多波束测深系统在沉管隧道基槽回淤监测及边坡稳定性分析中的应用
2021-05-29 06:19陶振杰朱永帅成益品锁旭宏
中国港湾建设 2021年5期
陶振杰,朱永帅,成益品,锁旭宏
(中交一航局第二工程有限公司,山东 青岛 266071)
0 引言
深圳至中山跨江通道工程(以下简称“深中通道工程”)采用东隧西桥方案,项目路线起于深圳机场南,于中山马鞍岛横门互通。受长期采砂活动影响,深中通道工程西人工岛至矾石水道区域原始地貌已被改变,形成了一个巨型的采砂坑,该采砂坑水深普遍在-10 m以下(1985国家高程基准,下文高程基准均采用85高程),砂坑底部存在较厚流动性回淤物,其物理力学性能指标差,对基槽成槽可能造成严重影响。为此使用高质量的多波束测深系统对隧道基槽区域进行数据采集,同时使用多种分析方法对该项目隧道基槽数据进行合理分析,为今后的设计和施工提供合理参考数据。
1 多波束测深系统组成
多波束测深系统是由多传感器组成[1-3]。本工程所使用的多波束测深系统为挪威kongsberg公司生产的EM2040测深系统,基本的EM2040由4部分组成:甲板处理单元、发射换能器、接收换能器和工作站,还包括姿态传感器、定位系统和声速剖面仪,可以选择输入换能器表面的声速数据。具体组成如下:Kongsberg EM2040 1°×1°单条带多波束测深仪、POSMV Oceanmaster惯导系统、AML BASE X2声速剖面仪、AML Micro-X表面声速仪、UPS不间断电源及采集电脑、数据采集qinsy和控制软件SIS及数据后处理软件Qimera、Trimble R9S一套。
2 多波束测深系统质量
EM2040多波束测深仪是全球第一套把深水多波束优点应用到浅水多波束的系统,最大ping率为50 Hz,满足IHO-S44 special测量标准。
EM2040多波束测深仪的主要特征如下:每个ping双条带,加倍了测量速度、FM chirp技术测深范围更大、波束具备roll、pitch、yaw稳定、发射和接收都具备近场聚焦功能、EM2040的工作频率为200~400 kHz,有3种标准的工作模式。通常是300 kHz模式,优化并兼顾了测深能力和分辨率。在这种模式下,使用的带宽超过75 kHz。每个发射扇面被分成3个扇区,发射频率各不相同,在双条带模式下,频率可达6个。最小脉冲长度大约35μs。斜距分辨率为3 cm,再加上运用成熟的Kongsberg海底检测算法,深度分辨率可达厘米级。
2.1 多波束测深系统校准及校正比对
2.1.1 系统的校准
系统的校准(或称标定)是多波束测量作业的最关键环节,它直接影响最终的测量成果。因此系统的校准必须严格按厂方技术人员的要求进行。其中包括:各传感器之间的相对位置关系标定;姿态校正,包括定位时延、roll(横摇)、pitch(纵摇)、heading(艏向)4种姿态的校准。
1)各传感器之间的相对位置关系标定
一般情况下,以水面为零点,使用全站仪测量出各传感器之间的相对位置坐标,标定参数主要有:TX(发射换能器)中心距零点的相对位置、RX(接收换能器)中心距零点的相对位置、IMU(惯导系统)中心距零点的位置、定位天线相位中心距零点的相对位置。
