
基于三维激光扫描技术的空间坐标传递测量及工程应用
2021-07-12 03:32胡玉祥李勇张洪德尹相宝1孟庆年
城市勘测 2021年3期
胡玉祥,李勇,张洪德,尹相宝1,,孟庆年
(1.青岛市西海岸基础地理信息中心有限公司,山东 青岛 266000; 2.青岛市勘察测绘研究院,山东 青岛 266032;3.青岛市地下空间地理信息工程研究中心,山东 青岛 266032)
1 引 言
三维激光扫描技术近几年发展异常迅速,它突破了传统的单点测量方式,能在单位时间内发射几十万甚至几百万的点,以点云的形式表达三维空间的几何形态,同时还可以采集高分辨相片,形成物体的三维正射影像,再现物体的真实三维形态[1,2],其测量成果不仅包含空间坐标信息,还包含反射率等物理信息,通过不同测站三维点云的拼接、匹配,可实现空间三维坐标的传递,对空间坐标的有效传递提供了一种新的思路。
传统三维空间传递的方法是使用导线测量或者联系测量的方式进行。导线测量是通过斜井布设导线一站一站地将平面坐标引测到地下,高程则采用几何水准测量方式引测。联系测量通常分为两井定向和一井定向,两井定向精度较高,对井口直径没有特殊要求,但实际工作中往往不具备做两井定向的条件;一井定向通过悬挂钢丝组成联系三角形将平面坐标和方位引测到地下,但其对井口直径以及现场作业条件要求较高。对于现场不具备一井定向条件,且精度要求不是很高的项目,采用联系测量方式甚至无能为力。青岛连云港路地铁勘探现场邻近某地下电力管廊,为防止勘探过程中对电力管廊可能造成的破坏,需要测定地下电力管廊的平面位置和埋深,即管廊的三维空间位置;其中重要的工作便是将地面三维坐标引测到地下。受电力井作业半径和深度限制,采用传统联系测量三维坐标引测方式不可行。针对此问题,本文借助三维激光扫描仪,在井口布设专用扫描标靶,井下扫描井口标靶,巧妙地将地面三维坐标引测到地下;通过点云数据提取电力管廊的平面图和剖面图,有效获取管廊平面位置和埋深,为类似工程提供了良好的借鉴。
2 外业扫描及数据处理
2.1 工程难点及策略
青岛地铁地质勘探临近一电力管廊,由于历史原因,该管廊没有历史资料可用。为了防止勘探对该电力管廊可能造成的破坏,需要准确测定该管廊的三维空间位置,以便制定合理、有效的钻探方案。
确定该地下电力管廊准确三维空间位置,首要工作是需要将地面三维坐标引测到地下,然后人进入到地下管廊内部进行现场施测,经内业数据处理得到其三维空间位置关系。电力管廊不同于地铁或者其他地下工程,距地面较深且有可供行人出入的专门通道;通往该地下管廊只能通过口径约为 1 m、井深约为 5 m的电力井,这给三维空间坐标的传递带来了极大的困难,这也成为本工程的难点所在。采用全站仪直接观测法根本不可能,采用联系测量方式平面坐标引测不具备条件,高程虽然可以通过悬挂钢尺的方式引测,但此方法费时、费力,加之地下电力管廊空间狭窄,对水准读数带来极大不便。井口引测示意图如图1所示。

图1 井口引测示意图
考虑到三维激光扫描仪外业采集过程不需要特殊观测条件,只要能够通视,扫描仪便可以通过高速旋转,采集可视范围内的三维空间坐标和纹理信息;扫描仪测程可以达到一百甚至几百米,在井下架设扫描仪,完全可以扫到井口,通过在井口布设3个专用标靶(标靶结构如图2所示);地面通过全站仪准确获取3个标靶中心点三维坐标,地下则通过扫描仪将井口标靶中心扫入点云中,通过测站之间的点云拼接,将井口和井下空间形成一个统一的整体,从而巧妙地将地上三维空间坐标引测到地下。作业方式如图1所示。

