基于双磁致伸缩材料棒的电动静液执行机构技术研究
2021-06-18 06:17周文君
机械工程师 2021年6期
周文君
(山西天地煤机装备有限公司 内蒙古分公司,内蒙古鄂尔多斯017209)
0 引言
电动飞机被认为是未来飞机发展的一种选择,并且已经应用于少数飞机[1]。静液压致动器(EHA)是电动飞机的主要部分,主要用于控制飞机的飞行控制面,其性能决定了整个系统的可靠性[2]。因此,高性能EHA的开发意义重大。智能材料是一种新型的功能材料,是重要的能量转换设备。考虑到它们具有高频响应和高功率密度的特性,一些研究检查了由智能材料组成的EHA[3]。
通常,由智能材料驱动的EHA由智能材料泵、整流阀、液压缸和流路组成[4],其中整流阀分为主动阀和被动阀。由于被动阀的响应速度在高频率下还不够高,因此在本研究中使用主动阀作为整流阀进行了仿真研究。
鉴于单个智能材料单元产生的位移很小,最近使用多种智能材料作为驱动器来放大输出位移或实现不同的运动的情况已引起了人们广泛的研究兴趣。例如,相关研究人员于2010年提出了一种由压电堆驱动的旋转电动机的机构和设计方法[5]。在这项研究中,将相同的电压信号同时施加到2个压电堆上,并且中心转子因摩擦而旋转。该旋转电动机可实现正向和负向旋转,最大负载分别为74 N和78 N。本文提出了一种由两种巨大的磁致伸缩材料组成的复合驱动器的机电转换器(GMM)棒。两个GMM杆通过Z型套筒组合在一起,以实现GMM执行器的高位移输出。
本文研究的目的是设计1个基于双磁致伸缩棒的静液压执行机构(DMEHA),描述其工作原理,并将输出流量与基于单个磁致伸缩棒的静液压执行机构(SMEHA)进行比较。为了比较它们的性能,2个致动器中的磁致伸缩材料棒(MMR)的总长度和线圈匝数相等。为了实现气缸的双向输出位移,采用了两个输入电流信号的初始相位角。此外,由于使用了主动旋转阀,DMEHA可以实现更高的峰值流量。这与由于使用传统的被动簧片阀而呈现出较小峰值流量的其他EHA相反。
1 结构与工作原理

图1 DMEHA三维模型图
DMEHA的三维模型如图1所示,它由2个基于磁致伸缩材料的泵(MMP)、主动旋转阀、液压缸和歧管组成。2个MMP的安装位置相互成90°。
主动旋转阀将2个MMP的出口连接到歧管的不同油路,以使一个泵吸入的油在工作过程中不会干扰另一泵排出的油。DMEHA的工作过程:当泵1处于排油阶段时,则泵2处于吸油阶段。经过主动旋转阀的校正后,泵1排放的机油流向端口1,而端口2的机油流向泵2。另外,当泵1处于吸油阶段时,泵2处于排油阶段。经过主动旋转阀的校正后,端口2的油流向泵1,而泵2排出的油流向端口1。端口1始终用作排油端口,端口2始终用作吸油端口。因此,如果2个MMP的驱动频率与主动旋转阀的频率相匹配,则液压缸将实现连续排量。
2 数学模型
基于DMEHA的结构,本文重点进行了磁性材料泵(MMP)模型研究。
图2所示为磁性材料泵的示意图。信号发生器产生的电压信号通过功率放大器转换为线圈的输入电流。当向线圈施加交流电时,会在磁性材料泵的轴向方向上产生交变磁场,并使磁性材料泵显示相应的输出位移,从而使柱塞运动。贝尔维尔弹簧用于线性化磁性材料泵的输出。基于上述工作原理,磁性材料泵运动过程的数学模型分为3个部分:电压-电流转换模型,磁性材料泵的位移-力模型和机械动力学模型。
电压-电流转换模型:功率放大器通过电阻电容(RC)网络控制负载电流的大小。因此,功率放大器的数学模型被描述为二阶系统,功率放大器二阶系统函数的数学表达式为

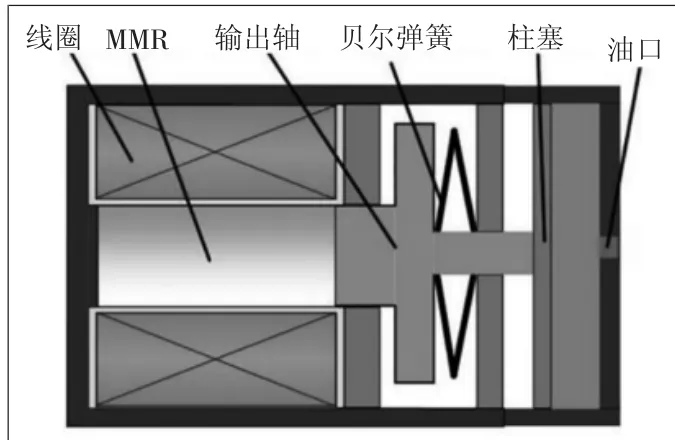
图2 磁性材料泵模型示意图
式中:G(s)为功率放大器二阶系统函数;kU为功率放大器的放大系数;T为RC网络的时间常数;s为负载电流;ωU、ξU分别表示二阶系统的固有频率和阻尼比。
鉴于功率放大器的内部电路很复杂,将阶跃信号和一些不同频率的正弦信号提供给功率放大器,以识别式(1)中的4个主要参数及4个主要参数不等式。
MMR的位移力模型:使用压电系数并通过线性化表示MMR的位移力模型。当线圈以电流I通电时,MMR中的磁通量Φ满足以下表达式:

式中:N为线圈匝数;Rg为磁阻;x为MMR的输出位移;d33为线圈通径。
磁致伸缩力F的表达式为

式中:k表示涡流常数;Φ表示涡流深度;d33为线圈通径。
3 仿真模型与分析
基于上述数学模型,本文建立了MATLAB/Simulink模型,分析了仿真模型的一些主要参数设置。为了分析主动旋转阀的流量,将两个振幅为6 A、直流偏置为3 A、频率为50 Hz的正弦电流信号施加到泵1和泵2。泵1和泵2的电流信号和流量如图3所示,其中Q1in和Q2in分别表示从旋转阀吸入到泵1和泵2的油的流量,而Q1out和Q2out分别表示从泵1和泵2排放到旋转阀的油的流量。
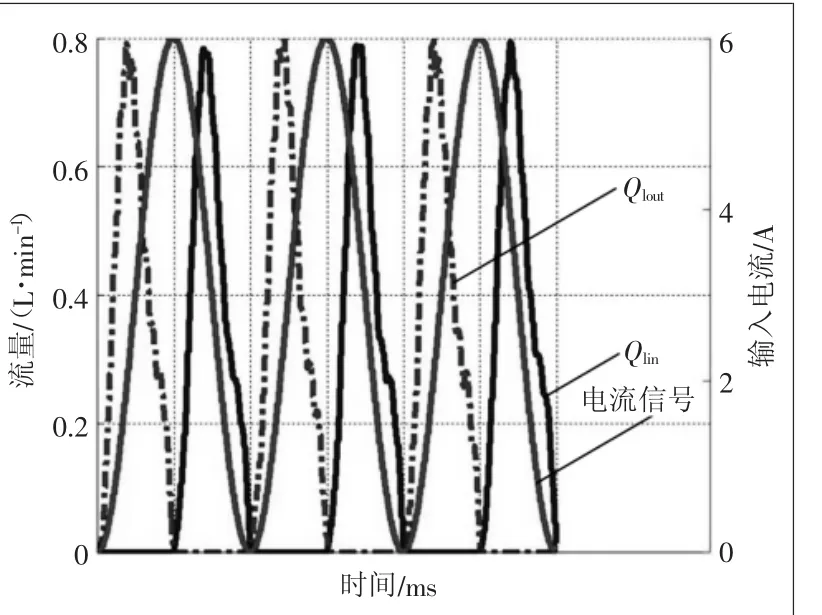
图3 仿真模型分析结果
如图3 仿真模型分析结果所示,在仿真过程中,x轴表示时间(以ms 为单位),由于2 个信号之间的相位差,泵1的输入电流信号在0~10 ms内逐渐增加,而泵2的输入电流信号在同一时间段内减小。因此,泵1连续排出油,而泵2连续吸入油。此外,泵最初先升高然后降低。同时,泵压力也先升高然后降低。在10~20 ms内,泵1的输入电流信号逐渐减小,而泵2的输入电流信号逐渐增大,因此,泵1持续吸油,而泵2持续排放油。在整个过程中,均通过旋转阀进行流量整流,旋转阀将来自排放泵的流量引导至出口端。整流作用导致油流不断,而油流又产生了气缸活塞的连续运动。
4 结论
本文设计了双磁致伸缩棒的静液压执行机构的新结构,并提出了其工作原理:1)一个简单而紧凑的主动旋转阀用于执行油流整流,以实现执行器的连续位移。根据执行机构各部分的工作原理,建立了仿真模型,其结果与实验结果吻合良好。2)将新双磁致伸缩棒的静液压执行机构的性能与基于单个磁致伸缩棒的静液压执行机构的性能进行了比较。结果表明,双磁致伸缩棒的静液压执行机构的最大输出流量在150 Hz的驱动频率下为2.61 L/min,而基于单个磁致伸缩棒的静液压执行机构的最大输出流量在110 Hz的驱动频率下为1.2 L/min。
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
科学家(2021年24期)2021-04-25
中国材料进展(2019年10期)2019-12-07
汽车电器(2019年9期)2019-10-31
网络安全和信息化(2017年6期)2017-11-23
科学中国人(2015年25期)2015-02-28
电子设计工程(2015年12期)2015-02-27
导航定位与授时(2014年2期)2014-04-27
航天器工程(2014年5期)2014-03-11