根据JT/T 790—2010《多波束测深系统测量技术要求》[4]中6.2.6章节规定:系统各配套设备的传感器位置与测量船坐标系原点的偏移量应精确测量:读数至1 cm,往返各测1次,水平方向往返测量互差应小于5 cm,竖直方向往返测量互差应小于2 cm,在限差范围内取其平均值作为测量结果。
2)姿态校正
由于本工程主要测深区域位于浅水区域且使用RTK定位无验潮模式,因此这里主要对横摇、纵摇、艏向3种姿态进行校准。
横摇:在平坦区域,同一测线,做同速反向测量。
纵摇:斜坡或突出的目标上,同一测线,做同速反向测量。
艏向:斜坡或突出的目标上,2条平行测线,做同速同向测量,测线之间有1/3~1/2个条带的覆盖。
根据《多波束测深系统测量技术要求》[4]中6.2章节规定:横摇应取3组或以上数据计算校准值,中误差应小于0.05°,纵摇应取3组或以上数据计算校准值,中误差应小于0.3°,艏向应取3组或以上数据计算校准值,中误差应小于0.1°。
2.1.2 系统校正比对
根据《多波束测深系统测量技术要求》[4]中规定在系统校准后多波束测深系统在测深作业前需进行综合测深误差的测定,其中综合测深误差的测定大体分为内符合测试和外符合测试两种。
1)内符合
内符合通俗来讲就是多波束测深系统的一个自检符合,通过这个检核可以测试出系统自身在各传感器之间的相对位置关系标定、姿态校正、七参数键入等方面是否存在问题。具体操作方法为:选择一块水深大于施工测区内最大水深的平坦水域,同一区域按正交方向测量2次,比对2次测量重叠部分水深数据,不符合极限误差的数据不能超过参与比对总数据的15%。水深≤30 m的水域,精度应满足表1中特等测量要求,水深>30 m的水域,精度应满足表1中一等至三等测量要求。
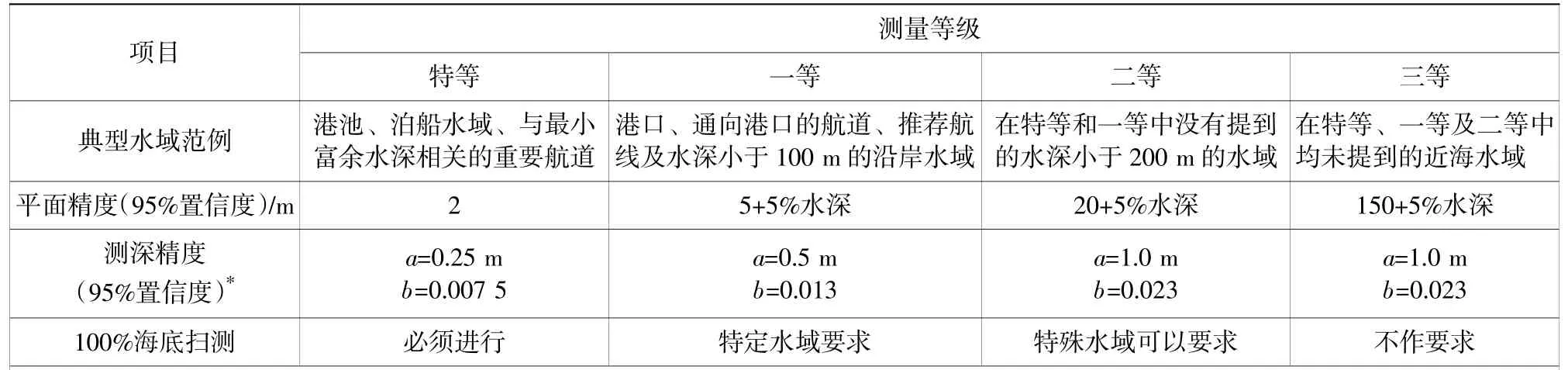
表1 多波束测深精度要求Table 1 Multi-beam sounding accuracy requirements
EM2040多波束测深系统通过内符合自检数据精度,测试地点选择在伶仃至隧址段航道中段东侧区域,跑正交线进行内符合测试,查看数据衔接情况,删除假水数据,使用Hypack软件把2次按正交方向扫测的数据进行tin建模,差值生成色块图进行统计分析,结果见表2。
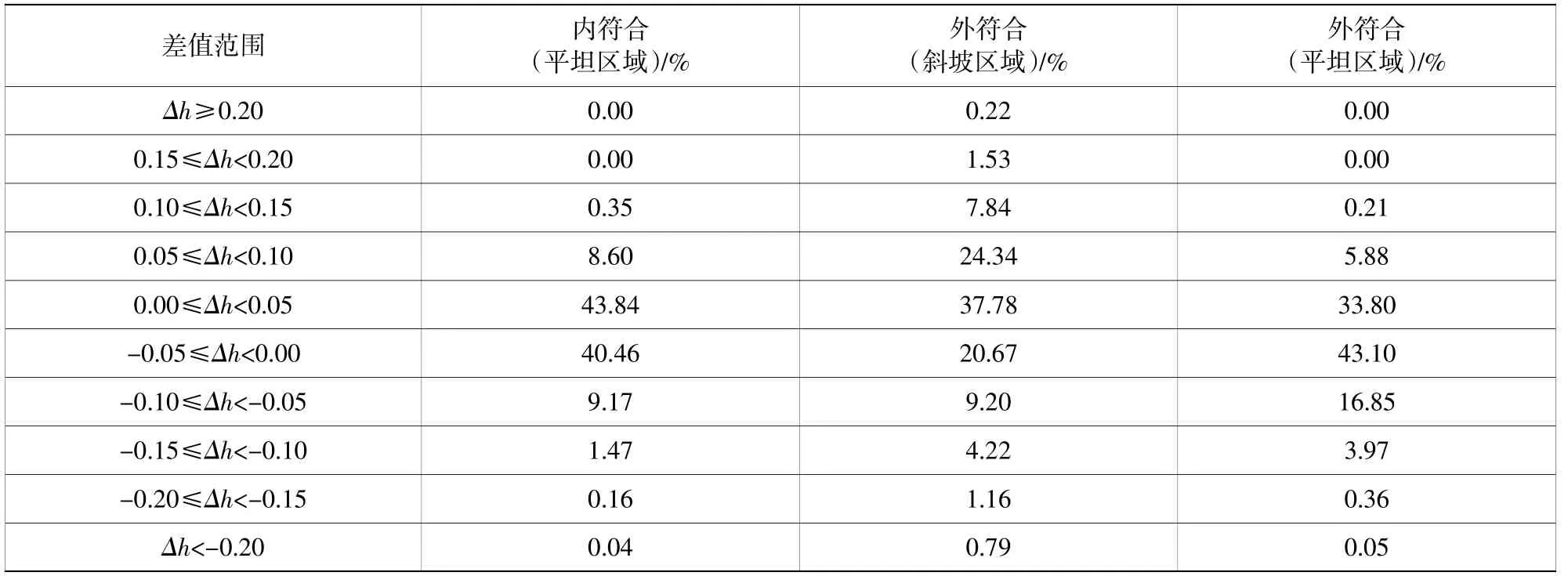
表2 差值分析表Table 2 Difference analysis table
2)外符合
外符合是多波束测深系统的一个外部检核,通过这个检核可以测试出系统的相对误差。具体操作方法为:选择一块水深大于施工测区内最大水深的平坦水域,采用单波束测深仪(测深精度已校准且优于规定精度)对系统进行水深精度比对,比对不符合极限误差的数据不能超过参与比对总数据的15%。
EM2040测深系统由于现场未找到符合规范要求的单波束测深仪,但现场有另一台经过校正比对且测深精度优于规定精度的EM2040测深系统,具体操作如下:使用2套多波束测深系统对同一平坦区域和同一斜坡区域进行水深测量,其中检测多波束系统在后处理中取其中央波束同被检测多波束系统扫测数据进行比对,使用Hypack2011软件把2次扫测的数据进行tin建模,并将差值生成色块图进行统计分析,结果见表2。
2.2 多波束测深系统影响数据采集质量的主要因素
多波束测深系统影响数据采集质量的因素有很多,从仪器的安装到系统的校准,再到数据采集,最后的数据处理。
