数字电传控制系统故障机理分析与优化
2021-05-31 01:19巩亚龙
中阿科技论坛(中英文) 2021年5期
戴 迪 巩亚龙
(中国飞行试验研究院,陕西 西安 710087)
飞机的运行系统随技术的不断改进发展实现了由简单的人工机械系统到助力操纵系统。20世纪70年代,电传操纵系统问世,使用发出的电信号、设备开关及操作手柄驾驶飞机,对飞机空中的姿态和飞行轨迹进行控制。飞机在飞行中钢体结构会发生变化,为了提升飞机运行系统的操纵性能,研究者希望通过自动控制技术改善飞机运行系统,通过自动控制系统与电传操纵系统的结合来实现飞机操纵系统质的发展[1]。
1 飞机电传控制系统的原理与分类
目前飞机运行使用的电传控制系统与最早的人工机械操纵系统相比,在基础理论方面有着众多相似之处,也就是说飞机操纵系统始于原始的机械操纵。随着电子技术的进步和航空事业的快速发展,科研人员逐渐研究出高性能的电传控制系统。电传控制系统原理是将飞行员人工操作信号转换为电信号,电信号加上控制增稳操作系统极大地增强了飞机运行体统的性能。电传控制系统的划分主要是依据传感器的分类,目前我国发展阶段采用最多的飞机数字式电传控制系统是模拟式电传操纵系统(见图1)。

