FAST照明口径分析*
2021-07-15 01:57李建玲柴晓明
天文研究与技术 2021年3期
李建玲,彭 勃,柴晓明
(1. 中国科学院国家天文台,北京 100101; 2. 中国科学院FAST重点实验室,北京 100101; 3. 中国科学院大学,北京 100049)
作为世界上最大的单口径射电望远镜,500 m口径球面射电望远镜由于巨大的反射面,观测灵敏度在所有现有的射电望远镜中居首位。反射面是望远镜的关键组成部分之一,500 m口径球面射电望远镜反射面的基准态是一个半径300 m、直径方向开口口径500 m的巨型球冠[1-2]。整个反射面依地势建造在我国贵州喀斯特洼地中。500 m口径球面射电望远镜主要的技术创新之一是应用主动反射面技术,在观测时,球面反射面内被馈源照明区域的形状通过主动控制变化为300 m口径的抛物面[3],抛物面天线将接收的来自天体的射电波汇聚到抛物面焦点处,再馈送给馈源及接收机进行后续处理。馈源照明区域的抛物面在球冠反射面内部移动,馈源支撑系统承载并驱动馈源在工作空间内运动[4],实现对不同位置天体的观测和对某一固定天体的跟踪观测等。500 m口径球面射电望远镜于2020年1月正式开放运行。主动反射面结构如图1[5]。

图1 500 m口径球面射电望远镜主动反射面结构图Fig.1 The structure diagram of the active reflector of FAST
500 m口径球面射电望远镜主动反射面系统主要由圈梁、索网、反射面单元、下拉索、促动器等组成[6],对反射面起支撑作用的索网主要由主索单元和主索节点组成,反射面单元面板与主索节点连接,铺设在索网上,每个主索节点通过一根下拉索与地面促动器相连,促动器与地锚点相连[7]。促动器是反射面变位的驱动设备,通过控制促动器活塞杆的长度,调节主索节点在索网面上的相对位置,实现索网变位,进而实现索网上反射面位形的变化。主动反射面系统中,索网的主索节点为2 225个,与之相连接的促动器共2 225台。500 m口径球面射电望远镜主动反射面系统主要部件和设备如图2。
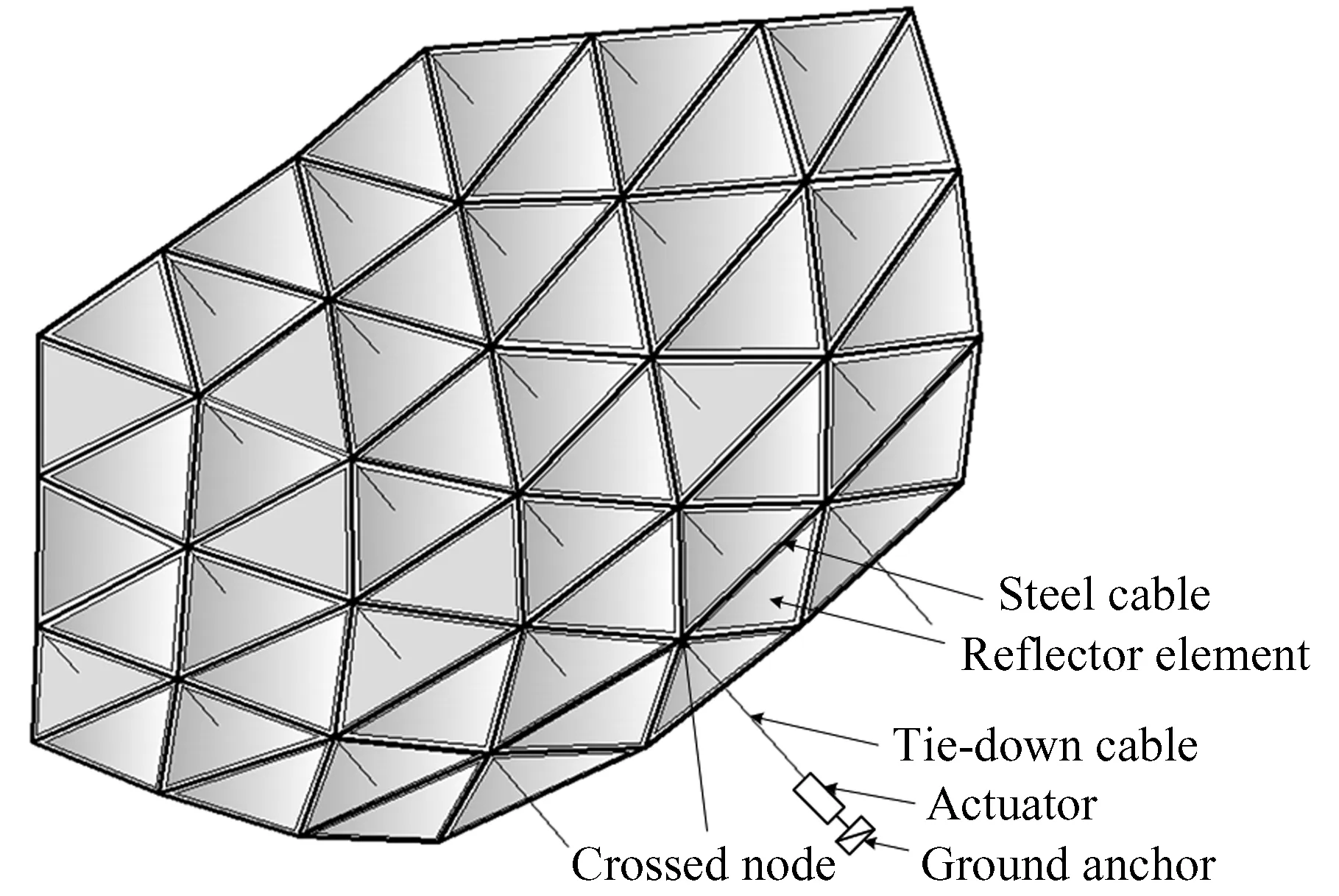
图2 500 m口径球面射电望远镜主动反射面系统主要部件和设备示意
对于500 m口径球面射电望远镜反射面而言,观测过程中,馈源照明区域内的反射面离开球面位置形成抛物面,由于照明区域是移动的,不同位置反射面的形状在球面和抛物面之间变换。抛物面天线的口径对进一步提高望远镜的观测性能起决定作用,因此,面向500 m口径球面射电望远镜后续发展、观测性能拓展及提升,在现有驱动设备(促动器)的运行状态下,探索增大口径抛物面的变位具有重要意义。
