WAM机器人辅助上肢康复训练技术应用研究
2021-06-28 09:21白敬张进敏孙慧玉王保升
南京信息工程大学学报 2021年3期
白敬 张进敏 孙慧玉 王保升
1 南京工程学院 智能装备产业技术研究院,南京,211167 2 南京工程学院 江苏省智能制造装备工程实验室,南京,211167 3 南京中电熊猫平板显示科技有限公司,南京,210033 4 南京工程学院 汽车与轨道交通学院,南京,211167
0 引言
由脑卒中、脑外伤、脊髓损伤等疾病引起的上肢偏瘫患者日益增多[1],他们亟待进行康复治疗.传统的上肢康复训练方式主要通过康复医师帮助或者由简单的器械牵引患肢辅助康复训练,但很难确保康复运动训练的时间长度、训练强度和规范性,不易达到满意的治疗效果[2].由于康复科室少和康复装备供应不足,大部分患者不能及时、正确地进行康复训练,使得不少上肢偏瘫患者难以康复.随着人们健康意识的不断增强,康复医疗需求不断增加.机器人辅助康复治疗的持续性和重复性好,可提供科学有效的康复训练方法,改善康复训练效果[3].
国内外学者对康复机器人进行了大量研究,如美国麻省理工学院研制的模块化康复训练机器人MIT-MANUS[4]、美国Motorika公司(http:∥motorika.com/reogo/)研制的多种训练模式上肢康复机器人Reo Go、Washabaugh EP等研制的便携式平面康复机器人PaRRo[5]、Atashzar等[6]研究的基于虚拟环境的触觉康复机器人HRR、2005年瑞士苏黎世大学研制的一款典型上肢外骨骼康复机器人ARMin[7]、华盛顿大学研制的线驱动七自由度外骨骼式机器人CADEN-7[8]等.近年来外骨骼康复机器人的发展较快,国内外学者研究较多,如基于气动肌肉驱动的五自由度可穿戴式上肢外骨骼RUPERT[9]、基于转矩可控的串联弹性驱动器外骨骼机械臂ANYexo[10]、七自由度电缆驱动外骨骼机械臂CAREX-7[11]、基于弹性驱动器的四自由度肩肘关节外骨骼NESM[12]等.但对机器人康复训练效果的研究相对较少.康复效果是验证康复训练方法可行性的重要一环,因此对康复训练效果的研究必不可少.
康复评估是制定康复治疗方案的基础,也是观察其治疗效果的客观标准,对康复治疗、评估治疗疗效、预测功能恢复均有重要的作用[13].目前,脑卒中幸存者的运动功能和治疗干预的效果通常由治疗师使用临床评估量表来评估.机器人衍生的测量技术,可以为患者行为提供客观精确的测量[14].
本研究运用WAM机器人对上肢偏瘫病人进行康复训练,对其康复过程进行跟踪,分析运动参数,评价康复效果,同时运用医学评估Brunnstrom等级分期法进行康复评估,分别从机器人运动参数和传统医学评估方法两方面分析,验证WAM机器人进行上肢康复训练的有效性.
1 方法
1.1 康复训练方式
在中风患者康复的过程中,康复训练的方法尤为重要,设计合理的康复训练方式,有助于中风患者的早日康复.根据上肢日常活动范围,考虑患者中风后肢体的运动范围及病人的承受能力,针对有一定活动能力的患者,在保证安全的前提下,设计上肢末端的“十”字与“米”字运动,即患者手部抓握机械臂末端手柄,机械臂牵引上肢在空间范围内写“十”字与“米”字,以达到训练上肢的目的.
为使康复训练变得生动有趣,设计相关虚拟场景以提高患者参与康复训练的积极性.采用Kinect采集手部位置信息,控制虚拟篮子接物体,设计各种形状的物体,包括三角形、四边形、五边形、六边形、五角星等,从屏幕上方随机掉落,篮子接到物体得分.受试者在进行医院常规训练的同时,进行为期1个月的机器人康复训练,每周5次,每次30 min,每周记录1次康复训练结果,以验证康复训练的有效性.康复训练前后,康复评估师分别对每个受试者进行康复评估,比较机器人康复训练和传统康复训练的效果.
1.2 机器人控制方法
在康复训练过程中,上肢康复机器人与患肢直接接触进行交互,患者的安全非常重要,这就需要实时监测机器人末端与患肢之间的相互作用力,并保持系统的稳定性.在控制方法中,阻抗控制具有一定的优势,能较好地通过调节机器人的位置偏差与末端力的动态关系来控制机器人的位置和力.本文所采用的WAM康复机器人系统的目标阻抗控制模型如下:
Kd(q(t)-q(t))=Fd(t)-Fe(t),
(1)

