消费级无人机倾斜摄影技术难点研究
2021-06-30 03:33张亚南
科技风 2021年11期
关键词:倾斜摄影测量

摘 要:对大部分小型影视动画、建筑设计公司来说,倾斜摄影制作的实景三维模型,不仅是项目展示的最好平台背景,也是获取项目数据与参数的重要来源。但是,五镜头倾斜摄影无人机价格较贵、使用要求較高,一般公司若不开展测绘相关工作,配备此类无人机并无必要。而一般设计公司都会购买轻型无人机进行项目环境拍摄、现状航拍等,本文提出利用轻型的单镜头无人机,采用小航高、5向航线设计、高重叠率的方法拍摄倾斜照片,配以二次空三解决模型瓢、斜、重面问题,再辅以三维软件进行模型修补,从而实现高质量实景模型。以某车辆段工程为实践,对该方法进行了验证,结果表明,该方法精度完全满足项目需要,模型质量好且作业效率高。
关键词:消费级单镜头无人机;倾斜摄影测量;模型修补
1 绪论
随着倾斜摄影技术的逐渐普及,实景三维模型越来越多的运用到项目展示、BIM模型演示平台制作、影视动画制作中,它能多视点的对现场数据进行收集,建立具有真实尺寸与地理坐标的现场模型,客观地反映地表情况,满足人们对三维信息的需求。但对于大部分小型影视动画公司、建筑设计公司来说,他们的项目范围大都为几栋楼、一个街区、1~2千平方米,为了这种小项目,专门采购多镜头测绘级无人机制作实景模型即不必要成本也相对太高。而采用低成本的单镜头消费级无人机进行倾斜摄影拍摄,并利用技术手段弥补单镜头摄影的缺陷,制作出合格的实景三维模型,将极大的促进实景三维模型的应用范围,在城市三维建模、项目前期查勘、项目规划预设计等领域发挥重要作用。
本文基于某城市地铁车辆段设计工程,探讨了使用消费级、单镜头、低价格、轻型无人机进行倾斜摄影测量制作三维实景模型,并通过改进相关作业方法,使用技术手段提高模型质量,降低无人机倾斜摄影测量的应用门槛。
2 项目概况
本文研究项目为某市地铁规划车辆段工程,地块现状已完成拆迁,项目东西各有已建成的多栋约20层楼的住宅建筑。建模范围东西长约1500米,南北宽约500米,周边预留安全边界,拍摄范围约1平方公里。(图1)
3 拍摄难点及解决方案
3.1 拍摄器材
次项目航拍采用大疆Inspire1悟pro无人机,该机为四轴飞行器,最大飞行速度18m/s,最大飞行高度2000米。该机最大的优势是搭载了禅思X5航拍相机,该相机采用了微型4/3的大尺寸传感器,像素1600万,能捕捉非常清晰的画面和丰富的细节,成像质量很好。但正由于该机追求的是卓越的拍摄质量,因此整机重量较大,导致滞空时间短,最大飞行时间只有18分钟,预留20%电力作为安全备用,再除去到达航点与返航时间,真正的作业时间仅10分钟左右,以航向和旁向均85%的重叠率计算,一次航程只能拍摄0.2平方公里的范围。为了最大利用无人机的有效飞行距离,在本次拍摄中对三块区域分别设置了1个起飞点,以使无人机升空后能尽快到达作业点开始拍摄工作。
3.2 现场建筑高差大
由于拍摄场地周边建筑高差达到60米,而本项目又是低空拍摄(设计航高120米),因此,如果全场飞行保持同一高度,当无人机飞到相对比较高的楼宇区时,在无人机视场角不变、飞行高度不变的情况下,相对航高将由120米减小到60米,这会导致单张照片覆盖的范围变小,进而导致相邻照片的重叠率变小。当重叠率小到一定程度时,就会导致空三失败。因此,我们对不同区域采用了不同的飞行方案(图1、图2):1区,由于区域内都是低矮的植物及部分平房建筑,采用100米航高正顶视镜头一次拍摄;2区小区高楼,采用五向拍摄,即对同一区域飞行5次,分别采集1正射+4个方向倾斜的数据,并在正顶视飞行时加高航高到120米,增大重叠率为90%。
4 建模难点及解决方案
由于本次飞行使用的无人机不带RTK模块,无法提供精准定位能力,且由于项目周期及成本原因,现场也没有做像控点,以及一块场地多点起飞、多次组合飞行等原因,为后期的建模工作造成了很大的难度。
4.1 空三问题
由于本次使用的无人机只能使用机载GPS进行定位,定位精度较差。当无人机完成一块电池飞行,返回启航点更换电池后延续原航线飞行时,往往不能准确到达上次结束的位置,从后期空三文件来看,前后两次的飞行轨迹平面位置偏差有3—5米,高度方向偏差达到5—10米!
