基于动力学性能的环板式针摆行星减速器间隙分析
2021-06-05 09:13杨秀双尹文敬
机械管理开发 2021年4期
杨秀双,尹文敬
(浙江大丰实业股份有限公司,浙江 杭州 310020)
引言
四环板针摆行星减速器由于其具有传动比大、承载能力强、传动效率高、传动平稳等优点,使得其在装备制造业中的应用越来越广泛。但随着现代齿轮传动对高速、重载、及运转平稳性要求的提高,对如何减少疲劳破坏、减轻振动噪声提出了更高的要求。运动副间隙作为影响动力学性能的一大因素,对机构的振动冲击所引起的破坏不容忽视。因此,研究间隙机构的动力学特性具有重要的理论和应用价值。为此,本文将以四环板针摆行星减速器(如图1)为主要研究对象,综合考虑各方面因素,建立了含间隙的动力学模型,为减小减速器的振动和噪声提供理论依据。

图1 四环板针摆行星减速器
1 动力学模型的简化
为了与动力学性能进行对比,先进行静态载荷分析。由于四片环板呈对称分布,所以仅取一片环板进行分析(如图2)。

图2 运动学分析模型
我们知道,各相互运动的运动副及关节间必然存在间隙,而间隙的存在将有可能会破坏理想的运动形式,并且会产生冲击和噪声。而冲击和噪声往往随着机构运动速度的增大而增大。
在这里,我们可以把曲柄孔处存在的间隙看成一个假想杆,那么如图2所示的四杆机构将变为五杆机构,其自由度F=(5-1)×3-5×2=2,由于是假想杆,故质量为零。用δB表示杆长,αB表示其位置角,则可以绘出考虑间隙的动力学简化模型(如图3)。其中,θ1=ωt,ω为曲柄转动的角速度。
图中:l1—l4、S1—S3、θ1—θ4分别表示各杆长度、质心及各杆图示方向与X轴正方向的夹角。
2 运动学方程的建立和求解
对以上假设等效的五杆机构暂设不存在运动副的分离,故也不存在冲击,则其矢量封闭方程为:

对方程求导,推出假想杆随曲柄位置角变化的关系如下:

式中:m1—m4、J1—J3分别表示各杆的质量及转动惯量,RA、RB分别为考虑间隙时A、B点的支反力,β为啮合角,Fn为啮合力,rp为基圆半径。
根据以上推导,计算并绘制结果图形,得出有、无间隙时的支反力RB的大小(如图4)。
从图表中我们可以看出,在不考虑间隙的情况下,支反力大小变动连续且变动幅度范围很小。
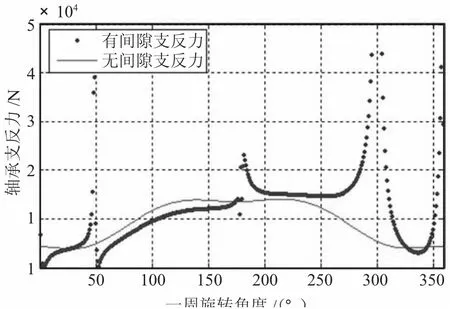
图4 有、无间隙时支反力对比
但在有间隙的条件下,机构的支反力主要在5°、48°、180°及300°附近发生突变,有的位置的支反力的大小是平时的2倍以上。而支反力发生突变时系统也极有可能发生冲击碰撞,从而产生噪声。
根据文献[4],当|α"B/R|>1时,曲柄将在此位置角度发生脱离,从而有可能产生冲击和噪声。
根据上述推导,绘制曲柄旋转一周内旋转角度与判定条件|α"B/R|的数值关系,如图5所示。
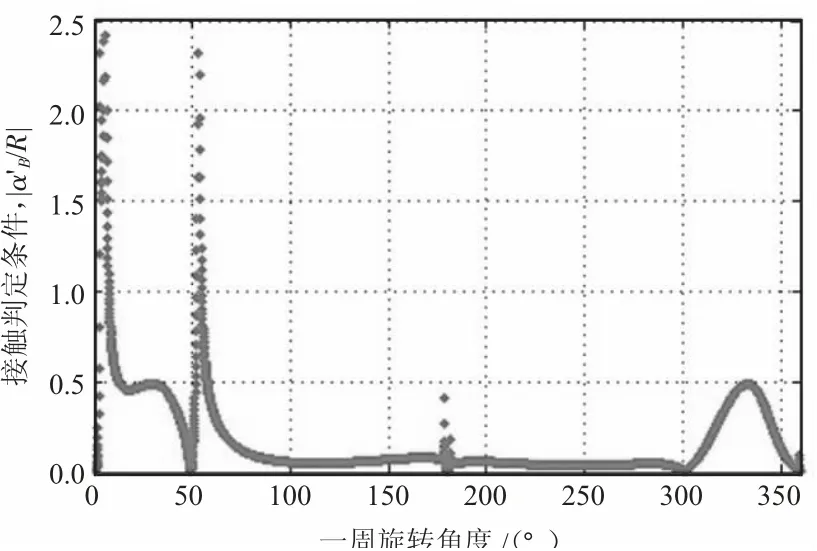
图5 接触判定条件随曲柄角转动的变化曲线
3 结论
1)根据判定条件随曲柄角转动的变化曲线,我们可以得出,在曲柄转角为5°、55°的位置发生脱离,即发生碰撞和冲击。
2)根据计算和对比分析可知,间隙的存在是减速机产生碰撞和冲击的一大不可忽略的因素。因此,定量研究间隙对四环板针摆行星减速器冲击、碰撞等动力学性能的影响很重要。
猜你喜欢
河南教育·职成教(2022年5期)2022-05-06
在线学习(2021年12期)2021-01-03
设备管理与维修(2019年22期)2019-12-19
铁道通信信号(2019年10期)2019-11-25
铁道通信信号(2019年1期)2019-03-21
军事文摘(2018年24期)2018-12-26
中南大学学报(自然科学版)(2016年2期)2017-01-19
铁道通信信号(2016年10期)2016-06-01
现代商贸工业(2016年35期)2016-04-09
证券市场周刊(2016年11期)2016-03-28