
采用模糊控制提高某四轮驱动车辆稳定性的研究
2021-06-22 08:28张艳武何晓晖邵发明
机电产品开发与创新 2021年3期
张艳武, 王 强, 何晓晖, 邵发明, 胡 聪
(陆军工程大学 野战工程学院, 江苏 南京 210007)
0 引言
随着轮毂电机设计和控制方面的不断技术进步和发展,控制策略与技术的不断创新,四轮独立驱动的车辆已成为研究的热点,近年来受到学术界和工业界的关注。
金辉等[1]基于极限车速对车辆稳定性进行控制研究,提出了基于补偿横摆力矩的前后轮制动力矩比例分配控制策略。 陈松等[2]为实现对车辆的侧倾控制,自主设计了主动横向稳定杆, 并运用集成控制能有效控制车辆的侧翻与失稳,有效提高了车辆的横摆与侧倾稳定性。王晓玉等[3]对四轮汽车转向工况下力矩的最优分配进行了研究,通过力矩优化分配来控制轮胎纵向力, 保证车辆能够安全稳定的行驶。 张细致等[4]基于车轮转矩优化分配的层次化车辆稳定性控制方法, 用于提高分布式驱动电动汽车的操纵稳定性控制。 Zhenpo Wang 等[5]通过分层控制提高四轮独立驱动电动车辆的稳定性, 通过设计上层和下层组成的分层结构控制器, 分别控制不同的车辆参数来提高车辆的稳定性。 文献[6-7]中也研究了分层控制来提高车辆稳定性的方法。 Zheming Chen 等[8]基于参数估计对四轮独立驱动电动汽车扭矩分配方法进行了开发与评估,将参数估计与车辆稳定性控制相结合, 并基于非线性对扭矩分配方法进行了测试, 证明了观测器的准确性与稳定性控制的有效性。 Fei-Xiang Xu 等[9]研究了根据在偏航率跟踪策略上,基于H2 /H∞鲁棒控制对四轮转向车操纵稳定性能进行了改进,提高了车辆转向的操纵稳定性。
本文基于四轮驱动车辆, 利用模糊控制算法建立分层控制策略,结合车辆的状态参数进行综合控制,提高车辆的操纵稳定性,降低车轮的滑移率,在Carsim-simulink联合仿真模型中进行了仿真验证。
1 车辆数学模型建立
通过建立二自由度车辆模型, 对车辆的整体状态做出估计,将其作为对比分析,实验与分析都证明了二自由度模型的准确性,2DOF 车辆模型被广泛用作汽车控制器设计的参考模型[10-13]。
由图1 分析可知, 二自由度车辆受到的外力沿y 轴方向的合力和绕质心处的力矩为:

车辆沿x 轴和y 轴的加速度ax、ay分别为:

又因为:

图1 二自由度车辆模型
根据坐标规定,前后轮的侧偏角α1、α2为:

式中,Fy1、Fy2—地面对前、 后轮的侧向反作用力, 即侧偏力;δ—前轮转角;a、b—质心距前、 后轮中心的距离;u、v—车辆质心沿x、y 轴方向的速度;k1、k2—前、 后轮的侧偏刚度;wr—横摆角速度;Iz—车辆绕z 轴的转动惯量。
得到稳态的横摆角速度为:

式中,wr1—车辆的稳态横摆角速度;L—车辆前后轮距。
2 分层控制策略
为实现车辆的附加横摆力矩的控制, 设计了分层控制策略, 上层控制器负责车辆的相关参数收集与整车状态的计算,下层控制器负责各车轮的转矩的分配与控制。
2.1 上层控制策略
上层控制器通过采集驾驶员的输入信号, 并结合参考模型, 得到理想的输出结果。 根据车辆的参数采用Carsim 仿真软件建立车辆模型, 并将车辆模型输出到MATLAB/Simulink 中进行联合仿真。
在上层控制器中得到理想横摆角速度wrl:

式中:ΔTj—计算整车需要的调整横摆力矩。
为减少控制系统的复杂性,增强车辆稳定性,在上层控制中结合车辆的横摆角速度偏差与车辆的滑移率,设计模糊控制算法, 通过模糊控制减少车辆处于稳定与相对稳定状态时的控制, 更加精准的控制不稳定性时的车辆。 得到车辆的控制规则见表1。