图1 俯仰通达组成图
2 机上上电常见故障
2.1 多种故障现象
在使用前对电传控制系统上电时,使地面电源车经过1号和2号飞机及动力系统Ⅰ、Ⅱ开关,这个过程容易出现多种上电顺序不同导致的异常出错情况,电传控制盒上会有几种现象:通道灯亮起1个灯,代表计算机单通道故障;亮起2个灯,表示计算机双通道故障;通道灯亮起4个,表示电传系统连接状态很有可能已经改变为刚性连接或者计算机由于故障处于异常暂停状态。
2.2 机上上电试验模拟
首先给实验对象供电,飞机及动力系统的1号开关和2号开关分别为K11、K12、K21、K22,用组合排列的方法对以上4个开关进行顺序和相差时间间隔的开关实验,给电传计算机进行多次上电,之前所述的故障都出现了。记录每组实验的1号和2号的应急汇流条上两端的电压。先按下K11/K21,将电压稳定在27V后,再按下K12/K22,此时,应急汇流条上出现断电故障维持了大约6.5ms;先按下K12/K22,也将电压稳定在27V后,再按下K11/K21,检测到应急汇流条上产生了电压波动故障持续约3ms,经检测这期间电压波动最大值在20V左右[2]。
3 故障系统机理分析
3.1 电传控制系统分析
图2所示电传控制系统的机上供电原理过程电路图中,A、B、C、D4台电传计算机都提供一条27V直流从飞机及动力系统的1号和2号应急汇流条进入系统装置。和外部供电源相连后,打开电传计算机装置,电流首先经过左、右主应急汇流条,后经以上4个开关和左、右直流配电保护装置形成电压稳定在27 V的供电回路。1号和2号飞机和动力系统的实验过程相同,为简化电路,单独使用1号直流配电装置进行上电试验。先按下K11开关,电流经过左直流应急汇流条、接触器J1常开端、接触器J2闭合端到达图中阴影部分的1号应急汇流条,形成回路,此时再打开K12开关,接触器J2触点会发生短暂转换,这个过程会造成KZB-8Z应急汇流条出现断电现象,持续约6.5 ms;实验第二种组合,将开关顺序颠倒过来,先打开K12开关,27 V电流经过右直流应急汇流条到接触器J2的常开端,最后还是经过KZB-8Z配电保护装置的应急汇流条,这时再按下K11开关,左直流主汇流条上的电荷负载突然增加会造成整个电流回路上的短暂电压波动。
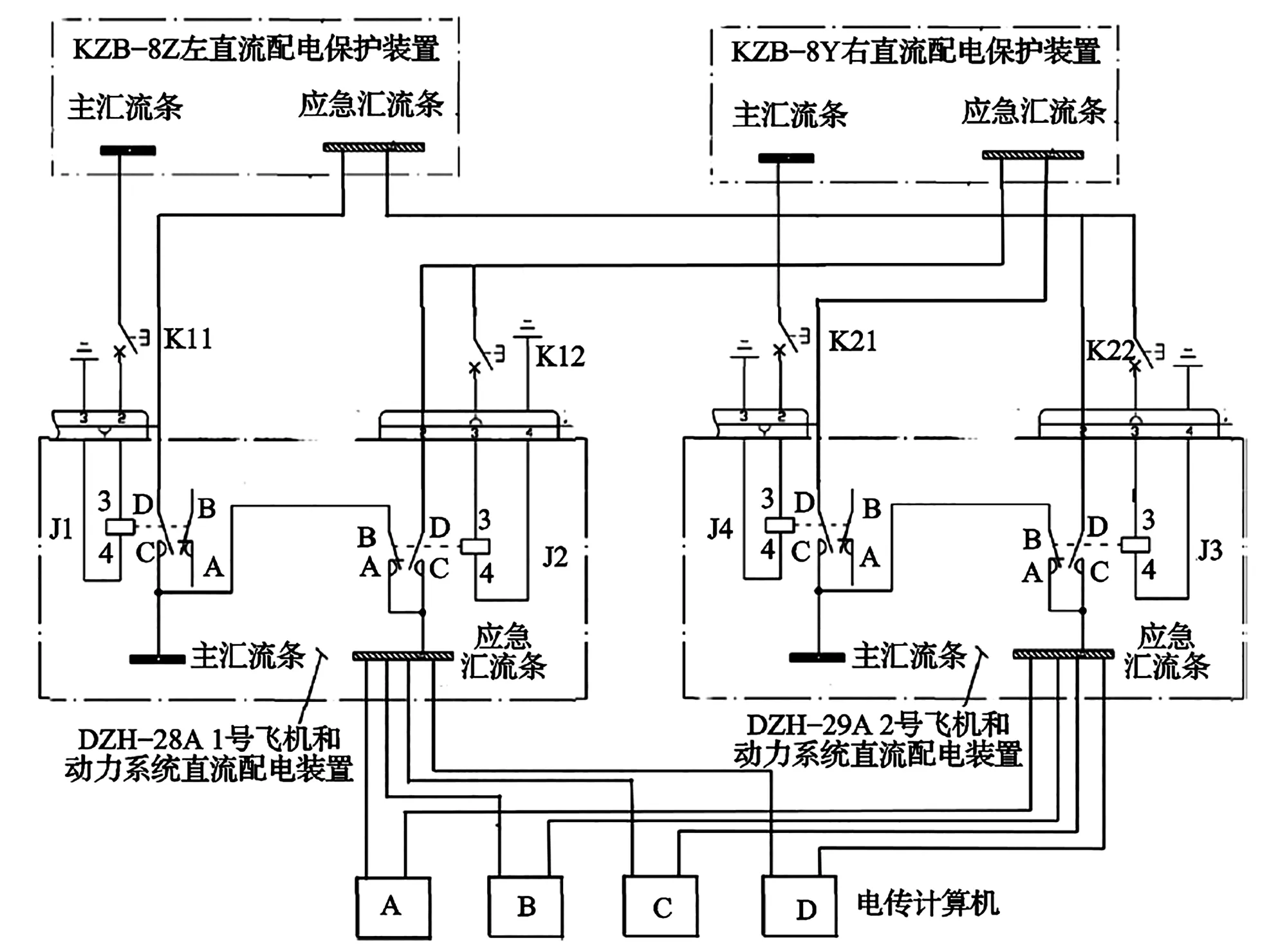
图2 电传计算机机上供电原理图
3.2 计算机二次电源
GJB181-86对B类用电设备抗欠压浪涌会造成50 ms掉电现象。为解决这一问题,可以在计算机输入电源入口安装一个储能电容器C1。
在产生50 ms掉电前,先给C1充电,抗住这一故障C1至少应充电:

计算结果显示,给C1正常供电16.6 s后,50 ms的掉电现象对计算机就不会产生影响。为保证正常供电,上述计算公式(2)中的V0选取17 V电压,VE选取26 V,作为充电电压为储能电容器C1提供能量。
3.3 计算机复位及和自检测
数字式计算机是此型号的电传控制系统属于四余度之一,受扰动后会造成信号改变,加电后可通过图3中复位线路对CPU执行复位操作,RESET状态下,在t0到t4时间内信号复位。
计算机上电自检测(PUBIT)是系统工作前CPU对计算机基础硬件设施进行必要的自动全面检查,如检查到不正常状态,则对电传计算机进行不能开始工作命令,PUBIT失败计算机就会处于“悬停”状态,不响应任何指令,复位操作不受影响可以执行,对通道故障逻辑检测也属于PUBIT检测的一项工作[3]。
在CPU供电电压达到5 V前,时钟信号也没有达到要求,至少要保持1ms的CPU复位操作,系统建立时钟信号需要15 ms,因此,为确保CPU复位指令操作成功,电传计算机上电复位脉冲时间最小持续16 ms。
图3 所示触发复位信号电路中,D1门槛电压为3.6 V,当VC2电压小于3.6 V时,输出RESET为高电平,高电平时对CPU进行复位;当VC2电压大于3.6 V时,复位脉冲信号结束;当VC2从初始电压充电到3.6 V了,复位过程完成,整个复位脉冲宽度。

