
矿用掘进机运行监控系统的应用
2021-06-24 08:19靳华龙
机电工程技术 2021年5期
靳华龙
(西山煤电建筑工程集团有限公司矿建第一分公司,太原 030053)
0 引言
随着井下煤矿开采的现代化发展,国家管理部门越来越强调设备的高速、高效和安全可靠性,掘进机的发展趋向于机械电气一体化[1-4]。相较于国际先进的掘进机控制技术,目前我国掘进机控制技术的发展存在诸多短板[5-6],在元器件的稳定性和可靠性、数据监测实时性和有效性、现场总线布置方式、智能化和人机一体化等方面还有很大的进步空间[7-9],为了提高掘进机控制技术水平,本文研究了一种掘进机可视化运行监控系统,提高了国产掘进机控制系统的智能化和自动化水平。
1 实时监测方案设计
1.1 电机温度监测
对于EBZ160系列鼠笼式电机而言,八成以上的故障是由定子绕组引起的,定子绕组的运行温度高,如遇冷却回路不畅或运行时间长等情况,极易发生绝缘损坏和匝间短路等故障。在截割电机内部装设双金属片式的温度传感器,当定子绕组温升超过80℃时,温度开关立即断开真空接触器,避免电机发生故障。
1.2 电机电流监测
掘进机的电机数量多,主要有截割电机、油泵电机、锚杆电机、装载电机、传送带传送电机等,在供电不稳的情况下,线路的过流保护继电器和熔断器动作,防止电机长时间工作在恶劣环境下。电机电流监测通过电流互感器进行,当监测电流出现过流、断相和过载等异常现象时,控制器通过中间继电器切断电机电源。
1.3 瓦斯监测
瓦斯超标容易引起爆炸,因此瓦斯含量超标后应立即切断电源回路。本质安全型瓦斯传感器采用电桥原理,装设有瓦斯气体敏感元件的桥臂在瓦斯浓度升高后催化燃烧,电桥输出接入AD转换模块,本文设计的瓦斯浓度监测阈值为3%。
1.4 油位油温监测
长期工作的液压系统油位和油温会发生变化,带热敏触点的油位开关和磁铁浮子可以监测油位和液压油温度,无论是油位低于标定值还是温升超过75℃,都会触发保护动作,切断电源回路迫使电机停机。
1.5 压力监测
喷雾系统上装设有本安压力开关,其输出端连接到单片机的数字输入端口。压力低于断开值会在处理器上显示,喷雾压力传感器的原理是压敏电阻组成的电桥,当压力变化时,不同的桥臂变形程度不同,电阻阻值也不同,所以电桥会输出一个变化的电压,经过放大电路后处理成标准电压信号,供单片机模数转换模块接收。
2 硬件电路设计
监控主板的功能是采集和处理掘进机状态和现场生产环境的监控数据,控制掘进机实时运行,是整个设备机电控制监控系统的核心。按照功能不同,主板上的硬件电路可分为EEPROM数据存储模块、模拟量和开关量输入模块、LPC1768主控制器模块、输出电路及其驱动电路模块、数据传输系统CAN总线模块,监控系统主板结构如图1所示。

图1 监控系统主板结构
2.1 电源电路
监控主板上的供电主要指的是各类芯片供电电源3.3 V,外部输入电源为交流127 V,经过专门的矿用隔爆本安UPS变换为直流12 V,最大电流可达1 A。采用正向低压降稳压芯片AMS1117对12 V电源进行变换,可以得到3.3 V电源。AMS1117的稳压管由1个PNP型晶体管和NPN型晶体管组成,具有输出精度高、温度范围宽的特点,其内部还集成了温度保护电路,能够在结温过高时自动切断电路。3.3 V电源电路设计原理如图2所示。
2.2 最小系统
LPC1768的最小系统设计包括时钟电路设计、晶振电路设计、复位电路设计和扩展存储电路设计。LPC1768需要配置3个独立的时钟电路,除了主时钟振荡器,还需要配置RTC时钟振荡器和内部RC时钟振荡器,在系统复位以后,控制器由内部RC振荡器提供时钟,降低了LPC1768对外部时钟的依赖程度。
2.3 CAN总线收发电路
CAN总线收发电路的核心芯片为SN65HVD230,其设计原理如图3所示,图中CANH和CANL之间并联的电阻R7为终端电阻,其阻值根据导线的特性阻抗进行选择,本设计取120Ω。SN65HVD230的8脚Rs为斜率电阻R5输入引脚,目的是使其工作在斜率控制方式。
2.4 开关量输入输出模块
为了对掘进机的发动机进行全面监控,需要获取发动机的开关状态,发动机的开关有空挡开关、空调开关、启动机开关和节气门开关。在进行开关量输入电路设计时重点考虑的环节为电平匹配和电气隔离,本设计中采用光电耦合芯片TLP521进行解决,在传递信号的同时避免了直接的电气联系。
除了接收发动机的开关量,监控系统还应当具有对发动机的控制功能,这就需要设计相应的开关量输出电路,在设计时主要考虑信号的驱动电路,开关量输出电路设计原理如图4所示。将LPC1768的P1口作为数据出口,经过数据锁存器74HC573和驱动芯片74HC244,电平信号转换为具有驱动三极管开通的驱动信号,之后由三极管传输开关量给中间继电器。
2.5 模拟量输入电路

