
水下机器人静水压力试验研究
2021-06-24 08:19吴福森
机电工程技术 2021年5期
吴福森
(国家特种机器人产品质量监督检验中心,福建泉州 362021)
0 引言
随着人们对海洋领域的日益关注以及海洋技术的发展,水下机器人将在海洋水下探测、作业、援救中发挥越来越大的作用。而水下机器人测试技术作为水下机器人性能的保障,也必然成为水下机器人设计、试验、改造中至关重要的一个环节[1]。完善的测试体系、科学的测试方法、良好的测试条件是保证水下机器人出厂、正常进行水下工作的前提[2]。
轻型有缆水下机器人是带有线缆的用于海洋水下环境观察与作业,水下部分起吊(空气)质量不大于1 t的水下机器人;或用于江河湖泊的,额定工作水深不小于100 m的观测型水下机器人;或用于江湖湖泊的,额定工作水深不小于300 m的作业型水下机器人[3]。
静水压力是指水下机器人的空舱、浮力材料,应能载标称的压力条件下不产生残余变形,试验结束后应能正常工作[4]。静水压力试验是指将水下机器人的空舱、浮力材料静水压力,按照GB/T 32065.15规定的方法进行试验;充油电路按照GB/T32065.15进行带电试验,电路工作应正常[5]。
目前在对于轻型有缆水下机器人的静水压力试验还没有成熟的设备,直接在江河湖海里试验,对被测机器人和试验人员都有很大的危险性[6]。国内外有研究机构采用压力实验舱进行测试,但由于升降压控制系统不够灵敏,导致试验准确度不能满足要求[7]。由于实验舱体的密封性要求很高,带缆的机器人不能实现线缆的穿舱试验,不能满足标准要求的机器人带电试验[8]。
本文研究水下机器人的静水压力试验方法和测试标准,设计一套应用于水下机器人静水压力测试试验平台,能够满足静水压力的测试要求;同时对水下机器人的放置结构进行改进,方便机器人的投入和取出。
1 硬件系统设计
本文的试验设备采用的是一种用于轻型有缆水下机器人静水压力试验的装置,该装置由水下机器人深水模拟实验舱、舱内照明和摄像采集系统、自动加卸压系统、机器人装卸装置四大部分组成。
1.1 水下机器人深水模拟实验舱
如图1所示,水下机器人深水模拟实验舱采用Q345材料制作,舱内壁涂镀层为高密度抗腐蚀漆,最高模拟水压可以达到6.5 MPa,相当于水深650 m,实验舱内部深度4 m,直径1.5 m,最大可以容纳3.5 m×1.2 m×1.2 m(长×宽×高)的测试样品,采用液压传动开关舱盖,并加装一圈密封紧固圈,在实验过程中保证舱内压力稳定,保障加减压过程安全。
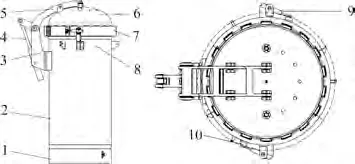
图1 水下机器人深水模拟试验舱
如图2所示,实验设备采用水密电缆双母头穿舱连接技术,实现轻型有缆水下机器人带电实验,相比其他实验的测试方式,可穿舱带电测试,可远侧监测机器人测试情况,升降压控制系统更稳定,实验环境更安全。

图2 水密线穿舱
1.2 舱内照明和摄像采集系统
水下摄像和照明系统是集成了水下摄像机、水下照明灯、分线盒、显示器、硬盘录像机、LED恒流源、开关电源、触控鼠标以及其他附件的一体化监控系统,控制系统包含视频采集显示和水下照明控制两部分,主要任务通过远程调光,提高水下摄像机的成像质量,完成水下摄像机视频采集显示。舱内照明和摄像系统如图3所示。

图3 舱内照明和摄像系统
水下摄像机通过视频线(4路网线、4路同轴)连接至视频输入接口,将视频信号接入系统。最多可同时从4个方向观察试验样本,能够全方位实时监控实验样本的状态变化。
1.3 自动加卸压系统
试验舱加卸压控制系统的组成如图4所示,包括1部高压泵、试验舱、2部电动截止阀,并且实时显示其运行状态。设备主要参数如表1所示。