在实际的康复训练中,为机器人阻抗控制模型选择合适的参数是非常重要的.通常情况下参数可以通过自适应方法、神经网络学习方法或从示教数据中获得.本文采用自适应模糊反演的方法对阻抗控制模型的参数进行优化.图1为基于自适应模糊反演的阻抗控制系统框图,具体控制方法的设计见参考文献[15].

图1 基于自适应模糊反演的阻抗控制系统框图Fig.1 Backstepping adaptive fuzzy based impedance control system
1.3 数据采集与处理
WAM机器人牵引上肢偏瘫病人患肢进行“十”字和“米”字运动,机器人各关节安装位置传感器和转矩传感器,记录每位受试者康复训练时机器人的位置和转矩信息并分析,以反映受试者康复训练情况.分析康复训练前后的轨迹跟踪误差的绝对值及其最大值和最大绝对转矩及其变化率,来评价患肢的运动功能.在康复训练1个月后,康复评估医师运用Brunnstrom等级分期法分别对受试者的患肢运动功能进行评估,记录患肢运动功能等级,对比康复训练前后受试者的康复情况.
2 实验
2.1 实验装置
本实验上肢康复机器人系统由四自由度WAM机械臂、三维力传感器、手柄、主机构建而成.机械臂是由美国barrett公司生产的标准4-DOF WAM机械臂,可反向驱动,采用钢丝绳直接驱动各个关节,机械臂通过CAN总线与外部PC进行数据传输.三维力传感器采用整体轮辐式十字梁结构,底端底盖通过法兰盘与机械臂相配合连接.手柄通过3D打印的方式获取实物,安装在柄托上,通过法兰盘与传感器顶柱的销孔相连接,固定于WAM机械臂的末端,以方便受试者抓握.运用Kinect相机采集受试者上肢位置信息,搭建虚拟环境,提高康复训练的趣味性,增加受试者康复训练的积极性.
2.2 受试者
临床康复训练试验在南京同仁医院康复医学科进行,选取住院治疗的偏瘫患者为受试者,进行1个月的跟踪训练与评估.病例筛选标准如下:
1)纳入标准:符合1995年全国第4届脑血管病学术会议通过的《各类脑血管病诊断要点及脑卒中患者临床神经功能缺损程度评分标准》,并经临床确诊的初发脑卒中患者,均存在肢体运动功能障碍,无严重的认知障碍和精神疾病,生命体征稳定.
2)排除标准:发病前有精神疾病,卒中前已有痴呆表现,严重的认知障碍及失语,或伴有心、肺、肝、肾等重要器官严重疾病,有影响功能恢复的神经肌肉骨骼病变,临床不能配合治疗者.
根据上述标准,最终筛选出6例病例接受实验,其中男患者4例、女患者2例,详细情况如表1所示.同时筛选4例患者进行对比试验,即这4例患者只进行传统的康复训练.所有筛选病例均自愿参与并配合试验.

