基于元胞自动机模型的自动驾驶汽车比例对交通效率影响的研究
2021-06-25 06:44孙雪东于皓同王明亮
科学技术创新 2021年15期
孙雪东 于皓同 王明亮
(沈阳航空航天大学 机电工程学院,辽宁 沈阳110000)
1 概述
在现代化发展的进程中,交通拥堵日益加重。无论是哪种道路,其承载力是有一定限度的。近年来,随着交通流理论的研究与发展,复杂交通行为的描述分析也越来越困难。[1]此外,很多学者提出了各种方法来缓解交通拥堵,如改进车辆的换道规则,建立新的二维交通流CA;[2]增加车流中自动驾驶汽车所占的比例能够显著提高道路的实际通行能力。[3]
文章主要基于元胞自动机模型对自动驾驶汽车比例影响交通效率的问题进行研究,针对此问题,将分为以下两个方面进行研究:(1)建立基于元胞自动机的单车道模型,以“当道路流量为最大流量时”这一特殊情况作为切入点,在将车辆视为质点与考虑车身长度两种不同情况下,交通效率与自动驾驶之间的定性分析。将初始密度的差异作为不同交通任务,分析汽车在有人驾驶与无人驾驶的情况下的最小安全距离以及最大流量从而得出车辆的速度极值,应用元胞自动机模型建立1000 个元胞个数,通过引入当量随机慢化概率来表达不同自动驾驶汽车比例下的交通效率的大小,得出在不同交通任务条件下,车流中自动驾驶车辆的比例对交通效率的影响;(2)引入换道这一道路间的交互行为,构建出同向双车道的交通网络,以单向车道中的模型为基础,同样通过引入当量随机慢化概率,来最终表达交通效率。
2 模型的假设
根据元胞自动机模型的假设依据提出了如下适用于本文的模型假设:[3]
2.1 研究自动驾驶车辆所占比例对交通效率的影响时,假设每个被研究个体间没有差异。即每个司机的心理状态波动、反应所需时间、每辆汽车的启动制动时间等因素均可分别用同一个简单的参数表示。
2.5 假设元胞自动机的状态变量仅能取有限个的离散值。
3 自动驾驶汽车所占比例与当量随机慢化概率的对应关系
随机慢化概率是在驾驶过程中,由于道路状况的变化,司机的过度刹车、心理因素、延迟加速等因素的存在,交通流可能产生随机慢化现象。根据王文[3]的自动驾驶技术对交通运行的影响研究,发现随机慢化概率对车流量的影响较大。因此,只需将车流中自动驾驶车辆的比例转化为随机慢化概率,再由慢化概率的变化求出流量的变化,即可完成已知自动驾驶车辆的比例,求交通效率的过程。除此之外,还应考虑不同的交通任务条件。不同的交通任务条件用道路上车辆的不同初始状态来区分。因此,可设定不同的初始密度(初始时刻,整个车道中单位元胞内某一瞬时存在的车辆数),来代表不同的交通任务条件。
