基于模糊控制-扰动观察法的光伏MPPT跟踪技术
2021-05-07 10:37高仕红马紫琬董岳昆
电工材料 2021年2期
汤 洋,高仕红,马紫琬,陈 谦,黄 京,董岳昆
(湖北民族大学 信息工程学院,湖北恩施 445000)
引言
目前,国内外能源危机日益突出,光伏发电技术因其无污染、干净等优点,成为国内外研究热点之一[1]。而光伏电池是光伏发电技术不可缺少的模块。如何保证光伏电池始终以最大功率点工作,对提高光伏发电效率、节约成本等具有重大意义。对此,国内外学者一直致力于研究光伏MPPT跟踪技术。
常用的光伏MPPT跟踪技术主要分为3种:恒定电压法、导纳增量法、扰动观察法等[2-4]。其中,基于扰动观察法的光伏MPPT跟踪技术其输出功率波动较大,工作效率低。导纳增量法不受系统环境的影响,但其跟踪效率低。恒定电压法原理简单,容易实现,但是其MPPT的跟踪精度低。对此,很多学者致力于研究改进型算法和智能型算法[5-7]。有学者设计了可以在线扰动优化光伏MPPT的模糊控制器[8]。该控制方法利用模糊规则建立控制策略,具有一定的自适应性。此外,有学者将基于神经网络算法应用到MPPT跟踪技术中[9,10]。经网络算法通过大量训练样本,使得P-V曲线的非线性特性问题得以解决,但是该方法需要大量数据,可靠性差。
本研究建立了光伏电池输出功率的数学模型,并将扰动观察法的简洁性与模糊控制法的自适应性相结合,提出基于模糊控制-扰动观察法的光伏MPPT跟踪技术,来解决MPPT跟踪精度低、自适应能力差的的问题。最后通过Matlab仿真软件,验证所提算法的可靠性。
1 光伏电池的数学模型
分析光伏电池的工作特建立数学模型,如图1所示。获取U-I间的关系,从而建立光伏电池输出功率模型。

图1 光伏电池等效电路模型
图1中及式(1)中的符号说明见表1。

表1 光伏电池等效电路模型的符号说明
根据节点电流法,可以得到

根据式(1),求解可得光伏电池的输出特性方程为:

实际上,参数Iph、Is、Rs、Rsh、A容易受外界因素的干扰,因此需要对光伏电池的输出特性方程进行简化。由于Rsh>>Rs,则有Iph≈Isc,UD≈U。对此,光伏电池的简化数学模型可以表示为:

式中:Im为等效模型的最大输出电流,A;Isc为等效模型的短路电流,A;Um为等效模型的最大输出电压,V;Uoc为等效模型的开路电压,V。
C1、C2表示修正系数。根据简化后的数学模型,求解光伏电池的输出功率模型P,具体如下:

2 基于模糊控制-扰动观察法的光伏MPPT跟踪技术
2.1 建立模糊控制-扰动观察法的仿真模型
利用仿真软件,搭建模糊控制-扰动观察法的模型,如图2所示。
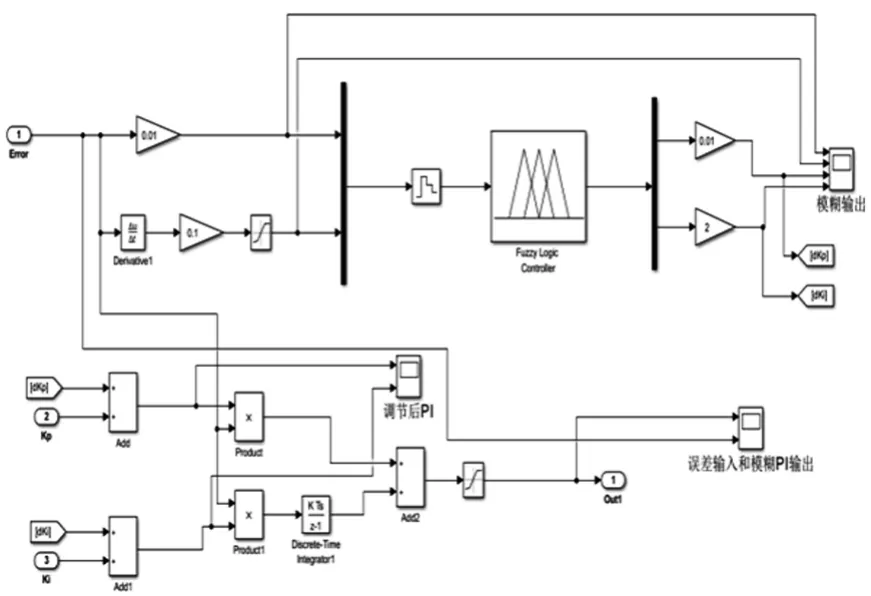
图2 模糊控制-扰动观察法的光伏MPPT模型
(1)确定光伏MPPT模型的输入输出。通过搭建的模型,确定输入输出。实际中,模糊逻辑控制器存在误差,输入量的误差用e表示,误差变化率用Δe表示,其对应的求解公式如公式(5):

