
一种基于干涉型光纤振动传感器的信号处理方法
2021-05-21 02:14李开心
复旦学报(自然科学版) 2021年2期
李开心,肖 倩,贾 波
(复旦大学 材料科学系 上海 200433)
振动参量在安全领域具有普遍性和重要性而备受研究者青睐[1-3].对基础设施和重要基地中异常事件进行有效预警定位可将生命财产损失降低到最小程度.同电子传感器相比,分布式光纤振动传感器具有连续性监测、抗电磁干扰和维护成本低等独有优点.分布式光纤振动传感技术主要包括光时域反射技术(Optical Time Domain Reflectometry, OTDR)[4-5]和干涉型光纤振动传感技术[6-7].OTDR应用范围受限于动态范围和空间分辨率的矛盾关系,而干涉型光纤振动传感技术具有结构简单、灵敏度极高和传感距离远等优势被广泛用于监测长距离动态振动信号.
干涉结构和信号处理均是干涉型光纤振动传感系统的关键技术,前者利用相位调制原理生成干涉输出信号,后者通过数据分析处理实现振动检测和定位.Sagnac干涉仪具有结构互易性但传感环路尚存在应用弊端,如环中点无法定位、需屏蔽一半长度光纤和长距离敷设有限等.连接法拉第旋转镜将Sagnac干涉仪中环型结构设计成直线型结构,不仅能有效解决原有应用弊端而且能抑制偏振衰落[8-9].传统定位方法通过快速傅里叶变换进行频谱分析,根据频谱上零频点确定扰动位置[10].
本文提出一种基于波分复用的双Sagnac干涉结构和相应信号处理方法.运用波分复用技术生成稳定抗干扰的干涉信号,解调后信号经延时或超前处理高效提取固定时延.该系统具有干涉稳定、结构多变和算法简单实用等特点.
1 理论分析
1.1 结构原理
基于波分复用(Wavelength Division Multiplexing, WDM)的双Sagnac光纤振动传感器结构如图1所示,该结构中光器件主要包括宽谱超发光二极管(Super Luminescent Diode, SLD)光源、波分复用器、耦合器、法拉第旋转镜和光电探测器.所用的耦合器1和耦合器2是3×3均分耦合器,耦合器3和耦合器4是2×2均分耦合器.不同波长的Sagnac干涉仪共用连接在2个波分复用器公共端之间的MN段传感光纤,其中P为扰动点.
图2是图1中不同波长的Sagnac干涉仪等效图.光源发出的光束经波分复用器1分光后经耦合器1和耦合器2分别进入2个直线型Sagnac干涉结构.光经耦合器1均分后,其中一束光经延时光纤1到达耦合器3,另一束光直接到达耦合器3.从耦合器3出来的光依次经过波分复用器2.MN段传感光纤和相距较远的波分复用器3,再经法拉第旋转镜2反射回到耦合器1发生干涉.同理,光经耦合器2均分后,其中一束光经延时光纤2到达耦合器4,另一束光直接到达耦合器4.从耦合器4出来的光依次经过波分复用器3.NM段传感光纤和相距较远的波分复用器2,再经法拉第旋转镜1反射回到耦合器2发生干涉.

图1 基于波分复用的双Sagnac干涉仪结构Fig.1 Structure diagram of dual-Sagnac interferometer based on WDM

