基于耗散性理论的汽车底盘集成非线性鲁棒约束优化控制
2021-05-06 08:01张家旭施正堂
中国机械工程 2021年8期
张家旭 赵 健 施正堂 杨 雄
1.吉林大学汽车仿真与控制国家重点实验室,长春,1300222.中国第一汽车集团有限公司智能网联研发院,长春,1300113.浙江亚太机电股份有限公司智能汽车控制系统研究院,杭州,311200
0 引言
目前,自动驾驶电动汽车已经成为国内外汽车产业的主要发展目标之一,而主动前轮转向(active front steering, AFS)子系统和直接横摆力矩控制(direct yaw-moment control, DYC)子系统是保证自动驾驶电动汽车在自动紧急转向等极限工况下安全、稳定行驶的关键部件,但二者在自动紧急转向等极限工况下呈现出强耦合特性,简单组合的集成控制方式难以解决二者的强耦合特性对系统稳定性和控制性能的影响[1],因此深入研究二者在自动紧急转向等极限工况下的集成控制问题是一项具有实际意义的工作。
AFS子系统和DYC子系统的集成控制方法按照控制模型类型可划分为线性集成控制方法、非线性集成控制方法和智能集成控制方法。线性集成方法多采用线性二自由度汽车模型作为控制模型,并基于线性鲁棒控制方法设计AFS和DYC的集成控制器。例如:文献[2]将轮胎等效侧偏刚度作为线性二自由度汽车模型的不确定参数,并采用最优保性能控制方法设计AFS和DYC的集成控制器。文献[3]将线性二自由度汽车模型转化成线性分式变换结构控制模型,并采用鲁棒H∞状态反馈控制方法实现AFS和DYC的集成控制。文献[4]基于左互质分解线性二自由度汽车模型建立变结构内模鲁棒控制模型,并通过优化Youla参数化公式中的自由参数矩阵实现AFS和DYC的鲁棒集成控制。文献[5]以线性二自由度汽车模型的传递函数为基础,采用特征轨迹方法计算AFS和DYC的控制输入量,进而实现AFS和DYC的集成控制。在汽车自动紧急转向等极限工况下,线性二自由度汽车模型无法准确表征汽车实际的强耦合动力学特性,使得线性集成控制方法具有较大保守性。
非线性集成控制方法和智能集成控制方法对汽车自动紧急转向等极限工况下呈现出的强耦合特性具有更低的保守性。例如:文献[6]采用滑模控制方法计算校正汽车横摆角速度偏差和限制汽车质心侧偏角相轨迹运动区域所需的广义横摆力矩,并基于轮胎逆模型将广义横摆力矩转化为AFS和DYC的控制输入,实现AFS和DYC的集成控制。文献[7]采用非奇异快速终端滑模控制方法分别计算AFS的前轮转角控制量和DYC的横摆力矩控制量,并基于汽车质心侧偏角相轨迹稳定区域加权AFS的前轮转角控制量和DYC的横摆力矩控制量,实现AFS和DYC的协调控制。文献[8]将四轮车辆动力学模型作为控制模型,并采用非线性模型预测控制方法设计AFS和DYC的集成控制器,提高了汽车的操纵稳定性。文献[9]基于七自由度汽车动力学模型将AFS和DYC的集成控制问题转化成非线性最优控制问题,并通过Riccati方程求解该非线性最优控制问题。文献[10]将七自由度汽车动力学模型作为非线性模型预测控制方法的预测模型,设计AFS和DYC的集成控制器,最小化汽车横摆角速度和质心侧偏角跟踪误差,提高汽车的操纵稳定性。文献[11]采用模糊逻辑控制方法分别计算AFS的前轮转向角控制量和DYC的横摆力矩控制量,并基于模糊积分理论计算AFS的前轮转向角控制量和DYC的横摆力矩控制量的权重系数,实现AFS和DYC的集成控制。文献[12]基于多模型切换控制理论设计一系列AFS和DYC集成控制器,并采用模糊逻辑控制方法实现所设计的AFS和DYC集成控制器的平滑切换控制。虽然非线性集成控制方法和智能集成控制方法对汽车自动紧急转向等极限工况下呈现出的强耦合特性具有更低的保守性,但采用非线性集成控制方法和智能集成控制方法设计的汽车底盘集成控制器通常包含大量的待确定设计参数,需要借助专家经验来标定这些待确定设计参数,以实现预期的控制目标。本文基于耗散性理论设计了一种标定参数较少的非线性鲁棒控制器,以实现AFS和DYC的集成控制。
1 数学模型
简洁、高效的汽车动力学模型是汽车底盘集成控制系统设计的基础。忽略空气阻力和车身的纵向、垂向、俯仰和侧倾运动自由度,建立包含车身侧向和横摆运动自由度的汽车底盘集成控制模型,如图1所示。

