
基于PLC的高空施工作业车电气控制系统分析
2021-07-04 12:44榆林职业技术学院高勇
河北农机 2021年6期
榆林职业技术学院 高勇
1 高空作业车的构成
在现有的建筑领域中,高空作业车大多由一般动力系统、液压系统、电气控制系统、转向装置、行走装置、回转装置、作业斗横向摆动装置、伸缩臂变幅装置、操作装置、作业斗自动调平装置和安全装置等结构构成。在操作方式上,现有的高空作业车通常有总台控制、地面控制和吊篮控制三种操作方式。其中总台控制主要是控制动力的启动与停止,对吊篮的手动调节以及对地面控制和吊篮控制的选择。同时还具备一些检测指示,用以保证高空作业车的平稳运行。相较于总台控制而言,地面控制设置有急停按钮,当高空作业车发生意外时,只要按下紧急制动按钮,高空作业车就会停止作业,大多用以保证施工安全。吊篮控制主要针对于高空作业车吊篮的上下运行。
目前,高空作业车需要实现的功能有行走、主体回转、支腿升降、大臂的提升与下降、大臂的伸缩、小臂的提升与下降、吊篮的旋转等。这些功能在目前的高空作业车中都能够实现,在运行过程中也能够较为顺利地完成施工任务,对施工的安全程度也有一定的保障。其中关于高空作业车的方向控制,例如吊篮的旋转、大臂的上升与下降、支脚动作等,都需要运用电子阀来控制。
2 高空作业车的液压系统原理
图1 是能够自行伸缩的臂式支柱性高空作业平台的液压系统原理图。由图可知,液压系统是由上车液压系统和下车液压系统共同组成的,两个液压系统之间由回转头连接,带油泵的发动机则是液压系统的主要动力。其中上液压系统主要是由工作臂变幅和伸缩系统、整车回转系统、吊篮调平系统和吊篮旋转等系统组成,而下车液压系统则是由行走系统、转向系统、支腿动作系统组成。
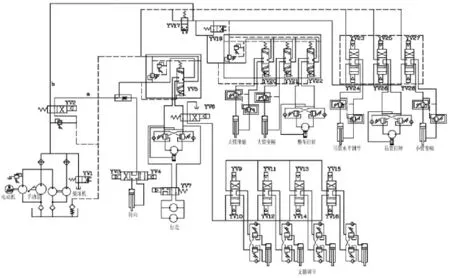
图1 液压原理图
3 PLC的型号选择
3.1 PLC型号选择
PLC控制系统在传统控制器的基础上引入了微电子技术计算机技术、自动控制技术以及通讯技术而形成的新型工业装置,主要是为了取代继电器,并实现执行逻辑,计时和计数的简单控制功能。PLC能够有效建立远程控制体系,并具有通用性较强、使用便捷、适应范围较广、抗干扰能力强的特点,在编程内容上也较为简单。
PCL在高空作业车的使用中,主要是以微处理器为核心,融合了自动控制技术,微型计算机技术以及网络通信技术等,是目前在建筑领域应用最为广泛的工业自动化装置。在对PLC编程硬件的选择上,主要选取了西门子公司的S7-200可编程控制器,相较于其他的可编程控制器而言,S7-200具有形态小、适用范围广的特点,能够有效适用于各种场合的材料检测,以及控制自动化的需要。除此之外,PCL的硬件设施主要由中央处理器、输入单元、存储器、输出单元、扩展接口、通信接口、电源等部分组成。
3.2 CPU的选择
CPU作为PCL运行的基础,在选择CPU时要兼顾PCL的工作任务以及工作强度,充分保证PCL的有效运行。因此,我们对CPU选择SIMATICS7-200CPU226模块。
CPU226优点在于能够集成24输入/16输出共40个数字量I/O点。能够连接7个扩展模块,最大甚至可以扩展至248路数字量I/O点或35路模拟量I/O点。13K字节程序和数据存储空间。6个独立的30kHz高速计数器,2路独立的20kHz高速脉冲输出,具有PID控制器,2个RS485通讯/编程口,具有PPI通讯协议、MPI通讯协议和自由方式通讯能力。
4 高空作业车的控制系统
电气控制系统是高空作业车的主要控制系统,具体操作方式是将高空作业平台检测到的装置信号输入至系统内,经过中心处理器处理后,输出到相应的继电器线圈作为不同部件动作的约束条件或者是指令条件。因此,电气系统的有效运行是高空作业车平台安全运营的有力保障。
4.1 电气控制系统的安全监测要求
安全监测过程是为了检测各个部件的功能是否能够正常运行,并将检测结果及时反馈到专业的操作人员处,使操作人员能够及时解决可能出现的问题或者进行人工操作,避免高空作业车出现运行问题。
在本次检测中,主要的检测部件有:支腿、车身、大臂、小臂、吊篮。主要监测内容有:
支腿:通过压力传感器检测支腿是否出现失稳情况,主要检测方式是微动开关,使支腿空撑进行检测。
车体:车体检测主要是通过IDXY双轴倾角传感器来检测车体的倾斜程度,或者通过行程开关来进行转台复位检测。
大臂:通过行程开关来进行大臂复位检测,或者可以通过长角度传感器来测量大臂的伸出量和角度。
吊篮:吊篮的倾斜程度主要是由单轴倾角传感器检测,吊篮的载重多少则是由力传感器检测。最后防撞检测是通过专有的防撞开关进行检测的。

图2 检测装置分布图
4.2 电气控制系统方案
在上文中我们详细叙述了高空作业车各个部件的功能和局限性,并对不同部位的安全监测方式做了较为详细的阐述。由此我们可知,目前高空作业平台的最大特点是作业频率不高,承载能力较小,但同时对高空作业车的自动化程度、安全性以及可靠性要求较高。因此,我们在设计相关的可控制编程器是需要提高控制系统的抗干扰能力以及可靠性,从而提高可控制编程的适用性。本文对可控制编程主要采用逻辑控制的方式,使得高空作业车能够在各部件完成安全监测的同时,处于一个稳定可靠安全的环境,并能够有效运行。如图3所示。从图3中我们可以看到,本文的可控制编程设计主要是由以下几大部分构成:

图3 蜘蛛式高空作业车电气控制结构图
地面控制面板的操作;动力的启停;支腿、车身、大臂、小臂、吊篮的检测。
地面控制面板的操作;吊篮控制面板的操作;S7-200;作业车的上下车的操作。
5 结论
本文所设计的可控制编程系统实现了电气控制的基本功能。当按下启动按钮之后,机器启动,控制电路接通。并以此输入命令就可以实现车辆的行走,包括高空作业车的左右转向和前后行走,对大臂动作的控制则体现在大臂的升降与伸缩方面,小臂动作则主要包括小臂的提升和下降,吊篮则是吊篮的旋转和调平。除此之外,该可控制编程还能够实现不同信号的检测,例如对吊篮的称重、调平、防撞;对支腿和底盘平衡的检测等,都能够对高空作业车的操作功能进行模仿。
猜你喜欢
科技与创新(2022年10期)2022-05-27
渤海大学学报(自然科学版)(2021年3期)2021-12-27
专用汽车(2021年12期)2021-12-24
商品与质量(2021年41期)2021-12-04
福建建筑(2021年10期)2021-11-26
汽车实用技术(2018年2期)2018-05-24
劳动保护(2014年9期)2016-01-13
建筑工程技术与设计(2015年5期)2015-10-21
汽车科技(2014年3期)2014-08-02
科学时代·上半月(2013年6期)2013-08-22
