
基于线性霍尔误差补偿的高速永磁同步电机转子位置检测技术
2021-07-14 02:04王晓琳刘思豪顾聪
电机与控制学报 2021年7期
王晓琳, 刘思豪, 顾聪
(南京航空航天大学 自动化学院,南京 211106)
0 引 言
高速永磁同步电机(high-speed permanent magnet synchronous motor,HSPMSM)具有体积小、功率密度高、调速范围广、动态性能好等优点,在工业和生活领域得到了广泛应用[1-4]。高速电机的性能依赖于精确的转子位置[5]。传统的转子位置获取方法包括光电编码器、旋转变压器以及霍尔元件等机械式的位置传感器。光电编码器和旋转变压器需要与转子同轴连接,高速运行时影响转子的结构强度和动平衡。无位置传感器算法避免了安装位置传感器所带来的一系列问题,在过去数十年间得到了广泛探究[6-10],常用的无位置传感器算法包括:直接计算法[6]、滑模观测器[7]、高频信号注入法[8]、模型参考自适应法[9]。无位置传感器算法复杂,导致系统的实时性不够,且难以实现电机的全速域运行。线性霍尔成本低,体积小,位置获取简单,无需和转子同轴安装,高速下能够兼顾成本和性能。
采用线性霍尔检测转子位置,容易受到诸多非理想因素的影响。文献[11-16]为滤除线性霍尔信号中的谐波分量,设计了各种滤波器,包括低通滤波器(LPF)、自适应陷波器(ANF)、扩展卡尔曼滤波器(EKF)。但是滤波器的加入会导致位置信号的相移,造成一定的位置误差,且随着转速的改变而改变,难以补偿。文献[17-18]为滤除线性霍尔信号中的直流分量,利用4个线性霍尔位置传感器对称安装,构成两对差分信号,该方法对线性霍尔元件的安装位置和灵敏度的一致性要求较高。文献[19]采用有限元的方法对电机的气隙磁场进行了仿真分析,并通过实验验证了霍尔元件选择合适的安装位置可以提高其检测精度。
本文首先分析采用线性霍尔检测转子位置时,不同类型的非理想因素的影响,包括两路霍尔信号相位非正交、幅值不相等以及其中一个霍尔元件安装位置与A相绕组轴线非重合,并将上述非理想因素所造成的位置误差分为交流误差和直流误差两种形式。在此基础上,对于交流误差,本文提出一种基于坐标变换的位置误差补偿方法,通过坐标变换提取出信号中正序分量,实现对交流误差的补偿;对于直流误差,本文提出一种基于电流环特征量的位置误差自适应补偿方法,根据电流环误差特征量与转子位置误差之间的关系,自适应调整位置补偿角,实现对直流误差的补偿。最后,基于一台隐极式高速永磁同步电机进行仿真和试验,验证所提出方法的有效性。
1 线性霍尔位置检测误差分析
线性霍尔通过检测转子磁场的磁感应强度,输出随转子位置变化的正弦电压信号。如图1(a)所示,在电机上相差90°电角度安装两个线性霍尔。永磁同步电机通常采用磁场定向控制(FOC),以A相绕组轴线作为转子的起始位置,因此其中一个霍尔元件(霍尔α)安装位置需要与A相轴线重合,输出的两路正交信号uα、uβ即为转子位置的正弦和余弦函数值。通过反正切运算可得到转子的位置为

图1 霍尔元件安装位置和输出信号Fig.1 Hall installing position and output signal
(1)
由上述分析可知,当两路霍尔信号uα和uβ幅值不相等、相位非正交以及霍尔元件α与电机A相绕组非重合时,均会导致解算出的转子位置存在一定的误差,影响电机的运行性能。
为提高位置估算精度,在仿真与实验中通常选用锁相环代替反正切运算获取转子位置,原理结构如图2所示,其位置解算原理可表示为

图2 锁相环原理框图Fig.2 Principle block diagram of phase-locked loop
(2)

1.1 两路霍尔信号幅值不相等
当2个霍尔元件的灵敏度存在差异时,同样的磁感应强度下输出的电压大小不相同,导致两路霍尔信号幅值不相等。除此之外,由于安装导致的2个霍尔元件与转子的距离不相等,以及霍尔信号调理电路参数不同也会导致霍尔信号幅值不相等。此时两路霍尔信号可表示为
(3)
其中λ为两路霍尔信号幅值之差。将两路霍尔输入锁相环,可以得到
(4)