图2 扫描仪专用黑白标靶示意图
2.2 外业扫描
(1)分辨率选择
外业作业过程要兼顾效率和精度要求,为提高效率可以选择低密度进行扫描,但低密度扫描容易造成点云过于稀疏,细部纹理不能很好地表达;过高的密度虽然可以更好地表达细部纹理,但比较费时且更后续数据处理带来不便。本工程项目主要关注地下电力管廊的三维空间位置信息,对于纹理信息要求不高,结合表1性能参数,兼顾精度要求,本项目可以采用中密度扫描模式;为了后续点云匹配的方便,在扫描过程中采用拍照模式。

三维激光扫描仪性能参数 表1
为了将地面三维空间坐标准确引测到地下,需要准确获取井口3个标靶中心点的三维坐标,地面可以采用导线测量或者后方交会方式准确获取标靶中心点坐标。井下第一站扫描过程中需要将井口3个标靶转向下方(如图3所示),从而将标靶扫入点云中方便坐标传递。

图3 井口标靶示意图
2.3 数据预处理
(1)点云拼接与去噪
点云拼接是将多站扫描数据拼接到一个整体的过程,采用徕卡配套的专用拼接软件REGISTER 360进行,一般有两种方式:基于公共点的拼接和基于点云视图的拼接[2,3]。由于地下电力管廊的相似度较高,采用视图拼接难度较大,故采用基于公共标靶的拼接方式,在RTC360点云拼接中,每站拼接完均可以得到点云匹配的相关精度信息,如图4所示;将不同测站点云通过拼接可以得到电力管廊的整体效果图,如图5所示。
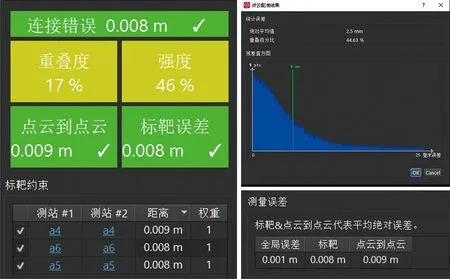
图4 点云拼接精度信息

图5 点云拼接整体效果图
点云融合就是将不同站点、不同仪器设备的点云数据合并在一起的过程,在外业扫描过程中,每站都会有很多的重合点云数据,将各站点云数据拼接在一起就造成点云数据的重叠,点云融合的目的就是根据点云归一化算法将重叠点云进行优化的过程。
在扫描仪的原始点云中往往包含若干对于成果处理有不良影响的点,点云去噪就是根据一定的点云滤波算法,让有效点保留,无效点删除的过程,由于地下管廊空间狭小、湿度大,空气中悬浮液体小颗粒,扫描过程中由于空气散射、折射容易生成漂浮、散乱点云,通常采用八叉树、空间单元阈值函数等[7,8]方法自动剔除空间散乱点云;通过点云自动滤波剔除无效点云后还应进行全面的检查,对于细节部分还需要进行人工精细剔除点云。
(2)三维坐标匹配
通过上述点云拼接的过程,整个电力管廊形成了一个空间整体,但此整体是相对的,还需要进行点云的绝对定向。绝对定向的过程即是进行坐标转换的过程,通过三个标靶中心的空间坐标来计算转换参数,转换过程通常利用布尔莎7参数模型,即:
(1)

2.4 电力管廊平剖面绘制
徕卡专业点云后处理软件Cyclone具有良好的可扩展性,通过开发相应的插件可以实现点云数据与一些专业绘图软件(AutoCAD、EPS、MicroStation、ArcGIS等)进行互通。将经过上述处理的点云加载到插件Cloudworx中,进行坐标系的旋转和网格建立,定义参考面,使得点云便于人眼识别提取,然后利用Cyclone进行点云的切片处理;在CAD中绘制电力管廊的平面图和剖面图(带有绝对坐标),如图6、图7所示。

