
基于双姿态传感器的关节运动角度测量方法
2021-07-01 08:51肖飞云
合肥工业大学学报(自然科学版) 2021年6期
卢 涛,王 勇,肖飞云
(合肥工业大学 机械工程学院,安徽 合肥 230009)
0 引 言
人体关节角度检测在康复医疗、体育运动、实时监护等领域都非常有应用价值。在康复医疗领域,对关节极限角度进行检测,可以为医生的临床诊断、病人的康复效果评估提供重要参数[1-3];在体育运动领域,对关节运动规律捕捉[4-5]分析,可以为运动员的训练方法提供科学指导;在实时监护领域,获取关节运动信息可以为老年人、康复期患者的跌倒风险评估[6-7]、步态检测[8]等提供重要依据。关节运动角度测量方法主要有光学传感器测量法、惯性传感器测量法、角度传感器测量法3种。文献[9-10]基于光学传感器捕捉载体表面标记点,建立全局坐标系,进而确定载体在全局坐标下的姿态角度,测量精度高;但是操作复杂、测量环境要求高。文献[11-12]利用2个加速度传感器的单轴与双轴分量测量膝关节角度,可以达到较高的精度;但是要求传感器某轴与关节转动轴线必须保证平行,实际安装难以实现。目前关节运动角度多数依靠霍尔磁性角度传感器直接测量,该方法由于角度传感器与关节转动中心难以重合、杆件滑动等问题易产生较大的误差,对安装方式有极高的要求。在姿态角检测研究上,文献[13-14]将加速度计、陀螺仪、磁力计等惯性传感器组合使用,基于改进的卡尔曼滤波、互补滤波方法和融合算法,可以实现对姿态角的精确测量,这为关节运动角度的测量开拓了一种新思路;但是关于运用检测到的姿态角来解算关节相对运动角度的研究很少。
针对关节运动角度测量精度易受传感器安装姿态等因素影响的问题,基于姿态传感器能准确测量载体姿态角的基础上,本文提出了一种基于双姿态传感器的关节角度测量方法。该方法采用的姿态角测量系统主要由姿态传感器与上位机组成,2个姿态传感器分别用绑带与双臂固定,通过建立数学模型,对返回的姿态角进行解算,可以求得精确的肘关节相对运动角度。此外,该方法对姿态传感器绑定的位置没有要求,实施简单,装置体积小、稳定性好。
1 姿态角测量系统
1.1 姿态角测量系统整体框架
整个姿态角测量系统由2个姿态传感器节点、1个肘关节转动中心节点和1个上位机组成,如图1所示。

1.上位机 2.姿态传感器Ⅱ 3. 肘关节转动中心 4.姿态传感器Ⅰ 5.蓝牙接口
2个传感器节点分别固定在人体大臂、小臂,用来采集相应部位的姿态数据。完整的姿态数据采集后,传感器节点通过蓝牙发送给上位机。上位机负责记录并处理所有原始数据,对原始数据进行解算,进而得到肘关节运动角度。
1.2 传感器节点设计
本研究采用型号为BWT901CL的九轴(无线蓝牙)姿态传感器。该传感器由传感器模块和蓝牙接口模块组成,传感器模块集成了高精度的陀螺仪、加速度传感器、磁阻传感器,内部采用高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,能够快速求解出模块实时运动姿态。先进的数字滤波技术能够有效降低测量噪声,提高测量精度;姿态解算器配合动态卡尔曼滤波算法,能够在动态环境下准确返回当前姿态角,测量精度静态0.05°、动态0.1°,稳定性高。
该传感器进行姿态角解算时,使用东北天惯性坐标系,旋转方向按右手法则定义,即右手大拇指指向轴向,四指弯曲的方向为绕该轴旋转的方向。滚转角Roll即为绕x轴旋转的方向角,俯仰角Pitch即为绕y轴旋转的方向角,偏航角Yaw即为绕z轴旋转的方向角。其欧拉角表示姿态时的坐标系旋转顺序定义为z→y→x。
2 测量原理
在大臂上固定姿态传感器Ⅰ,在小臂上固定姿态传感器Ⅱ;定义惯性坐标系O(东北天坐标系),在位置1定义连杆坐标系A固连于姿态传感器Ⅰ,连杆坐标系B固连于姿态传感器Ⅱ, 在位置2定义连杆坐标系A′固连于姿态传感器Ⅰ,连杆坐标系B′固连于姿态传感器Ⅱ;定义连杆坐标系与惯性坐标系原点重合,连杆坐标系同惯性坐标系之间的转换用欧拉角描述。