图1 汽车底盘集成控制模型Fig.1 Integrated vehicle chassis control model
如图1所示,采用汽车质心侧偏角β和横摆角速度γ描述车身的侧向和横摆运动自由度,如下所示[13]:
(1)
(2)
(3)
式中,m为整车质量;Iz为汽车绕通过质心的垂直轴的转动惯量;vx为汽车纵向速度;Fx1、Fx2、Fx3、Fx4分别为左前、右前、左后和右后轮胎纵向力;Mu为校正横摆力矩;δf为前轮转向角;lf、lr分别为汽车质心到前轴和后轴的距离;tf和tr分别为前轮轮距和后轮轮距的1/2;Fyf、Fyr分别为前、后轮胎侧向力的均值;Fy1、Fy2、Fy3、Fy4分别为左前、右前、左后和右后轮胎侧向力。
将汽车底盘集成控制模型建模误差考虑成系统的加性不确定性,并且将汽车整车质量、汽车纵向速度等信息测量误差考虑成系统的乘性不确定性,则式(1)可以修正为
(4)
(5)
(6)
式中,d为系统的加性不确定性,d=[d1d2]T;未知参数θ为系统的乘性不确定性;Fy、Mz分别为汽车的侧向力和横摆力矩。
2 汽车底盘集成非线性L2增益控制
本节在Backstepping设计架构下,基于非线性鲁棒控制理论设计汽车底盘集成非线性L2增益控制律,抑制系统的加性不确定性对系统性能输出的影响。同时,借助投影修正法在汽车底盘集成非线性L2增益控制律中引入系统乘性不确定性自适应律,通过实时估计和补偿系统的乘性不确定性来抑制其对系统性能输出的影响,进一步降低系统的保守性。由AFS和DYC的集成控制目标,可得系统的性能输出为
(7)
βd=0
(8)
(9)
(10)
(11)
式中,z1、z2分别为质心侧偏角偏差和横摆角速度偏差;σ为滑模面;βd、γd分别为期望的质心侧偏角和横摆角速度;s为拉普拉斯算子;Kγ、Tγ分别为期望横摆角速度稳态增益和响应时间;Cf、Cr分别为前后轮胎等效侧偏刚度;l为汽车轴距。
考虑轮胎-地面附着条件约束,期望的横摆角速度进一步限制为
(12)
式中,μ为轮胎-路面附着系数峰值;g为重力加速度;ζ为式(12)简化过程产生的影响因子,本文取ζ=0.85。
在上述分析的基础上,我们通过李雅普诺夫稳定性理论得到以下定理。
定理针对式(4)描述的系统,设计如下汽车底盘集成非线性L2增益控制律:
(13)

采用如下自适应律更新:
(14)
式中,θmin、θmax分别为乘性不确定性的下确界和上确界;Projθ(·)为投影算子。
若选取的设计参数κ1满足
(15)
则闭环系统在加性不确定性d≠0时是有限增益L2稳定的;在加性不确定性d=0时其对应的闭环齐次系统是渐近稳定的。
证明:选择李雅普诺夫候选函数为
(16)
对式(16)求导,可得
(17)
将式(13)描述的汽车底盘集成非线性L2增益控制律和式(14)描述的乘性不确定性自适应律代入式(17),可得
(18)
根据Young不等式[14]可得
(19)
(20)
将不等式(19)和不等式(20)代入式(18),可得
(21)

(22)
对式(22)积分,可得耗散不等式

(23)

当系统的加性不确定性d=0时,对式(23)积分,可得
(24)