为了将车流中自动驾驶车辆的比例转化为随机慢化概率,建立了如下的模型:

其中,p ——全体车辆的当量随机慢化概率。
a ——车流中自动驾驶车辆所占比例。
pa——车流中全为自动驾驶车辆时的随机慢化概率。
ph——车流中全为人工控制车辆时的随机慢化概率。
根据Zhenke Luo[4]的研究,假设普通车辆的随机慢化概率是ph=0.3。当车流中全部为自动驾驶车辆时,减速行为不再随机,显然有pa=0。通过上述模型,分别计算出自动驾驶汽车不同占比时的当量随机慢化概率p,如表1。
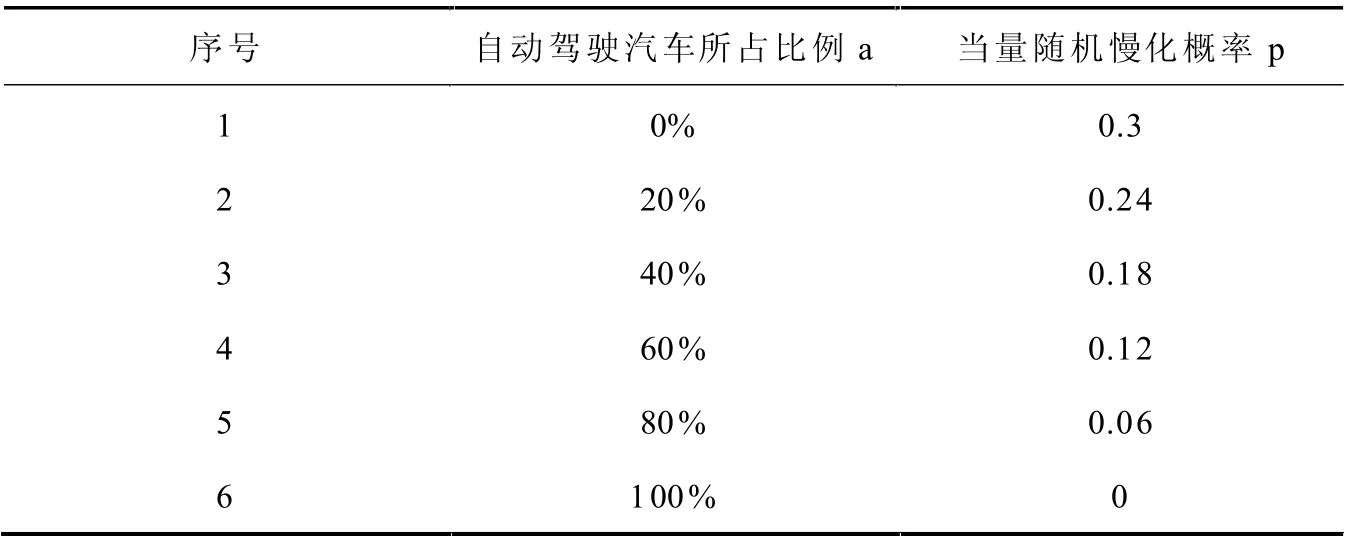
表1 自动驾驶汽车所占比例a 与当量随机慢化p 概率的对应关系
2.2 在交通网络中,只要满足换道条件,司机一定会做出换道的决定。
2.3 假设所有元胞均分布在按一定规则分布的离散元胞空间中。
2.4 假设元胞系统模型中时间演化是等间隔的,且t 时刻的状态只对下一时刻(t+1)产生影响。
4 自动驾驶汽车比例对单车道模型的影响分析
4.1 元胞自动机模型的建立
为了将随机慢化概率转化为流量,应用元胞自动机的方法。元胞自动机模型是一种时空离散的局部动力学模型,它并不是由严格定义的物理方程或者函数确定,而是用一系列模型构造的规则构成。元胞自动机常应用于研究复杂系统的一种典型方法,特别适合应用于解决空间复杂系统的交通流时空动态模拟研究。[5]
规定车辆行驶规则为:黑色元胞表示被一辆车占据,白色表示无车,若前方格子有车,则停止。若前方为空,则前进一格。

图1 车辆行驶规则示意图
NS 模型是一个随机CA 交通流模型,每辆车的状态都有它的速度和位置所表示,其状态按照以下演化规则并行更新:
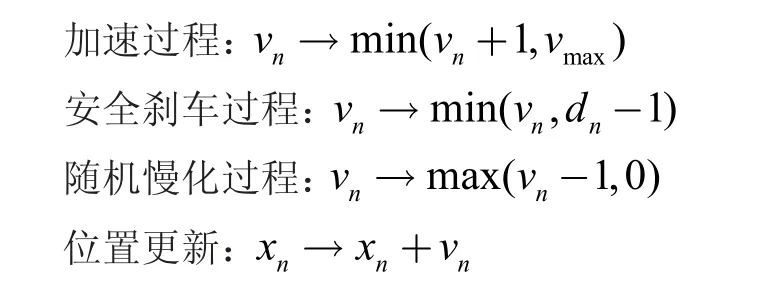
NS 模型的演化规则如下:
(1)加速:司机总是期望以最大的速度行驶;
(2)安全刹车:避免碰撞;
(3)随机慢化概率:综合考虑过度刹车、道路条件变化、心理因素、延迟加速等不确定因素;
(4)位置更新:车辆前进。
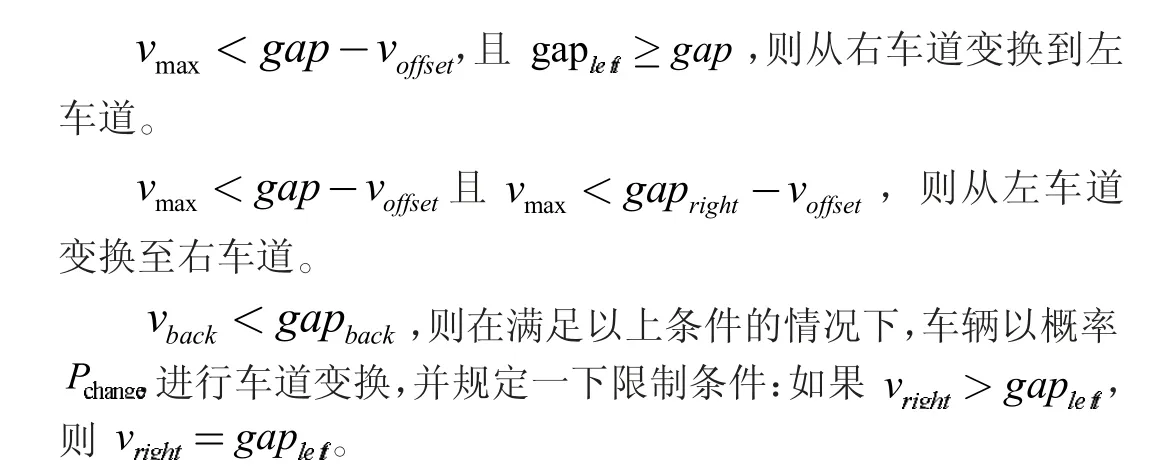
车道变换规则如下:
4.2 不同随机慢化概率的模型结果分析