图3 电传计算机上电复位信号产生及受扰动示意图

规定复位时间多于100 ms,是为了留出时间,在运行电传控制系统前将芯片程序烧到系统中进行其他功能操作,保障上电时CPU复位成功和系统的良好运转。
3.4 电源波动对计算机影响处理
计算机机上供电原理及机上加电测试结果表明:按1号配电装置的K12→K11或2号的K22→K21顺序上电,由于负载产生变化,1号或者2号的动力应急汇流条上会持续约3 ms的电压波动,测量的波谷电压在20 V左右;只要电源电压V0大于17 V,这种波动就不会影响电传计算机的正常工作,DC/AC电源模块就可以正常运行使用;按1号配电装置的K11→K12或2号的K21→K22顺序上电,相应的动力应急汇流条上会瞬间掉电,持续约6.5 ms;要抵抗住这6.5 ms的掉电,计算机的储能电容C1至少应为

由以上计算结果可以得出,只要按下1号和2号的两个开关之间的时间间隔大于8.24 s,计算机就可以完成上电工作,从而正常运行。但在实际车间中,地勤人员习惯性操作上电,同时扳动两个开关(K11/K12)或(K21/K22),无法区分先后顺序甚至没有时间间隔,就会很容易出现按K11→K12或K21→K22这个顺序打开开关,同时没有等待上电时间,造成6.5ms的掉电故障现象,掉电又接着引起5 V二次电源的电压波动,对电传计算机CPU工作产生不同程度的变化和影响。
(1)根据供电范围5±0.5 V,若5 V电源受扰后电压仍不低于4.5 V,则设备正常供电运行,REAET复位线路不产生复位信号命令,CPU无影响继续正常工作。
(2)若5 V电源受扰后,电压在2.86~4.5 V,则CPU停止运转还是无影响继续工作在理论上是无法确定的。若无影响,则CPU正常工作;若有影响,CPU会停止工作,进行通道逻辑故障检测。由于这时从t0到t4的复位脉冲时间小于16 ms,时钟信号和复位信号没有足够时间完成传输,引起数字计算机故障失效。
(3)若供电电压5 V受扰后,电压低于2.86 V,RESET复位电路会产生复位脉冲,由之前电传计算机上电的时间可知,复位脉冲宽度treset需要16 ms,满足16 ms后CPU便可以复位成功,重新启动;但是只有此时A、B、C、D4台电传计算机的CPU是同时重新启动这一种情况,电传计算机同步成功,那么系统重启以后才可以接着正常工作,其他情况均无法恢复正常。
4 结语
经过上述实验,对结果进行综合分析,电传控制系统机上上电过程需要有正确的上电顺序做保证。1号或者2号的飞机和动力系统配电装置的左手边开关先打开,即K11或K21先接通电路,给储能电容C1充电8.24 s后,再接通其他3个开关,这个顺序可保证正常上电。或者先接通右手边的开关,即K12在K11之前、K22在K21之前的这个顺序,然后再接通其他3个开关,也可保证计算机上电正常。最后,对于整个动力系统,应先打开2号的两个开关,再打开1号的两个开关。按照上述顺序上电,可保证计算机运行前进行PUBIT自检测,顺利进行正常工作状态。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
环球时报(2022-05-30)2022-05-30
大众科学·中旬(2020年6期)2020-06-29
山东工会论坛(2020年3期)2020-06-10
航空兵器(2020年6期)2020-01-25
当代陕西(2019年11期)2019-06-24
作文周刊·小学一年级版(2017年9期)2017-06-20
水利技术监督(2017年3期)2017-06-09
小学生导刊(低年级)(2016年8期)2016-09-24
智能建筑电气技术(2015年5期)2015-12-10