3 校正横摆力矩约束优化分配
AFS子系统和DYC子系统分别通过调节前轮侧向力和四个车轮纵向力对汽车施加校正横摆力矩。因此,由图1所示的汽车横摆力矩与四个车轮轮胎力之间的关系,可得
Mu=HΔu
(25)
H=
[2lfcosδflfsinδf-tfcosδflfsinδf+tfcosδf-trtr]
(26)
Δu=[ΔFyfΔFx1ΔFx2ΔFx3ΔFx4]T
(27)
式中,H、Δu分别为控制效率矩阵和目标轮胎力增量。
目标轮胎侧向力增量可以表示为
ΔFyf=-2CfΔα
(28)
式中,Δα为前轮侧偏角增量。
由线性二自由度汽车动力学模型可得汽车前轮侧偏角与前轮转向角之间的几何关系为
(29)
由于车身惯量远大于车轮惯量,使得车轮状态变化明显快于车身状态变化,因此,基于式(29)可将前轮侧偏角增量表示为
Δα=-Δδf
(30)
目标轮胎纵向力增量可以表示为
ΔFxi=ΔTbi/Rwi=1,2,3,4
(31)
式中,Rw为车轮有效滚动半径;ΔTb1、ΔTb2、ΔTb3和ΔTb4分别为左前、右前、左后和右后车轮制动力矩增量。
基于式(28)、式(29),将式(25)修正为
Mu=H1Δu1
(32)
H1=[4Cflfcosδf(lfsinδf-tfcosδf)/Rw
(lfsinδf+tfcosδf)/Rw-tr/Rwtr/Rw]
(33)
Δu1=[ΔδfΔTb1ΔTb2ΔTb3ΔTb4]T
(34)
式中,H1为修正后的控制效率矩阵;Δu1为由目标前轮转向角增量和目标车轮制动力矩增量组成的控制输入。
由AFS子系统和DYC子系统的动态响应特性约束,可得
|Δδf|≤Δδfmax
(35)
|ΔTbi|≤ΔTbmaxi=1,2,3,4
(36)
式中,Δδfmax和ΔTbmax分别为前轮转向角增量最大值和车轮制动力矩增量最大值。
为了最小化能量消耗,定义如下目标函数:
(37)
(38)
(39)

(40)
式中,W为权重矩阵;ε为修正因子,ε=10-4;Fz1、Fz2、Fz3和Fz4分别为左前、右前、左后和右后轮垂直载荷;μ1、μ2、μ3和μ4分别为左前、右前、左后和右后轮胎-路面附着系数;ρ为平滑过渡因子;χ为描述汽车稳定性的因子。
在式(37)描述的目标函数权重矩阵中引入平滑过渡因子,可以使AFS子系统主要工作在汽车质心侧偏角相平面稳定区域内。同时,汽车质心侧偏角相轨迹越靠近相平面稳定边界,AFS子系统的权重越大,使得AFS子系统和DYC子系统在提升汽车操纵稳定性方面由共同主导作用平滑过渡到仅DYC子系统起主导作用。
综上,将校正横摆力矩约束优化问题转化为如下的非线性规划问题:
(41)
采用逐步二次规划(sequential quadratic programming,SQP)法对式(41)描述的非线性规划问题进行求解。
4 仿真结果及分析
本节采用汽车动力学仿真软件CarSim构建模型在环测试系统,对所提出的汽车底盘集成非线性鲁棒控制器的可行性和有效性进行仿真验证。在仿真过程中,车辆参数与汽车底盘集成非线性鲁棒控制器参数配置如表1所示。

表1 车辆参数与控制器参数Tab.1 The parameters of vehicle and controller
4.1 调幅正弦转向工况
在调幅正弦转向工况中,汽车动力学仿真软件CarSim的路面附着系数设置为1,初始车速设置为120 km/h,前轮转向角输入如图2a所示,正弦频率设置为3.14 rad/s,调幅速率设置为0.447 °/s,未施加控制,DYC控制和集成控制的仿真对比结果如图2b~图2i所示。
如图2b~图2e所示,在系统存在加性不确定性时,未施加控制,DYC控制和集成控制的汽车均保持稳定行驶状态,但是未施加控制的汽车无法跟随期望横摆角速度,呈现出不足转向趋势,而DYC控制和集成控制的汽车可以准确跟踪期望横摆角速度。如图2f~图2i和表2所示,相对于DYC控制的汽车,集成控制的汽车需要的车轮制动力矩更小,对汽车纵向速度的影响更小。因此,本文提出的集成控制器既可以提高汽车操纵性,又可以抑制其对汽车乘坐舒适性的影响。