本次实景模型建模使用bentley公司的ContextCapture软件进行建模,ContextCapture空三对原始相片的画面质量和定位精度要求较高,因此,本项目在空三阶段就出现空三不过的问题。
因此,我们使用了Photoscan软件进行空三运算。PhotoScan是一款基于影像自动生成高质量三维模型的实景建模软件,具有较强的空三处理能力,并能将生成的空三文件导出为别的软件所用。计算步骤为:
(1)photoscan中导入所有航拍影像;
(2)选择两次航拍的重合位置,找寻明显的标志点,如路沿石的转折点,花坛的角点等,对此标志点进行像控点连接;
(3)空三运算,生成密集点云;
(4)把密集点云文件导出为blocks exchange格式,再把这个文件在ContextCapture中加载,再次空三,通过。
4.2 模型修模
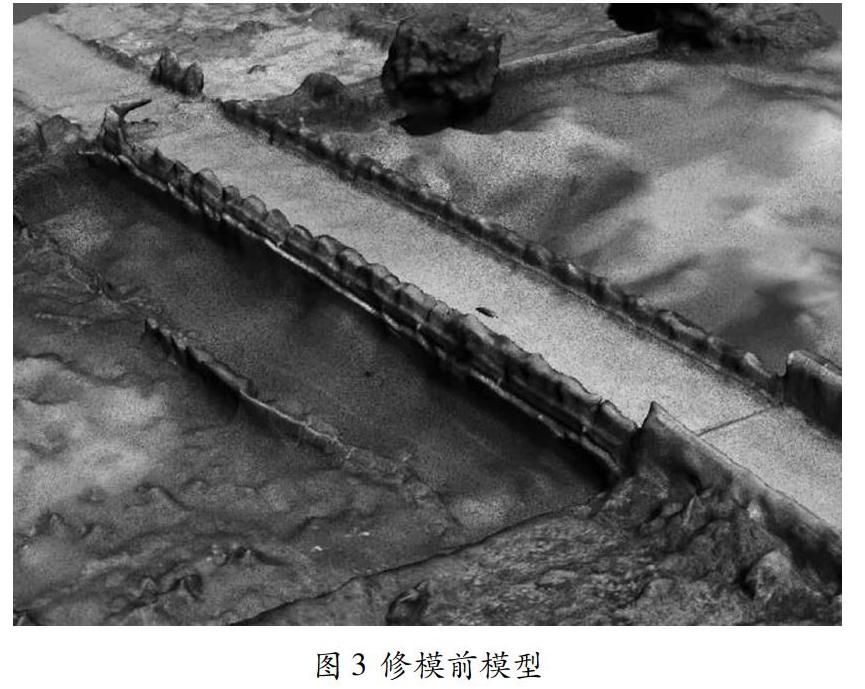
实景建模,对于细小的物体、水面等的建模是一大难点,自动生成的模型往往有模型扭曲、破面等问题,特别是对于本项目采用的消费级无人机拍摄影像所建模型,这类问题更加严重(图3)。这些问题仅凭对ContextCapture的优化是很难解决的。因此,必须通过三维软件进行修补,本项目中,我们采用3DMAX软件对生成的模型进一步修整。步骤为:
(1)ContextCapture空三完成后,要对模型进行规则平面网格切块,每块大小必须考虑效率与效果,如果分块太大,每块修模时会占用过大的内存资源,影响软件运行效率。而分块太小又导致模型切分太多,修模数量太大,影响修模效率。可以参考内存占用量,以不超过内存占用90%为标准进行分块大小设置;
(2)ContextCapture选择生成三维网格,导出分块obj格式模型;
(3)3DMAX导入分块模型。3DMAX具有丰富的三维模型处理工具与方法,针对模型的具体问题可以采用补、删、挤、拉等手段对模型进行修整;
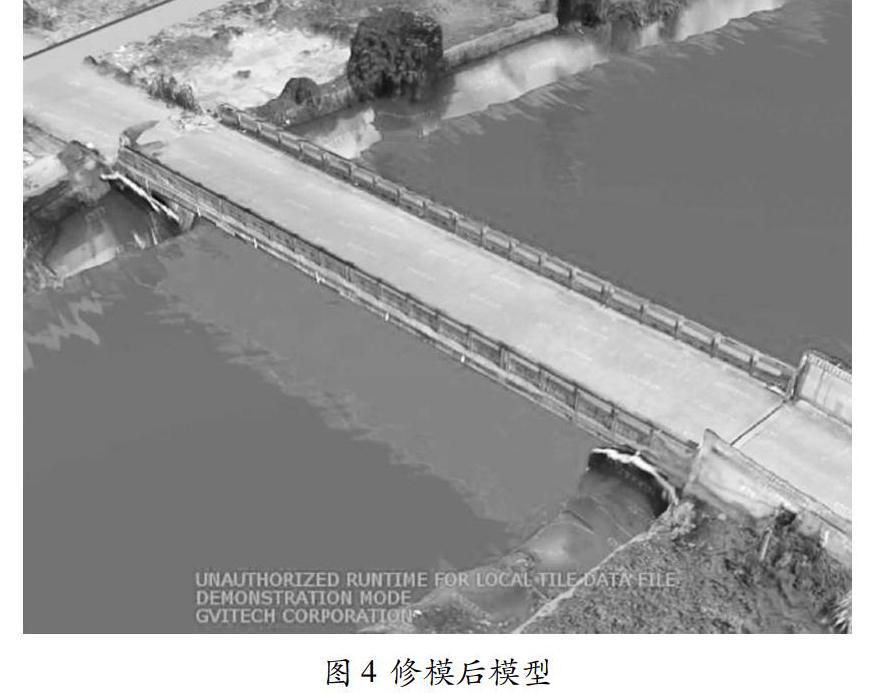