(5)
由上式可知,幅值不相等导致解算的位置信号中存在二倍基频的误差,具体波形如图3所示。

图3 两路霍尔信号幅值不相等造成的位置误差Fig.3 Position error caused by different amplitude of two hall signals
1.2 两路霍尔信号相位非正交
由于安装难以确保2个霍尔元件相差90°电角度,导致两路霍尔信号相位非正交,同理可以推导出此时解算的转子位置及其误差,如式(6)所示,其中β为两路信号的相位误差。从图4中可以看出,幅值不相等导致解算的位置信号存在一个直流和一个二倍基频的误差,即

图4 两路霍尔信号相位非正交造成的位置误差Fig.4 Position error caused by the nonorthogonal phase of two hall signals
(6)
1.3 霍尔元件α与A相绕组轴线非重合
理想情况下,霍尔元件α与A相绕组重合,但是由于安装的误差,霍尔元件α与A相绕组存在一定的角度偏差,如图5所示。假设霍尔元件α超前于A相绕组Δθr,FOC以A相绕组轴线作为实际转子位置的初始位置,造成实际转子位置滞后于解算出的转子位置一个固定角度Δθr。

图5 霍尔元件与A相绕组轴线非重合Fig.5 Hall installation error
1.4 低通滤波器的影响
为抑制谐波以及干扰信号的影响,霍尔信号采样电路中加入低通滤波器(low-pass filter,LPF),造成的位置误差为
(7)
其中:ωL为截止频率;ωe为电角速度。LPF造成的位置误差为直流形式,且随着转速的升高而增大。
2 位置检测误差补偿
由前述分析可知,两路霍尔信号幅值不相等以及相位非正交所造成的误差为交流形式,误差随转子的位置改变而改变。霍尔元件与A相绕组轴线非重合以及LPF造成的误差为直流形式,误差不随转子位置改变而改变。针对这两种不同类型的位置误差,本文分别提出相应的补偿方法,下面对这两种方法进行分析。
2.1 交流误差补偿
两路霍尔信号幅值不相等且相位非正交可表示为
(8)
us的轨迹为一个椭圆,将其分解成正、负序分量为
(9)

(10)
将us进行反向Park变换可以得到
(11)
其中φ、φ可表示为:
(12)

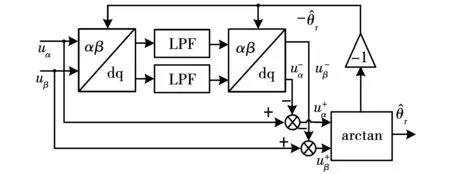
图7 基于坐标变换的误差补偿原理框图Fig.7 Principle diagram of error compensation based on coordinate transformation
(13)
由上式可知,该方法虽然消除了转子位置信号中的二倍频误差,但是会造成解算的转子位置超前于实际转子位置相位φ。
2.2 直流误差补偿
由前述分析可知,根据霍尔信号中的正序分量解算转子位置、低通滤波器以及当霍尔元件α位置与电机A相绕组轴线非重合,均会导致存解算出的转子位置与实际的转子位置存在一定误差,且为直流形式,不随转子位置的改变而改变。针对于直流误差,本文提出一种基于电流环特征量的位置误差自适应补偿方法。

图6 霍尔信号轨迹图Fig.6 Trajectory chart of hall singal

图8 考虑转子位置误差的矢量图Fig.8 Vector diagram with the rotor position error
(14)
其中:rs为定子电阻;Ls为定子电感;E为反电势,可表示为
E=ωeψf。
(15)

(16)
由上式可知,在转速一定的情况下,当不存在转子位置误差时,Δθr=0,特征量δ为最大值。因此,当追踪到最大的误差特征分量时,即实现了位置误差的补偿。
基于电流环误差特征量的补偿角自适应调整流程图如图9所示,其中:dθc为算法的调节步长;Δθc为补偿角;k为算法的执行周期。首先施加一个任意极性的步长dθc,比较前后周期δ的变化,若δ减小,说明施加步长的极性错误,导致位置误差增大,则下一周期改变步长的极性;若δ增大,说明施加步长的极性正确,下一周期的步长极性保持不变。如此根据前后周期δ的变化来调整下一周期调节步长的极性,从而动态调整补偿角度,直至δ收敛至最大值,即实现了转子位置误差的补偿,输出补偿角度可表示为