(a)前轮转向角输入 (b)汽车横摆角速度 (c)汽车质心侧偏角
(d)汽车质心侧偏角相轨迹 (e)系统加性不确定性 (f)汽车纵向速度

(g)未控制、DYC控制和集成 (h)集成控制的车轮制动力矩(i)DYC控制的车轮制动力矩 控制的前轮转向角图2 调幅正弦转向工况仿真结果Fig.2 Simulation results of sine increasing amplitude sine steering

表2 调幅正弦转向工况车轮制动力矩均值和方差Tab.2 The mean and covariance of brake torque in sine increasing amplitude steering
4.2 正弦延迟转向工况
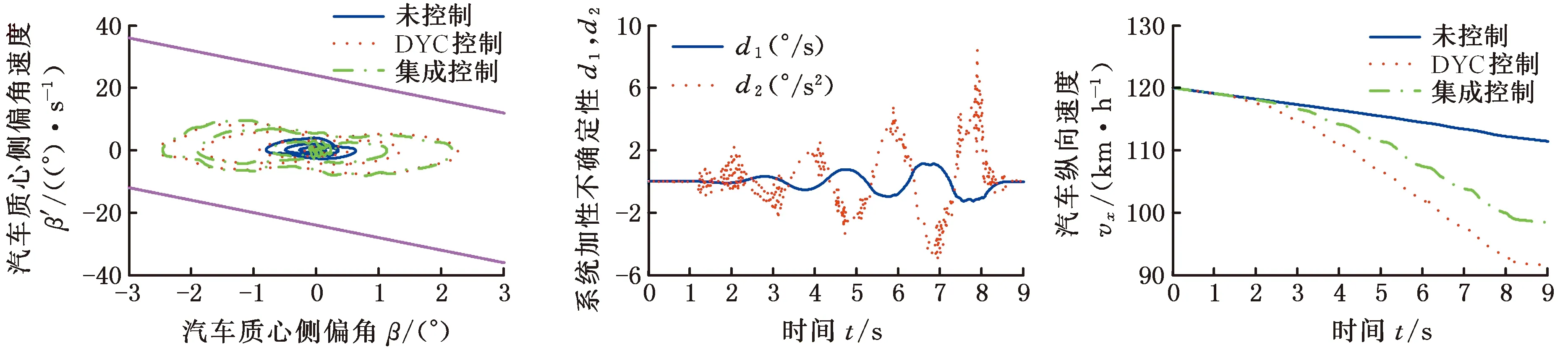
在正弦延迟转向工况中,汽车动力学仿真软件CarSim的路面附着系数设置为0.8,初始车速设置为100 km/h,前轮转向角输入如图3a所示,幅值设置为5.82°,未施加控制,DYC控制和集成控制的仿真对比结果如图3b~图3i所示。
如图3b~图3e所示,在系统存在加性不确定性时,未施加控制的汽车在1.3s后失去稳定性,呈现出过多转向趋势,而DYC控制和集成控制的汽车均保持稳定行驶状态,并且可以准确跟踪期望横摆角速度。同时,相对于DYC控制的汽车,集成控制的汽车对期望横摆角速度的跟踪精度更高。如图3f~图3i和表3所示,在正弦延迟转向工况中,汽车处于极限行驶状态,集成控制的AFS介入较少,但依然可以降低对车轮制动力矩的需求。因此,相对于DYC控制,本文提出的集成控制器既可以提高汽车操纵稳定性,又可以减小其对汽车乘坐舒适性的影响。
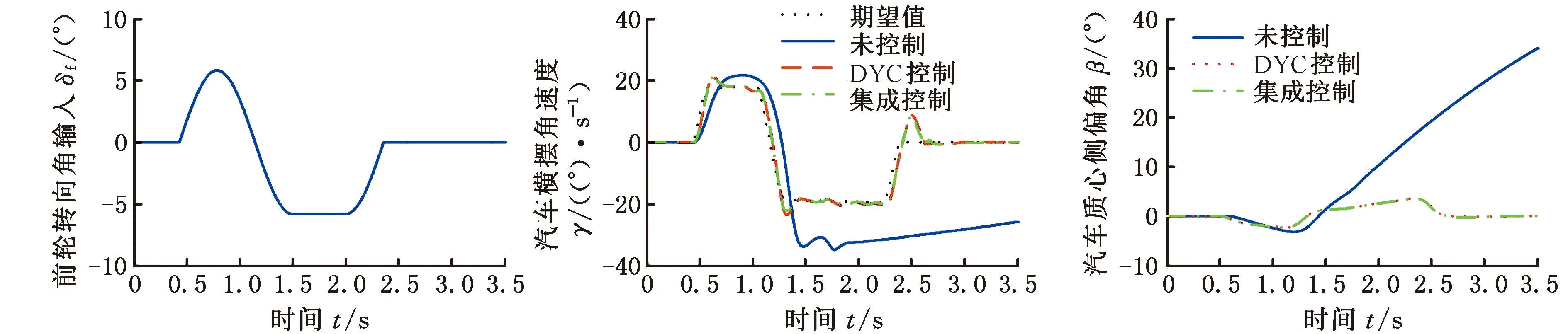
(a)前轮转向角输入 (b)汽车横摆角速度 (c)汽车质心侧偏角