图2 不同波长的Sagnac干涉仪等效图Fig.2 Equivalent representation of Sagnac interferometers with different wavelengths
设光在第1个直线型Sagnac干涉仪的工作波长为λ1,相干光传输路径为:
Ⅰ: A-B-C-MN-E-NM-D-F;Ⅱ: A-B-D-MN-E-NM-C-F;Ⅲ: A-B-C-MN-E-NM-C-F;Ⅳ: A-B-D-MN-E-NM-D-F.
光在第2个直线型Sagnac干涉仪的工作波长为λ2,相干光传输路径为:
Ⅴ: A-G-H-NM-J-MN-I-K;Ⅵ: A-G-I-NM-J-MN-H-K;Ⅶ: A-G-H-NM-J-MN-H-K;Ⅷ: A-G-I-NM-J-MN-I-K.
根据等光程相干原理,对于波长为λ1的Sagnac干涉结构只有经光路Ⅰ和光路Ⅱ传输的光在耦合器1中发生干涉,而对于波长为λ2的Sagnac干涉结构只有经光路Ⅴ和光路Ⅵ传输的光在耦合器2中发生干涉.因此,光在不同波长的Sagnac干涉仪中经过相互独立的传输光路发生稳定干涉.
1.2 定位原理
假设在传感光纤上P点施加时变扰动,光电探测器1检测到波长为λ1的干涉信号为:
(1)
(2)
式中:E1,E2为相干光幅值;Δφ1(t)为扰动引起波长为λ1的Sagnac干涉结构中相位变化;φ1和φ2为耦合器1引入的初始相位.
同理,光电探测器2检测到波长为λ2的干涉信号为:
(3)
(4)
式中:E3,E4为相干光幅值;Δφ2(t)为在同一扰动下引起波长为λ2的Sagnac干涉结构中相位变化;φ3和φ4为耦合器2引入的初始相位.
根据相位调制原理,相干光经过扰动点时均被调制2次.由于光到达扰动点的时间不同而形成相位差,解调后相位信号为:
Δφ1(t)=[φ(t-τd-τ1)+φ(t-τd-τ1-2τ2)]-[φ(t-τ1)+φ(t-τ1-2τ2)],
(5)
Δφ2(t)=[φ(t-τd-τ2)+φ(t-τd-τ2-2τ1)]-[φ(t-τ2)+φ(t-τ2-2τ1)].
(6)
式中:τd=nLd/c;τ1=nL1/c;τ2=nL2/c;n为等效光纤折射率;c为真空中光速;Ld为延时光纤长度(延时光纤1,2等长);L1和L2分别表示从M、N端到P点的距离.
解调后相位信号均由2个具有时延的子信号叠加构成但不具有直接相关性.需经适当处理数据获得一组具有固定时延差的重组信号,通过互相关算法提取固定时延后可快速解算出扰动发生位置.信号处理算法框图如图3所示.

图3 信号处理算法框图Fig.3 Block diagram of the signal processing algorithm
令θ(t)=φ(t-τd)-φ(t),τ0=τ1+τ2,将式(5)和(6)转换为:
Δφ1(t)=θ(t-τ1)+θ(t-τ2-τ0),
(7)
Δφ2(t)=θ(t-τ2)+θ(t-τ1-τ0).
(8)
由式(7)和(8)可得:
Δψ1(t)=Δφ1(t)-Δφ2(t-τ0)=θ(t-τ1)-θ(t-τ1-2τ0),
(9)
Δψ2(t)=Δφ2(t+τ0)-Δφ1(t)=θ(t+τ1)-θ(t+τ1-2τ0).
(10)
由式(9)和(10)可知Δψ2(t)=Δψ1(t+2τ1),即Δτ=2τ1.
根据互相关算法[11-12]确定扰动点位置:
L1=cΔτ/2n.
(11)
2 实 验
2.1 仿真测试
对该分布式光纤振动传感器提出的定位算法进行仿真验证.运用高斯单脉冲模拟振动信号,其中心频率为400 Hz、幅值为4 V以及脉冲信号时间间隔为0.01 s.此外,利用标准差为0.05的高斯白噪声模拟信号的背景噪声.信号处理系统的采样率设置为500 kS/s.在总长度为50 km传感光纤上10 km附近引入高斯单脉冲模拟扰动源,仿真测试中原始信号到互相关的信号处理过程如图4所示.其中,图4(a)是光电探测器接收的干涉信号;图4(b)是解调后相位信号Δφ1(t),Δφ2(t);图4(c)是通过式(10)和(11)处理后得到的重组信号Δψ1(t),Δψ2(t);图4(d)是重组信号互相关结果.由图4(d)互相关算法获取固定时延Δτ=95.77 μs,由式(11)可得仿真定位结果L1=9.96 km,绝对误差为-40 m,相对误差为-0.4%.