分析上述所建模型,可以发现:当密度较低时,流量几乎不随当量随机慢化概率的变化而变化;而当密度过高时,所有当量随机慢化概率时的流量都开始大幅下降。这是因为,当车辆密度过小时,所有车辆均正常行驶互不干扰,自动驾驶的优势也无法突出;当车辆密度过大时,车流过于拥堵而几乎无法前进。考虑到道路往往是在车流量适中的前提下使用的,故不考虑密度过大及过小的情况。
抛除密度取值较为极限的情况,仅考虑密度适中的流量变化,可知当量随机慢化概率p 降低,即自动驾驶占比升高时,车流量也逐渐升高,交通效率逐步提升。
4.3 车流密度的模型结果分析
为了更加准确地研究交通效率随自动驾驶比例的变化,可作出车流中自动驾驶汽车的比例-流量变化曲线,图像中的横坐标—密度一项恒为中间值0.15。通过对流量-密度图的拟合,精确求出不同当量随机慢化概率下,密度为0.15 时所对应的流量。然后,做出在密度为0.15 时,流量Q 随车流中自动驾驶汽车比例r 的变化曲线。结果如下所示。
流量Q 的大小能够直接反映出交通效率的高低。流量越大,交通效率越高。因此,从图2 中可以得到:

图2 初始密度0.3 时,车流中自动驾驶汽车的比例- 流量变化曲线
当自动驾驶汽车的比例趋近100%时,交通效率最高。
当自动驾驶汽车的比例在60%左右时,交通效率次高。
然而,该模型只考虑了应用于单条公路时的情况。在无任何其它驾驶行为(如频繁换道、等待红绿灯等)时,所有汽车若均采用自动驾驶,那么自然所有汽车的驾驶行为也将几乎同步。这种理想的高效情况在实际驾驶情况下不具备参考价值,故不予以考虑。
因此,考虑实际情况,当自动驾驶汽车的比例在60%左右时,交通效率最高。

图3 交通效率最高时的时空图
对比三种不同交通任务条件下的结论,可以发现:
当初始密度不大时,为保证交通效率最高,自动驾驶汽车的比例应保持在60%左右。
当初始密度较大时,为保证交通效率最高,自动驾驶汽车的比例应保持在90%左右。
这是因为,当初始密度不大时,车辆分布较为松散,人类的反应速度、心理因素等对于交通效率的减弱作用不强。而当初始密度较大时,车辆分布密集。此时,自动驾驶的优势能够更好地被体现出来。

图4 车流中自动驾驶汽车的比例- 流量变化曲线
5 单向双车道模型的建立与求解
5.1 元胞自动机模型的建立
在实际生活中交通网络不只有单向单车道,而是由各种运输网、邮电网构成的整体交通网,其中的各个部分互相交织,互有联系。因此,在考虑问题时,需要考虑不同车道间的相互作用关系。以同向两车道交通网络为研究对象,可沿用上述模型的分析方法。在同向两车道交通网络中,两条车道的相互作用主要表现为车辆改变车道时,会对对方车道上车辆的影响。换道行为的发生主要由换道条件和换到欲望两个方面决定。但根据调查得知,近年来司机的换道频率愈发频繁,换道欲望也逐渐升高。因此,提出了假设,认为在满足换道条件的情况下,司机一定会做出换道的决定,并使用换道条件这个参数来量化换道对于交通网络的影响。