(4)修整完成的模型再次导入ContextCapture,提交更新,生成即可(图4)。
5 模型质量
对完成的模型进行网格分析与影像分析,采用本流程完成的三维实景模型,影像真实清晰、整体结构准确,除楼宇顶部由于与地面的重叠率相差较大,有部分扭曲外,整体满足了预期要求。本方法还可根据项目需要对模型的建构筑物以及场平进行调整,是一种可行的倾斜摄影数据采集及建模方案。
6 总结
本研究采用了利于普及的小成本、不需专业测绘技术的方法实现倾斜实景模型的制作。但由于受消费级无人机电池容量、飞行速度、定位精度的影响,本方法只适用于1平方公里左右的小范围实景模型制作。本研究的方法,对非专业测绘制作公司、应急项目、技术方案探索等应用场景,制作实景三维模型具有很强的适用性,具有巨大的发展潜力。
参考文献:
[1]李翔,全昌文,陈霖.消费级无人机倾斜摄影数据采集方法研究.测绘,2016(06):263265+280.
[2]许承权,黄小琴,施政.消费级无人机倾斜摄影测量1∶500测图方法及精度研究.测绘地理信息,2020(01):117120.
[3]吴献文,张鹏,曾琳.基于消费级无人机倾斜影像的三维测图技术探讨.测绘通报,2019(07):9295.
作者简介:张亚南(1974— ),男,汉族,四川自贡人,高级工程师,从事GIS\\BIM应用研究。
猜你喜欢
山东工业技术(2018年17期)2018-10-27
科学与技术(2018年27期)2018-06-17
电子技术与软件工程(2018年5期)2018-04-09
魅力中国(2017年52期)2018-01-20
科学与财富(2017年29期)2017-12-20
科技资讯(2017年26期)2017-11-08
科技创新导报(2017年23期)2017-10-25
科技创新导报(2017年19期)2017-09-13
科技资讯(2017年18期)2017-07-19
科学与财富(2016年36期)2017-07-09