实际操作中,需要注意的最主要的因素还是仪器的安装,尤其本工程多波束测深系统属于船底式安装方式,每一次安装和拆卸都需要上坞进行作业,费时费力费钱。而其他的因素:系统的校对、数据采集、数据处理等过程进行系统误差改正相对简单。系统安装的好坏直接影响后续工作的进行,如:安装位置最好在船体的1/3处,因为此处的噪音和产生的气泡对仪器的影响最少;系统各设备之间的相对位置关系标定应准确测量,其标定精度直接影响多波束测深精度,因为后续的软件参数键入均以其标定数据为依据。
3 基槽回淤监测方法
3.1 回淤量计算法
将处理好的多波束扫测数据生成.xyz格式,导入到Cass中生成相应的水深图,使用Cass或者FastTFT软件分别计算出基槽各区域每期测量剩余工程量。前后二次数据比较可得此间基槽槽内沉积物淤积厚度,通过长期监测,可以得到各个时间段沉积物回淤厚度及回淤强度。
3.2 色块图比对法
色块图比对法相对于回淤量计算法来说,可以直观地分析出不同区域部位的回淤厚度,进行专项的分析处理。首先将前后2次的测量数据生成.xyz,导入到国际通用的海洋Hypack软件进行tin建模,对tin最大边长及生成的tin×tin的边长进行编辑,将两期数据相同的部位进行差值计算;为了更直观、方便地分析判断,同时对不同的差值范围进行颜色定义,最终输出DXF格式的差值色块图。
4 基槽边坡稳定性分析
4.1 断面图分析法
多波束测量属于全覆盖海量数据测量,建立DTM模型比较符合实际地形[5-9],前后断面可比性较好。利用多次多波束跟踪测量的数据,对各期的数据断面线进行比较,以分析与判断边坡的稳定性。
采用国际通用的海洋测量Hypack软件进行数据处理分析,将各期扫测数据进行tin建模,做出监测区域每期数据断面,将断面叠加比较分析,可以有效地判断分析出边坡的变化情况。
其中2020年7月3日为首期验收的边坡数据,2020年8月19日为监测数据,通过叠加横切断面图可以判断出边坡的稳定性,边坡上总体稳定,均未出现明显滑坡、变形现象,断面呈台阶状仍然明显。
4.2 三维图比对法
多波束测量属于全覆盖海量数据测量,利用Qimera软件将采集的.db原始数据文件生成海底地形三维图,通过不同时间段生成的三维图像进行对比,可掌握基槽开挖后整体随时间变化情况,可以大体判断出边坡的变化情况。
5 结语
多波束测深系统在沉管安装基槽回淤监测及边坡稳定性分析中的应用对沉管沉放安全对接起着至关重要的作用。在实际应用中,港珠澳大桥岛隧工程沉管隧道E15安装期间,EM2040多波束测深系统通过三维图对比法及时发现基槽边坡滑坡、槽底出现大面积回淤等状况,回淤量计算法、色块图对比法等分析方法为安装决策提供重要的数据支持,对保障港珠澳大桥深水沉管隧道精确对接发挥了关键作用。
猜你喜欢
河北水利(2022年10期)2022-12-29
中国港湾建设(2022年12期)2022-12-28
山西建筑(2022年24期)2022-12-16
海洋通报(2022年4期)2022-10-10
海洋信息技术与应用(2022年1期)2022-06-05
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
中国港湾建设(2016年1期)2016-09-06
浙江国土资源(2015年4期)2015-05-09