图9 误差补偿角自适应调整Fig.9 Error compensation angle adaptive adjustment
(17)
由上式可知,位置误差补偿的速度取决于该算法的执行频率fa和调节步长dθc。
基于电流环误差特征量的位置误差补偿示意图如图10所示,假设位置误差Δθr为0.5 rad。从两幅图的对比中可以看出,dθc越大,Δθc接近最优补偿角Δθr越快,即补偿速度越快。由算法的原理可知,当Δθc在Δθr附近时,Δθc将在Δθr上下抖动,dθc越大,抖振越大,dθc的越小,抖振越小,但是补偿速度较慢。fad越大,Δθc接近Δθr越快,即补偿速度越快,但是可能会造成算法执行周期短于电流环响应时间,则前后周期采样的特征量不能够反映dθc所造成电流的变化,会导致步长极性的错误判断;fad过低,则会降低补偿速度。fad和dθc具体数值通常可通过仿真和实验测试得到,本文通过仿真和实验测试,将fad设置为50 Hz,dθc设置为0.03。

图10 位置误差补偿示意图Fig.10 Position error compensation diagram
由上述分析可知,所提出的基于电流环特征量的位置误差自适应补偿方法不仅适用于线性霍尔,当采用其他种类的位置传感器或者无位置传感器算法检测转子位置时,存在直流形式的位置误差,该方法依然适用。
3 仿真与实验验证
为验证上述两种转子位置误差补偿方法的有效性,基于一台高速隐极式永磁同步电机进行仿真和实验验证,其样机主要参数如表1所示。

表1 仿真模型的参数
3.1 仿真验证
在仿真模型中主动设置两路霍尔信号为
(18)


图11 交流位置误差补偿仿真结果Fig.11 Simulated results of AC position error compensation
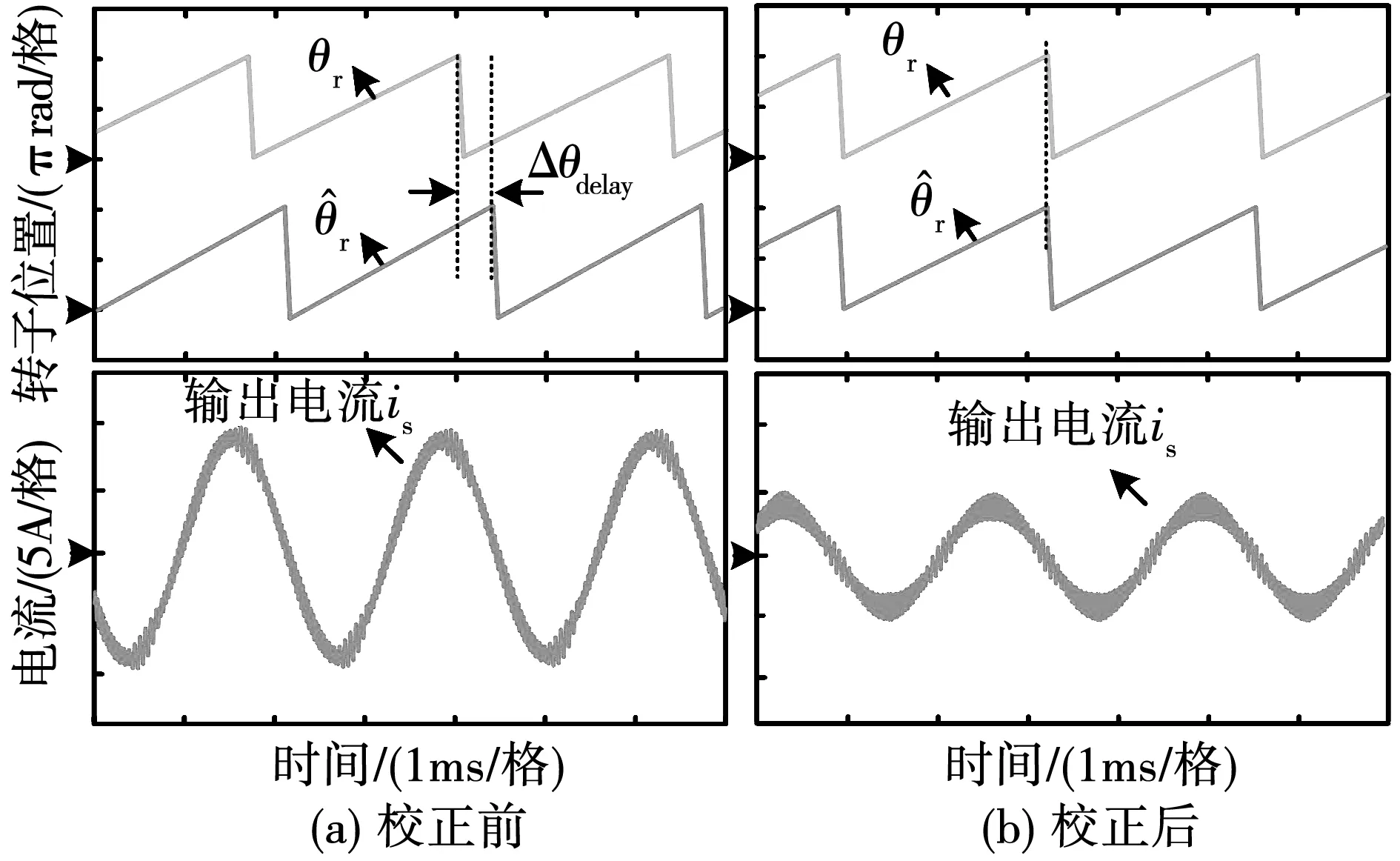
图12 直流误差补偿仿真结果Fig.12 Simulated results of DC position error compensation