图4 自动加卸压系统
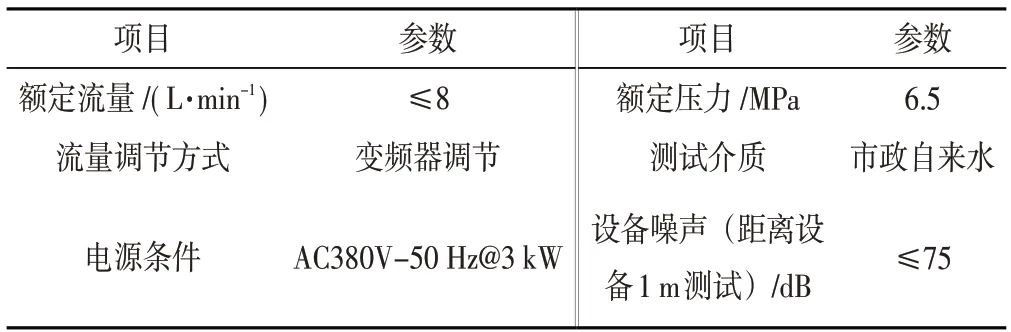
表1 设备主要参数
如图5所示,试验参数设置界面的静压试验参数为一组压力台阶,每个台阶包括压力、升降压速度、终压保持时间3个参数,根据试验需要可设置循环次数,也可以选中配置文件列表中的任意文件,通过配置文件载入方式进行快速配置试验参数
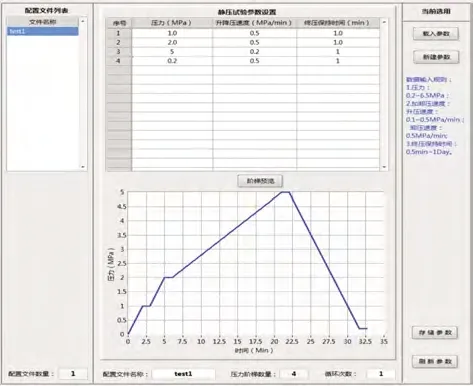
图5 试验参数设置界面
1.4 机器人装卸装置
机器人装卸装置由悬臂起重机和吊具组成,如图6所示,悬臂起重机载重最大值为3 t,旋转范围180°,悬臂起重机由立柱、回转臂回转驱动装置以及电动葫芦组成,安装在支撑性混凝土立柱上,电动葫芦在悬臂工字钢上做左右直线运行,起吊内筒。将内筒吊到地上,然后装上机器人,再起吊放入试验舱内。内筒结构为上下2片直径为1.5 m的圆形钢板,中间由3条工字钢连接,底部钢板上开有数个圆孔,在内筒下试验舱时可以有效提高内筒下降稳定性,平衡浮力不均匀带来的内筒下降角度倾斜问题,避免下降过程中内筒倾斜导致机器人偏移出监控范围。

图6 机器人装卸装置
2 样品检测实验
2.1 实验样品
样品概况如表2所示。

表2 样品概况
2.2 实验条件
标准按照GB/T 36896.1-2018轻型有缆遥控水下机器人第1部分:总则。实施。现场检测条件如表3所示。
2.3 实验过程
将水下机器人安置在机器人装卸装置的内桶中,并检验水下机器人外观,然后利用悬臂吊起重机起吊内桶放入实验舱内,封闭实验舱,加压,保压,卸压,取出水下机器人,观察水下机器人状态。实验各个阶段的如图7~9所示。

表3 实验条件检测

图7 测试前水下机器人外观

图8 测试中水下机器人外观
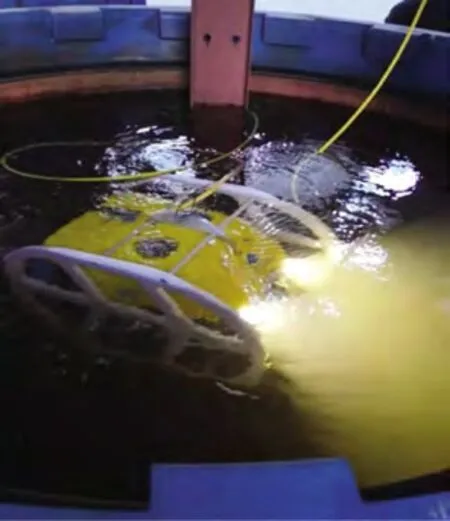
图9 测试后水下机器人外观
2.4 实验参数
实验过程压力值记录值如表4所示。
2.5 实验结论
在实验压力3 MPa下,机器人各项功能正常。水下机器人的空舱,浮力材料,在标称的压力条件下不产生残余形变,试验结束后能正常工作。
本文研究水下机器人的水下性能检测方法和测试标准,设计一套应用于水下机器人静水压力实验平台,并对舱盖穿舱改进和内筒改进。建立可考察特种机器人水下通用性能的水下复杂环境模拟平台,平台可实现水下650 m级深度及真实水温环境模拟,可真实模拟特种机器人水中下潜及上浮速度。平台检测功能包括机器人水下作业性能测试、水下通信可靠性测试、机器人水下密封性能测试等。同时建立特种机器人水下性能检测方法。

表4 压力值记录
3 结束语
物联网和人工智能的快速发展,为水下作业机器人应用带来了巨大的需求和应用,特别是近海海域水资源监测以及江河湖泊深水水资源监测,本文研究水下机器人的静水压力试验方法和测试标准,并设计一套静水压力测试试验平台,平台检测功能包括机器人水下作业性能测试、水下通信可靠性测试、机器人水下密封性能测试等。同时建立特种机器人水下性能检测方法。对机器人水下性能的测试表明该平台能够满足静水压力的测试要求,能够为水下机器人的放置结构的改进提供可靠数据。
猜你喜欢
钻采工艺(2022年4期)2022-10-21
饮食保健(2020年7期)2020-04-30
价值工程(2018年19期)2018-08-29
中国船检(2018年6期)2018-06-22
中国美容医学(2017年7期)2018-02-02
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
家庭科学·新健康(2014年10期)2014-10-24
原子能科学技术(2014年8期)2014-08-08