(1)
由(1)式可知:
(2)


(3)
由(3)式可知:
(4)
在位置2中定义辅助坐标系S,该坐标系为连杆坐标系B随连杆坐标系A作相同变换后形成的连杆坐标系。坐标系变换过程如图2所示。
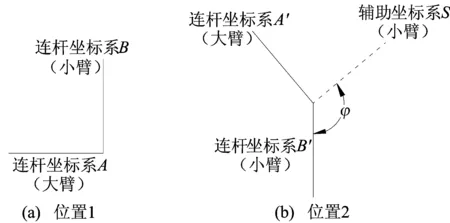
图2 坐标系变换过程
设连杆坐标系S与辅助坐标系B′间的变换矩阵为R′;设存在点C在连杆坐标系B′中坐标为PC′,在辅助坐标系S中坐标为PC。在连杆坐标系A′中可用如下2种方法对C点进行描述:
(5)
由(5)式可知:
(6)
由(2)式、 (4)式、 (6)式可知:
(7)
变换矩阵R′应有下列格式:
(8)
连杆坐标系B′相对于辅助坐标系S以肘关节回转轴为等效转轴,以肘关节相对运动角度为等效转角[15]。
根据其变换矩阵可以求得等效转角,即肘关节运动角度φ为:
(9)
肘关节实际角度θ2为:
θ2=θ1+φ
(10)
由于该传感器在用欧拉角表示姿态时的坐标系旋转顺序定义为z→y→x,若坐标系N与参考系M初始方位相同,N绕zN轴转γ,然后绕yN轴转β角,最后绕xN转α角,则N相对于M的旋转变换矩阵[16]为:

(11)
变换矩阵通式为:

(12)

3 实验分析
为了验证上述测量方法的准确性与可行性,本文分别进行了静态验证实验与动态对比实验。在静态验证实验中,受试者穿戴一种可调式肘关节固定支具,该支具可以辅助实现肘关节在任一固定角度范围内变化,对转动固定角度后不同姿态下返回的欧拉角进行解算,以该支具的转动角度作为肘关节相对运动角度参照,对比解算结果,对上述测量方法进行验证。在动态对比试验中,首先搭建了一套霍尔角度传感器角度测量平台,受试者先穿戴一种霍尔角度传感器角度测量装置,该角度测量装置与上位机进行连接后,通过ATK XCOM串口可以对角度数据进行实时读取与保存;将该角度测量装置返回的肘关节角度数据绘制成随时间变化的曲线,同一动态过程中,与双姿态传感器解算的关节角度曲线对比,达到对上述测量方法验证的目的。
3.1 静态实验
将姿态传感器与上位机连接后,配置姿态传感器参数,设置波特率为9 600 bit/s,回传速率为10 Hz。考虑到 9轴算法中采用加速度传感器和磁阻传感器,而以当地重力加速度和地磁向量作为参照计算载体姿态角静态特性较好,不存在累计误差,因此选择9轴算法,先对传感器进行加速度校准,然后在没有环境磁场的干扰下进行磁场校准。给受试者穿戴可调式肘关节固定支具,用绑带将2个姿态传感器分别固定在大臂与小臂随机位置,如图3所示。安装时,保证可调式肘关节固定支具不会相对手臂滑动,保持支具转动中心与肘关节转动中心重合。