表1 受试者基本信息
在试验展开前,医护人员对试验的内容及安全性进行了测试,确保患者的安全.本研究提供的康复训练不会对患者产生副作用,符合南京同仁医院伦理委员会及相关机构的要求.
3 实验结果与分析
3.1 机器人训练结果与分析
康复训练实验场景如图2所示,受试者在进行康复训练.取一例受试者的康复训练信息进行分析,结果如图3、图4所示.图3为“十”字康复训练结果,其中图3a为关节误差2,图3b为关节转矩2,图3c为关节误差3,图3d为关节转矩3.图中蓝色实线为第1次康复训练结果,红色实线为1个月之后的康复训练结果.从图3a和3c中可以看出,经过1个月的康复训练,受试者康复训练时的关节误差有所降低,误差波动减少减弱,绝对峰值呈降低趋势;从图3b和3d中可以看出,康复训练1个月后机器人检测的转矩大小呈减弱状态,转矩变化率降低.

图2 实验场景Fig.2 Experimental scene
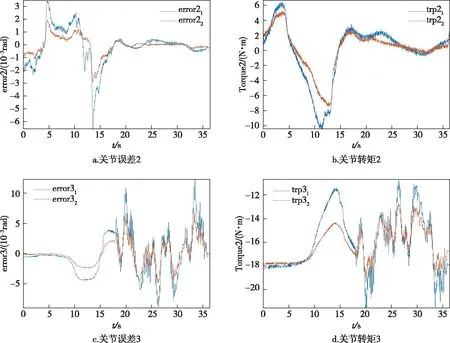
图3 “十”字康复训练结果Fig.3 Performance of rehabilitation training by marking cross with upper limb,(a) joint error 2 (b) joint torque 2,(c) joint error 3,and (d) joint torque 3
为进一步说明机器人康复训练后的效果,对该患者训练的轨迹跟踪误差和转矩信息进行分析,求解轨迹跟踪误差绝对峰值、最大误差变化率、最大绝对转矩和最大绝对转矩变化率,“十”字康复训练结果如表2所示.由表2可知,机器人康复训练后,受试者康复训练时的误差总体变化减小,误差绝对峰值下降,最大误差变化率减少,患肢病情的不确定性对康复训练过程的干扰减少,最大绝对转矩降低,最大绝对转矩变化率减少,患肢的康复训练前由于肢体不受控制,存在频繁颤动,康复训练后,颤动减少,肢体功能增强,康复训练运动过程更加稳定.

表2 “十”字康复训练
图4为“米”字康复训练结果,其中图4a为关节误差2,图4b为关节转矩2,图4c为关节误差3,图4d为关节转矩3.图中蓝色实线为第1次康复训练结果,红色实线为1个月之后的康复训练结果.从图4中可以看出,在康复训练开始时,机器人牵引患者手臂康复训练时的误差,即图4a和4c中蓝色实线,均有比较尖锐的峰值,变化趋势陡峭、锯齿状明显,康复训练后误差峰值降低,波动有所变缓;转矩在康复训练前后变化比较明显,图4b和4d中的红色实线直观显示转矩最大绝对值明显降低,且波动变化趋于平缓.

图4 “米”字康复训练结果Fig.4 Performance of rehabilitation training by marking “*” with upper limb,(a) joint error 2,(b) joint torque 2,(c) joint error 3,and (d) joint torque 3
表3为“米”字康复训练后的结果分析.由表3可知,康复训练后误差绝对峰值下降,最大误差变化率减少,患肢更能跟随机器人的康复轨迹.同时最大绝对转矩降低,最大绝对转矩变化率减少,患肢的康复训练变得更加柔顺,随意运动减少.