(d)汽车质心侧偏角相轨迹 (e)系统加性不确定性 (f)汽车纵向速度

(g)未控制、DYC控制和集成 (h)集成控制的车轮制动力矩(i)DYC控制的车轮制动力矩 控制的前轮转向角图3 正弦延迟转向工况仿真结果Fig.3 Simulation results of sine dwell steering
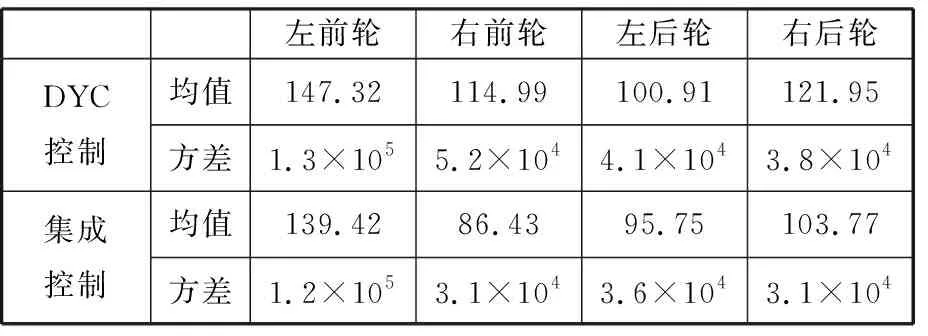
表3 正弦延迟转向工况车轮制动力矩均值和方差Tab.3 The mean and covariance of brake torquein sine dwell steering
5 结论
(1)将汽车底盘集成控制模型建模误差考虑成系统的加性不确定性,并且将汽车整车质量、汽车纵向速度等信息测量误差考虑成系统的乘性不确定性,建立了包含车身侧向和横摆运动自由度的汽车底盘集成控制模型。
(2)基于耗散性理论和投影修正法设计了汽车主动前轮转向子系统和直接横摆力矩控制子系统集成非线性L2增益控制律,抑制系统加性不确定性和乘性不确定性对系统性能输出的影响,并采用逐步二次规划法来实现了所设计控制律输出的校正横摆力矩约束优化分配。
(3)结合车辆动力学仿真软件对所设计的汽车底盘集成非线性鲁棒控制器的可行性和有效性进行仿真验证,结果表明:本文设计的汽车底盘集成非线性鲁棒控制器对系统加性不确定性和乘性不确定性具有强鲁棒性,既可以提高汽车操纵稳定性,又可以减小其对汽车乘坐舒适性的影响。
后续将搭建硬件在环试验平台,进一步验证所设计的汽车底盘集成非线性鲁棒控制器的可行性和有效性。
猜你喜欢
阜阳师范大学学报(自然科学版)(2022年1期)2022-04-02
装备制造技术(2021年4期)2021-08-05
系统管理学报(2018年3期)2018-08-13
系统管理学报(2018年2期)2018-08-13
现代工业经济和信息化(2016年22期)2016-08-23
红蜻蜓·低年级(2015年11期)2016-02-02
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
汽车维护与修理(2015年2期)2015-02-28
中国自行车·骑行风尚(2014年4期)2014-10-10
河南科技(2014年12期)2014-02-27