图13 直流位置误差补偿方法的动态响应性能Fig.13 Dynamic response performance of DC position error compensation method

图14 转速突变时直流误差补偿仿真结果Fig.14 Simulation results of DC error compensation under speed variation

图15 负载突变时直流误差补偿仿真结果Fig.15 Simulation results of DC error compensation under load variation
3.2 实验验证
本文搭建了基于TMS320F28377D和GaN FET功率器件的高速驱动平台进行实验,相应电机与驱动平台如图16所示,电机带叶轮负载。

图16 高速永磁同步电机与驱动器平台Fig.16 HSPMSM and high-speed drive platform

图17 交流位置误差补偿实验结果Fig.17 Experimental results of AC position error compensation

图18 直流误差补偿实验结果Fig.18 Experimental results of DC position error compensation
图19为算法切入瞬间的动态响应实验结果,可以看出,在0.6 s时间内,随着补偿角度Δθc的增大,输出电流逐渐减小,当补偿角度达到1.1 rad时,会在1.1 rad上下抖动,由于调节步长较小,抖动较小,对系统的稳定性的影响也较小。

图19 直流位置误差补偿方法的动态响应性能Fig.19 Dynamic response performance of DC position error compensation method

图20 变转速时直流误差补偿实验结果Fig.20 Experimental results of DC error compensation under speed variation

图21 变转速时位置补偿角的变化Fig.21 Variation of position compensation angle under speed variation
综上所述,本文通过较为全面的仿真和实验结果对比分析,验证了所提出的转子位置误差补偿方法的有效性。
4 结 论
本文分析了两路霍尔信号幅值不相等、相位非正交、低通滤波器以及安装位置偏差对转子位置检测的影响,将上述非理想因素造成的位置误差分为交流误差和直流误差。针对于交流误差,提出了一种基于坐标变换的位置误差补偿方法;针对于直流误差,提出了一种基于电流环特征量的位置误差自适应补偿方法。方法的优势在于:1)两种补偿方法无需对转子位置误差准确定量,即可实现误差的补偿;2)两种方法实现简单,占用的控制芯片资源较少;3)基于电流环特征量的位置误差自适应补偿方法对其他的位置传感器或者无位置传感器算法具有一定的适用性。本文未考虑霍尔信号中存在直流分量对转子位置检测的影响,需要进一步探究。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
童话王国·文学大师班(2017年6期)2017-07-10
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23
太空探索(2015年6期)2015-07-12
河北科技大学学报(2015年5期)2015-03-11
电测与仪表(2014年2期)2014-04-04
电力自动化设备(2013年11期)2013-09-18