图6 电力管廊地下平面图

图7 电力管廊地下剖面图
3 精度验证及分析
本工程中,通往电力管廊首尾各有一个电力井,如果具备条件可以在两个井口各摆设3个标靶,通过一站一站扫描,将首尾井口标靶连成一个整体,这样可以以一个井口作为检核,提高施测的精度和可靠性。然而,本工程由于尾部井底全是淤泥,在地下作业过程中无法接近井口底部,因而无法将井口标靶扫描到点云中,但此井口可以通过远处扫描将其扫到点云中。为验证该手段传递空间坐标的有效性和可靠性,将尾部井口摆设的三个标靶中心坐标准确测定,从而可以拟合出此井口中心三维坐标(方式一,可认为井口三维坐标真值);同时在点云中提取出尾部井口点云,通过点云后处理软件Cyclone中的空间拟合功能,拟合出尾部井口(图8),进而提取出拟合圆的三维中心坐标(方式二)。

图8 点云拟合电力管井口示意图
将方式一和方式二拟合的井口中心坐标进行对比,两种方式的较差如表2所示。
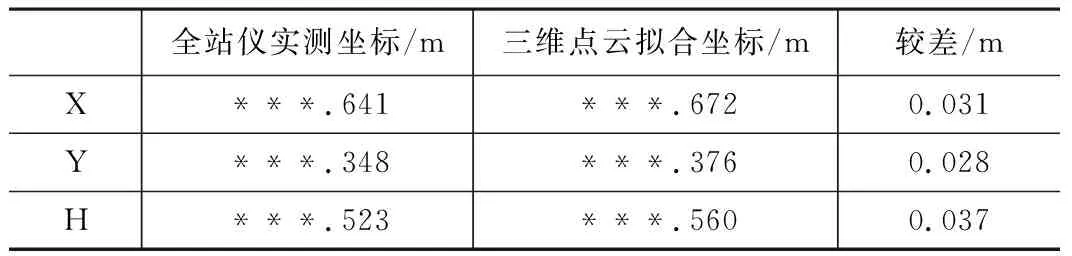
两种方式管井坐标对比 表2
从表2中可以看出,通过两种方式拟合的三维坐标较差在 3 cm左右,完全满足《城市测量规范》(CJJ/T8-2011)及项目测绘精度要求。
4 结 论
三维激光扫描技术可以在单位时间内获取精度高、数据量大的三维空间信息,它以三维坐标为整体,能够将空间物体真实还原,加之配赋坐标信息即可得到三维立体空间形态。针对电力管廊三维坐标传递困难、传统方法难以实施的难题,本文借助三维激光扫描技术,以某一地下电力管廊三维空间位置测定项目为例,从项目难点和对策、扫描作业方法以及关键技术手段进行了探讨,在项目实施过程中得到了一些有益结论:
(1)针对电力管廊井口小、井深浅,联系测量传递坐标无法实施时,可以考虑使用三维激光扫描技术手段进行空间坐标的引测。
(2)外业扫描站与站之间通过公共特征点进行联系,精度取决于点云拼接精度;不相邻测站之间不存在误差累计,提高了地下管廊整体测绘精度。
(3)通过一个井口传递坐标,点云绝对精度取决于井口标靶坐标配赋精度,由于井口直径较小,坐标配赋精度较差,不利于点云绝对精度的提高。
(4)此项目虽然有首尾两个电力井可以使用,但尾部井口地下部分不具备扫描标靶条件;如果具备条件,利用两个井口的标靶进行坐标配赋不仅可以相互检核,同时可以提高整体点云绝对精度。
(5)采用三维激光扫描设备进行外业测量时,如果具备条件,可以采集部分离散特征点三维坐标作为检核,以验证扫描的准确性和可靠性。
猜你喜欢
载人航天(2021年5期)2021-11-20
模具制造(2019年3期)2019-06-06
少先队活动(2018年5期)2018-12-29
阅读(科学探秘)(2018年4期)2018-05-14
测绘工程(2018年3期)2018-03-20
行政事业资产与财务(2016年10期)2016-09-26
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
测绘学报(2015年4期)2015-01-14
大地测量与地球动力学(2014年3期)2014-02-13