模糊控制器的控制变量是通过Boost电路的占空比D来决定的。设置输入量的误差e和误差变化率Δe的模糊论域为[-5,5],控制量均用7个模糊子集表示,具体如下:

(2)建立光伏MPPT模型的隶属函数。根据光伏电池特点,选择较为平缓的梯形三角函数的形状作为MPPT模型的隶属函数,具体如图3所示。

图3 隶属度函数的形状
(3)建立控制策略。
①当e>0,且Δe<0时,新步长增加不明显。此时,应该利用小扰动跟踪调节,通过降低电压保证功率能够向左移动;
②当e>0,且Δe<<0时,新步长为负值。此时,应该继续保持大扰动跟踪,通过降低电压,保证功率能够向左移动;
③当e>0,且Δe>>0时,新步长为正值,且增长明显,应该继续保持大扰动跟踪,应该增加电压,保证功率能够向右移动;
④当e>0,且Δe>0时,新步长增加不明显。此时,输出值已接近最大功率点,通过采用小步长跟踪调节,保证功率能够向右移动;
⑤当e=0时,新步长不变化,输出值即为最大功率时的电压,不需要调节电压。
3 PWM模块及Boost变换器
3.1PWM模块
PWM模块的作用为:把MPPT控制模块的输出值转换为输入量。PWM模块如图4所示。
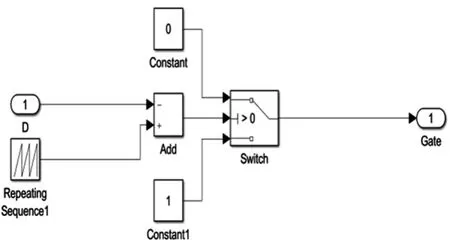
图4 PWM模块
3.2 Boost变换器
图5为Boost变换器的仿真电路。其中,Vg表示输入直流电源;U0表示输出电压。

图5 Boost变换器的仿真模型
输入电压与输出电压间的关系为:

4 基于Matlab/Simulink的MPPT算法仿真比较
对所提出的跟踪技术进行仿真,仿真模型如图6所示。

图6 仿真模型
为了验证所提出的跟踪技术的可靠性,对扰动法的光伏MPPT跟踪技术进行了仿真。两种跟踪技术的实验条件均相同。其中,光照强度:1 000 W/m2;环境温度:25℃。设置两种方法的仿真时间为0.4 s。图7为两种方法下的光伏MPPT模型的输出电流对比图;图8为两种方法下的光伏MPPT模型的输出电压对比图。
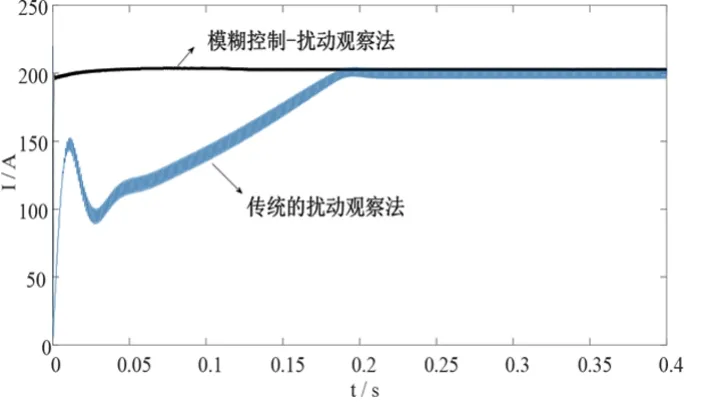
图7 光伏电池输出电流对比图

图8 光伏电池输出电压对比图
从仿真结果可知,采用传统的扰动观察法,输出的电流、电压的振荡幅度较大,此方法受振荡的影响;采用模糊控制-扰动观察法的MPPT控制方法输出的电压、电流基本上不受振荡的影响。
通过建立的数学模型,采用上述两种方法进行仿真,将两种方法进行对比,如图9所示。

图9 光伏电池输出功率对比图
采用传统的扰动观察法需要经过0.2 s,才使得光伏MPPT模型的输出功率趋于稳定,稳定后的输出功率波动范围为[5.4×104,6.5×104](单位为W),而且此方法的输出功率振荡特征明显;而采用模糊控制-扰动观察法的MPPT控制方法仅需0.592×10-3s,就能保证光伏MPPT模型的输出功率趋于稳定,稳定后的输出功率波动范围为[5.983×104,5.997×104](单位为W)而且此方法的输出功率基本上不受振荡的影响,极大地缩小了搜索到最大功率点附近的跟踪时间,具有更好的自适应性。
5 结论
研究所提出的算法跟踪精度高,能准确跟踪点MPPT,受振荡的影响较小,且自适应能力强,提升系统的运行效率。
猜你喜欢
河北理科教学研究(2020年2期)2020-09-11
作文成功之路·小学版(2020年1期)2020-03-03
新校长(2018年7期)2018-07-23
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
中国学术期刊文摘(2016年2期)2016-02-13
西北工业大学学报(2015年1期)2016-01-19
电测与仪表(2015年11期)2015-04-09
电测与仪表(2014年20期)2014-04-04