图4 10 km处模拟振动定位的信号处理Fig.4 Signals processing of simulated vibration localization at 10 km
将图4(a)中原始信号解调得到携带有振动源位置信息的相位信号,由图4(b)可知2个相位信号的幅值变化趋势相同但不具有直接相关性.经图3中简单的延时和超前处理后重构成一组具有固定时延差的高相似性信号.图4(c)验证了上述特征信号时延处理方法的有效性,从图中可明显看到重组信号具有固定时延,这有利于提高时延估计的准确性进而改进干涉型振动定位系统的定位精度.互相关函数如图4(d)所示,依据峰值对应时间横坐标提取固定时延差,再运用式(12)解算出振动发生位置.在长度为10 km传感光纤附近进行仿真测试,其结果表明该传感系统在理论上能检测和定位外部振动信号.
为了充分验证针对该系统提出的定位方案是否有效,在50 km传感光纤上从0 km开始以5 km的步进值增加到45 km,并在相应位置上分别通过相同振动源进行仿真测试,其仿真结果如图5所示.图5中仿真结果(d仿真定位)与振动实际位置(d实际位置)近乎一致,充分验证了该定位算法的有效性.而在实际应用中,振动变量比脉冲信号更复杂,因此有必要对该定位算法的实用性进行验证.
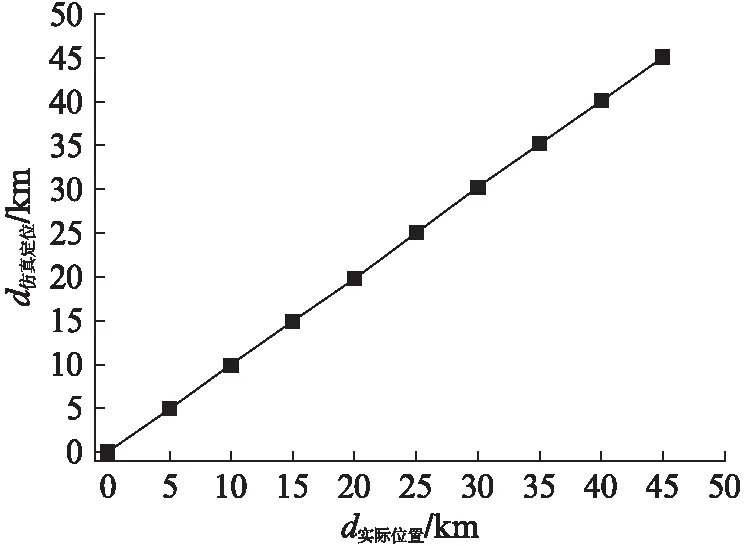
图5 仿真结果与振动实际位置对比Fig.5 Comparison of simulation results and actual vibration positions
2.2 人为扰动测试
按图1所示结构图搭建实验光路,采用分光为1 547~1 570 nm波段和1 520~1 543 nm波段的波分复用器以及均分光纤耦合器.在总长度为50 km传感光纤上10 km附近施加连续多次敲击扰动,人为扰动测试中原始信号到互相关的信号处理过程如图6所示.同理,图6中依次是光电探测器检测到的原始信号、解调后相位信号、时延处理后重组信号以及重组信号互相关结果.在人为扰动测试中测得固定时延Δτ=94.42 μs,由式(11)解算出定位结果L1=9.82 km,绝对误差为-180 m,相对误差为-1.8%.与仿真结果对比,人为扰动的振动信号相较于模拟振动在波形上表现出更多随机性,人为扰动测试下定位误差增加4倍左右,相对误差由0.5%增至2%左右.考虑到光学器件的非理想性、环境噪声以及人为扰动复杂性等客观条件,人为振动的定位性能不及仿真结果是必然的.

图6 10 km处人为扰动定位的信号处理Fig.6 Signals processing of artificial disturbance localization at 10 km
由于实验室现有光纤缠绕长度与10 km成倍数关系,在传感光纤上接近10、20、30、40和50 km处分别施加连续多次敲击扰动,手敲扰动定位结果与实际位置的如表1所示.由表中数据可知,在50 km 传感距离上人为扰动测得定位误差为±800 m,相对误差约为2%.在定位算法的有效性基础上,人为扰动测试的定位结果进一步验证了其实用性,在50 km传输距离上相对误差仅为2%,可满足应用工程中实际需求.

表1 人为扰动定位结果与振动实际位置对比
3 结 论
本文运用波分复用器改进了双Sagnac干涉结构,使光在不同波长的Sagnac干涉结构中经过相互独立的传输光路可发生稳定干涉;传感光纤连接在不同波长的Sagnac干涉仪之间,适当调整两个干涉仪的相对位置可满足实际应用中不同铺设需求;针对解调后特征信号提出了独特的信号处理方法,通过简单的延时或超前处理重构得到一组具有固定时间差的信号,再利用互相关算法可快速确定扰动发生位置.该定位算法不仅高效实用而且避免了传统频谱分析对振动频率的特定要求.测试结果与理论分析的一致性表明改进后双Sagnac干涉仪和相应提出的定位算法在长距离振动传感定位中具备有效性和实用性.
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
广东通信技术(2022年1期)2022-02-12
电子制作(2018年23期)2018-12-26
环球市场(2018年18期)2018-09-10
计量学报(2018年3期)2018-06-22
数字技术与应用(2017年12期)2018-02-28
中国新通信(2017年11期)2017-07-16
现代传输(2016年2期)2016-12-01
中国科技纵横(2015年7期)2015-12-01