图2 3.3 V电源电路设计原理

图3 CAN总线收发电路设计原理

图4 开关量输出电路设计原理
模拟量输入电路采用运算放大电路进行前后级隔离,采用高输入阻抗低输出阻抗的LM358芯片,能够放大电路的带载能力,LM358设计原理如图5所示。LM358具有两路独立、高增益的运算放大器,可同时对传感器1和传感器2进行电压跟随,其放大倍数约等于1。

图5 LM358设计原理
3 系统软件设计
3.1 主程序
监控软件的功能为CAN总线通信功能、控制输出功能、数据存储功能、数据分析功能及数据采集功能,主程序流程如图6所示。执行主程序时,首先系统初始化,即对内部时钟、模数转换模块、CAN总线模块、看门狗和定时器等的寄存器进行初始化设置。

图6 主程序流程

图7 模数转换程序流程
3.2 数据采集程序
整个控制系统有5路数字量输入通道,在数字量开始转换前,将单片机P0口设置为GPIO输入模式,检测到IO口的电平发生变化后判定数字量。系统中模拟量输入通道为8路,模拟量输入程序开始后,进行模数转换模块的初始化,设置时钟寄存器、AD转换寄存器、采样时间、数据存储格式和数据量,为了滤除外部干扰,本程序采用加权平均方式进行软件滤波,采集到模拟量后存入相应的FLASH,具体的程序流程如图7所示。
3.3 输出控制程序
控制程序包括主截割电机启停、装载液压马达启停、锚杆钻机启停、冷却水控制、报警控制、铲板升降、输送机启停、行走控制和风机控制。掘进机截割前的准备动作流程如图8所示,程序开始后判断掘进机是否平稳,然后控制电磁阀升降动作,按顺序开启刮板输送机电磁阀和装载电磁阀,最后进行状态检测。
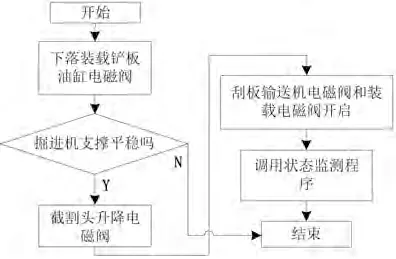
图8 截割前的准备动作流程
3.4 通讯程序
CAN总线通信程序是建立在总线协议之上的,通过对LPC1768 CAN内部寄存器进行配置完成其通信程序设计。初始化CAN控制器时,需要设置总线时钟频率、波特率寄存器和滤波寄存器,初始化完成后设置CAN控制器,设置的顺序:关闭使能,设置中断优先级、电平下降沿和中断引脚,设置定时器,设置数据格式。通信程序CAN协议帧响应流程如图9所示,当所传输帧正确后存入寄存器,帧错误后发送误帧信号后清除内存。

图9 通信程序CAN协议帧响应流程
4 结束语
基于LPC1768的掘进机可视化运行监控系统具有高速、低功耗、低成本等特点,CAN现场总线实现了分散控制,硬件上表现为接线简单可靠,不同的现场设备能够相对独立工作,本文所研发的矿用掘进机运行监控系统具有适应性和可靠性好的特点,有利于实现标准化控制。
猜你喜欢
数学小灵通·3-4年级(2021年9期)2021-10-12
小学生学习指导(低年级)(2020年10期)2020-11-09
电子制作(2019年16期)2019-09-27
电子制作(2019年23期)2019-02-23
测控技术(2018年8期)2018-11-25
数学大王·中高年级(2017年2期)2017-02-08
厦门理工学院学报(2016年1期)2016-12-01
学苑创造·A版(2016年4期)2016-04-16
凿岩机械气动工具(2015年3期)2015-11-11
凿岩机械气动工具(2014年3期)2014-03-01