模型的其余部分与单向单车道中的模型类似,即车流中自动驾驶汽车的比例影响当量随机慢化概率,由当量随机慢化概率求解流量,流量来代表交通效率。当量随机慢化概率的计算公式与参数设定也同样沿用自单向单车道中的模型。自动驾驶汽车比例与当量随机慢化概率的对应关系见表2。

表2 车辆行驶规则
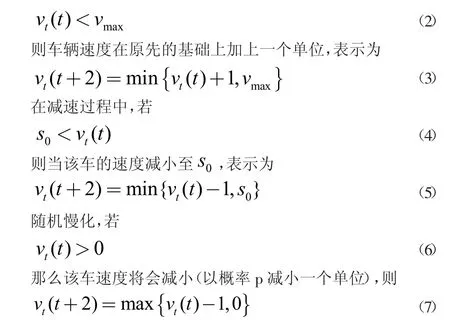
现对本模型做出如下规定:
换车加速过程中,若
5.2 车流密度的模型结果分析
为了保证拟合曲线更具代表性,分别取不同当量随机慢化概率下的流量的平均值来代表拟合曲线各点纵坐标Q。绘制出此时流量Q 随车流中自动驾驶汽车比例r 变化曲线。
可知交通效率随着车流中自动驾驶汽车比例的升高而提升。
6 结论
通过元胞自动机模型与曲线拟合模型的方法分别对单车道与双车道中不同比例的自动驾驶汽车进行交通效率分析。单车道在自动驾驶汽车占比60%的情况下交通效率最好;双车道在自动驾驶汽车占比越多的情况下,交通效率越好。单车道与双车道的模型所得出的结论有所不同,是因为当较为复杂的换道行为被引入时,车辆需要进行更多次、规则更为复杂的变速运动。这些变速运动使得人类驾驶需要反应时间这一劣势被进一步放大。当人工驾驶时,前车减速,紧随的后车也会有延时地跟着进行反应,这些减速运动会像浪潮一样向后传递,造成“幽灵拥堵”的现象。而当自动驾驶汽车比例提高后,加、减速动作的传递将几乎没有延时。这可以有效避免类似“幽灵拥堵”现象的产生,提升交通效率。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
小学生学习指导(高年级)(2021年3期)2021-04-06
扬子江(2019年3期)2019-05-24
辽河(2019年2期)2019-03-22
小学生学习指导(高年级)(2018年3期)2018-11-29
智能计算机与应用(2018年5期)2018-10-20
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
读写算·高年级(2017年4期)2017-04-15
北京测绘(2016年2期)2016-01-24