表1 模糊规则控制表
通过模糊控制算法, 结合车辆横摆角速度与滑移率的稳定性状态参数,得到加权系数Z,与车辆的稳定性调节参数相结合,得到实际的车辆力矩调整ΔT 为:

由图3 可以看出,随着车辆的状态逐渐稳定,加权系数是逐渐变小,最终为0,说明模糊控制算法收敛,可以提高车辆的稳定性。
2.2 下层控制策略
根据地面对车轮的反作用力差异, 为充分利用地面附着力, 通过分配算法对每个车轮施加附加横摆力矩来提高车辆的稳定性,计算公式如下:

式中:ξi—车轮的附加力矩施加系数;Ti—车轮的计算施加转矩;TΔi—车轮的附加力矩;Tbmax—车轮制动时的最大力矩;Tdmax 为车轮驱动时的最大力矩。
2.3 仿真模型
车辆模型所用部分参数见表2。
车辆的控制观测参数包括车辆的位移路径、 横摆角速度、质心侧偏角、滑移率、侧倾角、速度和俯仰角等, 控制参数包括车辆的速度、方向盘输入、 驱动/制动强度, 各轮转矩控制等数据, 这些参数可以通过各种传感器精确测量,以实现对车辆的参数观测稳定性的控制。
结合稳定性控制算法与车辆模型, 通过Carsim 与MATLAB/Simulink 联合仿真得到的仿真模型见图2。
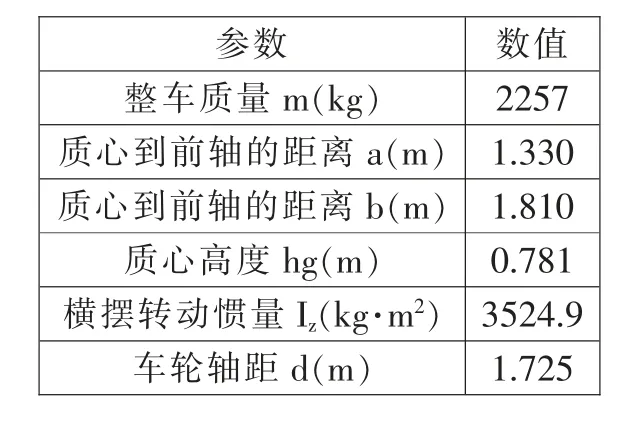
表2 车辆模型参数表
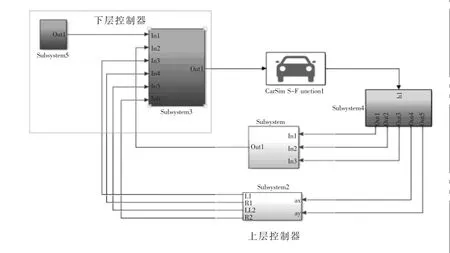
图2 车辆Carsim 与MATLAB/Simulink 联合仿真模型
3 仿真实验与结果分析
为验证所提出的附加横摆力矩控制对车辆稳定性的影响,基于Carsim 与MATLAB/Simulink 搭建的联合仿真模型进行不同附着系数下的双移线路面实验和蛇形工况实验。
3.1 双移线高附着路面实验
设置实验车速为120km/h, 路面摩擦系数为0.85,双移线路径按照ISO 3888-1-1999 标准建立模型, 得到双移线路径设置如图3 所示, 通过实验得到稳定性模糊控制和原车的比例控制下的各参数变化如图4~图6 所示。