图3 双姿态传感器肘关节角度测量静态实验
定义支具的角度在180°~θ2范围内变化。在大臂与小臂呈180°时某一姿态下标定初始位,设标定位置为位置0,此时姿态传感器Ⅰ返回滚转角α10、俯仰角β10、偏航角γ10,姿态传感器Ⅱ返回滚转角α20、俯仰角β20、偏航角γ20;在肘关节转动φ后,在极限位置θ2时的不同姿态下,记录姿态传感器Ⅰ、传感器Ⅱ返回的姿态角。
本次实验在标定了初始位后,在θ2=150°、120°、90°、60°时分别记录了5组姿态角数据,并且运用Matlab软件对采集的数据进行了编程计算,具体实验数据及计算结果见表1所列。

表1 双姿态传感器肘关节角度测量实验数据 (°)
从表1可以看出,以可调式肘关节固定支具转动角度为参照,在静态下采用双姿态传感器对肘关节运动角度进行测量,测算角度均值与实际值的差值小于0.5°,由此可知,基于双姿态传感器的关节运动角度测量方法是非常准确的。实验过程中,虽然尽可能地使支具转动中心与肘关节转动中心重合,以此来保证参照数据的可靠性,但是肘关节在运动过程中,其转动中心本身就会发生微量偏移,对实验数据造成一定影响,但是该误差在允许的范围内。
3.2 动态实验
将姿态传感器与上位机连接后,配置姿态传感器参数,设置波特率为115 200 bit/s,回传速率为100 Hz。考虑到6轴算法是通过陀螺仪测量载体旋转过程中的角速度,并对角速度进行积分得到载体姿态角,在动态环境下不容易受到载体运动加速度和环境磁场的干扰,因此选择6轴算法进行加速度校准,z轴角度置0。
给受试者穿戴霍尔角度传感器角度测量装置,连接好上位机后设置波特率为115 200 bit/s,频率为100 Hz。
用绑带将2个姿态传感器分别固定在大臂与小臂随机位置,如图4所示。安装时,保证霍尔角度传感器角度测量装置两杆件不会相对手臂滑动,保持装置转动中心与肘关节转动中心重合。

