M是读取器位置的数目。这个加权函数的解释是直截了当的:位置k处的相位差熵越高,表明普遍存在多径的可能性越低,因此在该位置报告的相位测量对于最终全息图谱的生成应该具有更高的权重。
无MobiTag多径抑制和有MobiTag多径抑制的全息图谱,如图5所示。

采用多径抑制算法时,旁瓣明显减弱。此外,多径抑制后主瓣的波束宽度缩小到3 cm。
3 实验与评估
3.1 实验环境部署
MobiTag的硬件由两部分组成:RFID通信模块和运动控制器。所用设备均为商用设备。RFID阅读器为ImpinJ Speedway R420,两个定向天线和一组无源RFID标签组成射频通信模块。R420阅读器在UHF频段920.625-924.375MHz工作,编程可跳过16个频道。天线具有9dBi增益、70°仰角和方位角波束宽度。
MobiTag的软件是用Java语言实现的,运行在配备英特尔i5处理器和4GB RAM的笔记本电脑上。它通过低级读取器协议(Low-level Reader Protocol,LLRP)收集相位数据。
在本研究中进行了实地实验,以测量MobiTag在现实环境中两个不同位置的端到端性能。两个位置的平面图,如图6所示。

图6 位置示意图
在第一个位置,多个对象被放置在RFID标记的对象周围,以便生成多路径的流行环境。在第二个位置,将RFID标记的对象移动到一个相对开放的空间,在那里只有墙壁和桌子产生少量的多路径。这两个场景的快照,如图7所示。

(a) MobiTag示意图
在每个场景中,本研究在20本书的书脊上贴上无源RFID标签。
3.2 结果评估
在本研究中把Tagoram[11]和STPP[12],与MobiTag进行了对比。首先展示了每种算法在图书排序中的表现。把阅读器天线放在离书架一米远的地方,进行四组实验来测量实验中的差异。在每组中,重复实验五次,总共有100本书。成功率,如表1所示。
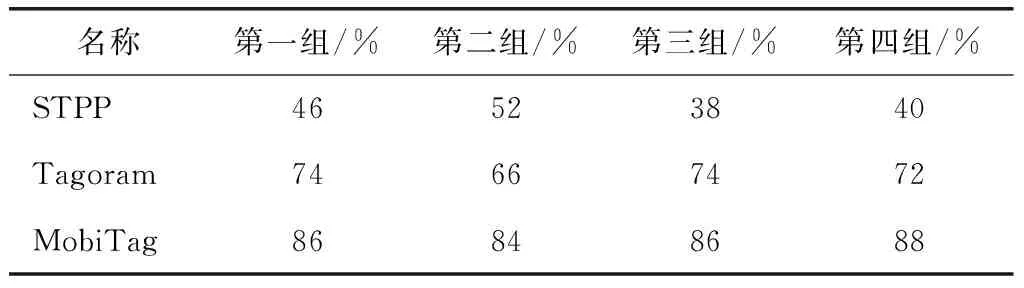
表1 不同算法在图书排序中的表现
从表中可知,MobiTag以84%的最低成功率确定了正确的图书顺序。相比之下,STPP和Tagoram的成功率分别高达52%和74%。这清楚地表明MobiTag比这些方案获得了更高的排序精度。然后将研究每种算法如何在不精确到一本书的情况下对书籍进行排序,如表2所示。

表2 3种算法对书籍的排序结果
由表2可知,在STPP中没有显著的精度改进。Tagoram的性能从平均72%略微提高到平均90%,而MobiTag在四个测试组中几乎达到了100%的准确性。
为了更好地理解MobiTag算法在图书排序方面优于其他两种算法的原因,在此分析了这三种算法的定位精度。如图8所示。

图8 三种方法的CDF示意图
图8显示了MobiTag、Tagoram和STPP中误差距离的累积分布函数(CDF)。STPP的中间误差距离为8.6 cm,第90个百分点为11.2 cm。STPP的最大误差为14.2 cm。这种较大的误差来源于室内热噪声和严重的多径效应。Tagoram优于STPP。在严重的多径环境中,它的平均误差为5.6 cm,第90个百分点为6.8 cm。最大误差距离为7.6 cm。Tagoram比STPP具有更高的准确度,因为它基于更稳健的定位方案。但是,由于以下原因,它未能达到与文献[11]中先前报告的结果相当的精度。实验环境中的桌子和书本等反射器会造成复杂的多径环境,破坏位置和相位读数之间的相关性。Tagoram没有明确处理多径效应引起的相位漂移。因此,在室内多径反射普遍且强的情况下,它会遇到一些实际问题。
MobiTag的平均误差为3.4 cm,分别比STPP和Tagoram高2.5倍和1.6倍。第90百分位误差为4.8厘米,最大误差为5.6厘米。这种改进是由于MobiTag能够处理多径效应带来的失真。与Tagoram相比,MobiTag通过使用多个频率来创建更多的虚拟天线。这些虚拟天线的全息图组合增强了真实位置,消除了假阳性位置。结合标签排序精度结果,可以看出,2.2cm的定位精度增益在应用于图书排序时会产生显著的排序精度增益。
4 总结
本文介绍了一种自动轮式机器人阅读器MobiTag的设计、实现和评估,该阅读器可以对图书馆进行自动化巡回管理,可以对图书馆的图书进行自动化的摆放,查找,定位。MobiTag提高了前沿的RFID定位系统检测和减小多径效应的能力。MobiTag完全建立在商用RFID设备上,具有易于操作的特性。基于现实环境的实验表明,在存在多径的情况下,MobiTag可以实现86%的精度。
猜你喜欢
电子设计工程(2022年15期)2022-08-17
英语世界(2020年10期)2020-11-06
英语世界(2020年2期)2020-03-08
数字通信世界(2019年3期)2019-04-19
中国交通信息化(2017年10期)2017-06-06
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
中国光学(2016年1期)2016-02-26
现代计算机(2015年17期)2015-09-26
发明与创新·中学生(2015年9期)2015-09-05