表3 “米”字康复训练
3.2 康复医师评估结果与分析
受试者在接受康复训练之前,康复医师对每位受试者进行康复评估,评定每位受试者的Brunnstrom分期等级,评估结果如图5中蓝色条形所示,接受1个月的康复训练后,每位受试者的康复程度评估结果如图5中橙色条形所示.图5a表明参与机器人康复训练的患者Brunnstrom分期等级增加更加明显,各位受试者患肢情况都有所好转,其中受试者2和受试者4的Brunnstrom分期等级增加较多.图5b表明传统康复训练中受试者Brunnstrom分期等级增加较少,其中受试者1和受试者4的Brunnstrom分期等级没有增加.由图5可知WAM机器人的康复训练效果优于传统的康复训练.
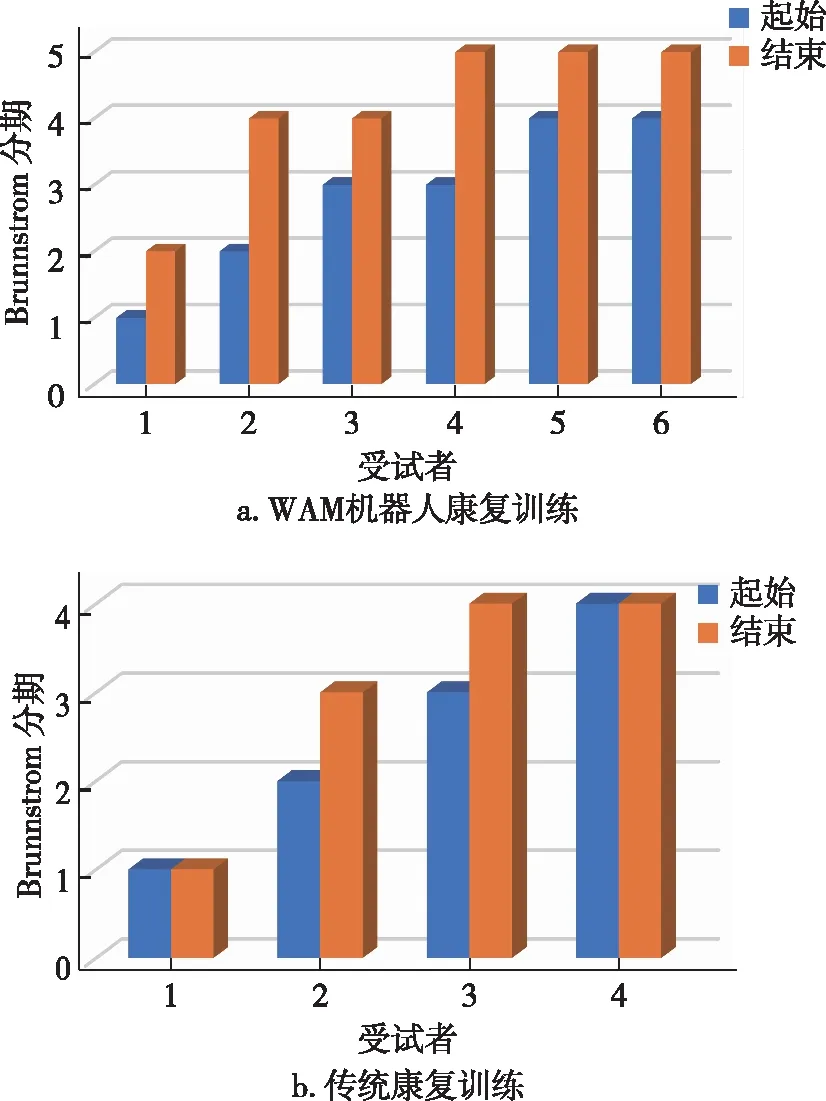
图5 康复评估医生评估结果Fig.5 Rehabilitation performance appraised by doctors,(a) robot-assissted rehabilitation training,and (b) conventional rehabilitation training
4 结束语
本研究运用WAM机器人平台对上肢偏瘫患者进行为期1个月的康复训练,分析康复训练前后WAM机器人牵引患者进行康复训练时的关节误差与转矩,并对康复训练前后患者的Brunnstrom分期等级进行评定,结果表明接受WAM机器人康复训练患者的康复进度优于传统康复训练,WAM机器人可为中风患者提供合理的康复训练方式.
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
中华骨与关节外科杂志(2022年1期)2022-08-31
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
中华养生保健(2021年18期)2021-02-13
新传奇(2019年40期)2019-11-01
电机与控制学报(2018年9期)2018-05-14
中国实用医药(2017年6期)2017-04-24
现代养生·下半月(2016年4期)2016-10-21