图4 双姿态传感器肘关节角度测量动态实验
在大臂与小臂呈180°时某一姿态下开始对姿态传感器记录数据,在肘关节发生由伸直到弯曲再到伸直的至少1个周期转动后停止数据记录并保存。读取肘关节呈180°时姿态传感器的一组稳定数据作为标定的初始态。保存霍尔角度传感器角度测量装置测量的窗口数据。在Matlab软件中对实验数据进行计算处理,可以得到双姿态传感器和霍尔角度传感器测量肘关节运动角度的对比曲线,如图5所示。
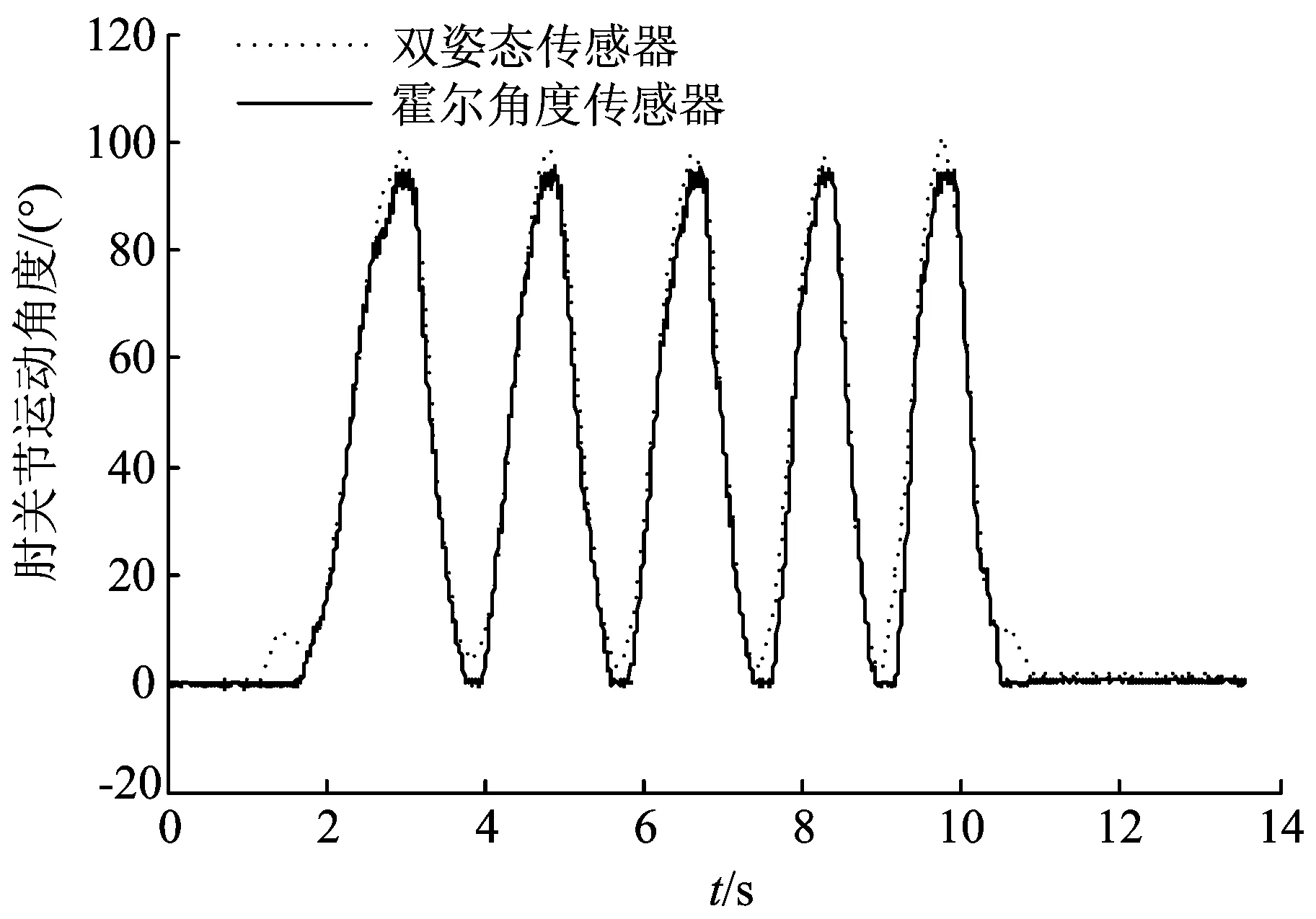
图5 肘关节运动角度测量结果对比
从图5可以看出,采用双姿态传感器对肘关节运动角度测量的曲线与采用霍尔角度传感器对肘关节运动角度测量的曲线基本重合。对2组数据的结果进行统计分析可知,均方根误差为2.392,相关系数为0.93。曲线在拐角处的误差是当运动方向突变时,姿态传感器相对于非刚性的人体和衣物会继续发生微小的位姿变化、肌肉会发生形变等因素造成的。运动过程中肘关节转动中心本身发生的微量偏移也会对实验数据造成一定的影响。在实际测量应用中,这些误差在可接受的范围内。
4 结 论
(1) 本文提出了一种基于双姿态传感器的关节运动角度测量方法,利用肘关节运动角度等于2个参考坐标系绕等效转轴转动的等效转角,通过姿态传感器采集姿态角数据解算出关节运动角度,并且建立了关节运动角度测量的数学模型。
(2) 在静态实验中,以可调式肘关节固定支具转动角度为参照,对双臂姿态角数据进行采集,并依据建立的数学模型运用Matlab软件进行编程计算,验证了双姿态传感器测量关节运动角度的准确性。
(3) 在动态实验中,搭建霍尔角度传感器角度测量平台,将双姿态传感器与霍尔角度传感器的测量结果进行对比,进一步说明了该方法测量结果精确,对传感器安装姿态没有任何特殊要求,便于实施,在关节运动角度测量中有较高的应用价值。
猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31
保健与生活(2022年13期)2022-07-06
导航定位学报(2022年2期)2022-04-11
中华骨与关节外科杂志(2021年6期)2021-12-05
运动精品(2020年11期)2020-11-22
汽车实用技术(2018年2期)2018-05-24
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
浙江中医杂志(2004年10期)2004-03-08