图3 双移线实验路径

图4 双移线高附着路面车辆纵向位移变化曲线

图5 双移线高附着路面横摆角速度变化曲线
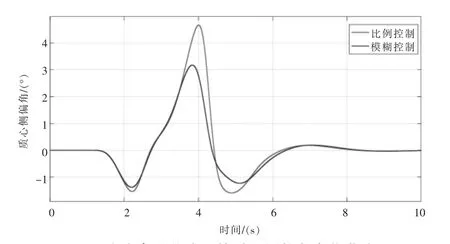
图6 双移线高附着路面的质心侧偏角变化曲线
由图4 的车辆纵向位移变化可以看出,在5~6s 时模糊控制的车辆的纵向偏移量明显较小, 由此可以看出模糊控制可以使车辆的轨迹更趋向于目标路径; 由图5 的车辆横摆角速度变化可以看出,在3.5~7s 时间段内,模糊控制可以有效降低车辆在高附着双移线路面时的横摆角速度变化的峰值; 由图6 的质心侧偏角变化曲线可以看出, 车辆在稳定性模糊控制下的质心侧偏角的三个峰值均小于比例控制下的车辆质心侧偏角。 综合车辆在同控制下各参数的对比, 可以得出本文设计的车辆稳定性控制策略的有效性。
3.2 蛇形工况仿真实验
蛇形工况试验是一种检验车辆操纵稳定性的典型方法,其适用于M 类、N 类、G 类车辆,本文中的四轮驱动车辆属于M2 类车辆。蛇形工况的标桩布置按照GB/T6323-2014 布置,位置布置见图7。
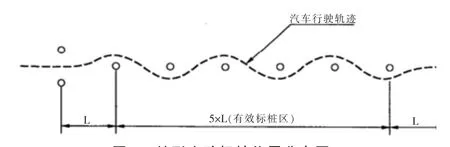
图7 蛇形实验标桩位置分布图
在Carsim 中针对车辆的蛇形工况搭建了驾驶员模型与道路模型,并与MATLAB/Simulink 建立联合仿真,得到车辆在有无稳定性控制策略下的车辆的各参数对比图像。
设置仿真实验的车速为80km/h, 路面为附着系数为0.85 的高附着路面,驾驶员的预瞄时间为0.5s,最高的方向盘转角为720°,得到仿真结果如图8~图10 所示。

图8 蛇形工况下的纵向位移变化曲线

图9 蛇形工况下横摆角速度变化曲线

图10 蛇形工况下的质心侧偏角变化曲线
由图8 可以看出,在稳定性模糊策略控制的情况下,车辆的运动轨迹明显比比例控制的情况下更趋近目标轨迹,有利于车辆的稳定性控制。
由图9 可以看出, 在车辆稳定性控制策略下的横摆角速度变化具有一定的规律性,且变化过程较平缓,对比比例控制下的曲线, 比例控制下的车辆横摆角速度在蛇形穿越的过程中峰值越来越大,且变化相对波动较大,由对比可知,车辆的稳定性控制策略是有效的。
由图10 可知,在车辆稳定性控制中,车辆的质心侧偏角处于正常范围中且维持于较平均变化的趋势, 从在比例稳定性控制的实验曲线变化中可以看出其质心侧偏角的峰值比有控制情况下更大, 且随着车辆沿蛇形工况的路径不断运动中, 车辆的质心侧偏角的峰值呈现不断增加的趋势,说明车辆逐渐失去稳定性控制。
综合蛇形工况下的车辆参数变化对比,可以得出,本文设计的模糊控制能够有效提高车辆蛇形工况下的稳定性。
4 结论
通过建立某四轮驱动车辆的数学模型并进行理论分析,以提高车辆的稳定性为目标,结合模糊控制算法设计了四轮驱动车辆稳定性控制的分层控制策略,通过Carsim与MATLAB/Simulink 建立联合仿真模型, 基于控制策略进行了不同附着系数下的双移线路面的仿真实验和蛇形工况仿真实验,实验表明:在双移线工况下,模糊控制策略可以有效降低车辆沿目标路径运动的偏离量, 降低车辆的横摆角速度、侧倾角速度、俯仰角速度和质心侧偏角的峰值,能够提高车辆的整体的稳定性;在蛇形工况的仿真实验中, 采用模糊控制算法的稳定性控制策略可以提高车辆沿目标路径运动的准确性,有效降低运动时的横摆角速度、 质心侧偏角和车身侧倾角, 提高车辆的稳定性。综上,通过模糊控制算法的分层控制可以有效提高车辆的整体稳定性。
猜你喜欢
军事文摘(2021年18期)2021-12-02
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
中国特种设备安全(2018年10期)2018-12-18
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
金色年华(2017年13期)2017-04-04
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
科学启蒙(2011年9期)2011-09-22