1 基准球面到抛物面的距离分析
500 m口径球面射电望远镜反射面的形状在球面和抛物面之间变换,基准球面到抛物面的距离分析是进行望远镜反射面变位的基础。望远镜变位抛物面与基准球面示意图如图3。

图3 变位抛物面与基准球面示意图Fig.3 Paraboloid and spherical surface
由于球面与抛物面的对称性,变位形成的抛物面在球面内部移动,处于球面内不同区域的抛物面与球面的相对关系保持不变。图3中,实线表示基准球面,虚线表示由球面变位形成的抛物面。由于抛物面与球面的旋转对称性,变位中抛物面与球面的相关计算可在一维的情况下进行。以球心为坐标原点,球面与抛物面的方程一般可表示为[8]
(1)
如图3,500 m口径球面射电望远镜球面反射面基准态为球面半径R=300 m、球面开口口径D′=500 m。从球面变位得到的抛物面口径D=300 m,即望远镜的有效照明口径为300 m。另外,望远镜有效照明区域是抛物面形状,观测天体发出的平行于抛物面轴线的射电波汇聚于抛物面焦点处形成完整的点像,即是一个主焦系统,可计算得出抛物面的焦距及焦径比,焦径比F表示为[9]
(2)
其中,f为焦点离抛物面反射面的焦距;D为抛物面的口径。在300 m口径抛物面范围内,计算不同焦距对应抛物面偏离基准球面的情况如图4。
图4中,横坐标表示300 m口径抛物面的范围,在136.56~142.13之间(包含这两个值),选取7个不同焦距,纵坐标表示这7个焦距对应抛物面与基准球面的偏离情况。
500 m口径球面射电望远镜馈源照明区域的反射面偏离球面形成抛物面,偏离球面意味着小于球面位置或大于球面位置。由图4可以得出,每个不同焦距的抛物面存在一个偏离基准球面的最大值,这实际上反映了反射面从基准球面到抛物面的最大变位行程。在望远镜变位系统中,促动器的最大行程约为 ±0.6 m[5,10]。对照图3,以基准球面所在的位置为初始位置,接近球面球心方向(小于基准球面)及离开球面球心方向(大于基准球面)的最大行程都约为0.6 m。如图4,得出小于基准球面或大于基准球面的偏离距离值,已减去球面的初始值。如果以离开基准球面球心的方向为正值,则这一方向的最大行程约为 +0.6 m,而接近球心方向的最大行程约为 -0.6 m。图4分别给出了抛物面与球面最大偏离约为 ±1.0 m,±0.8 m,±0.6 m及在两个方向上最大偏离基本相同时对应抛物面的偏离情况。
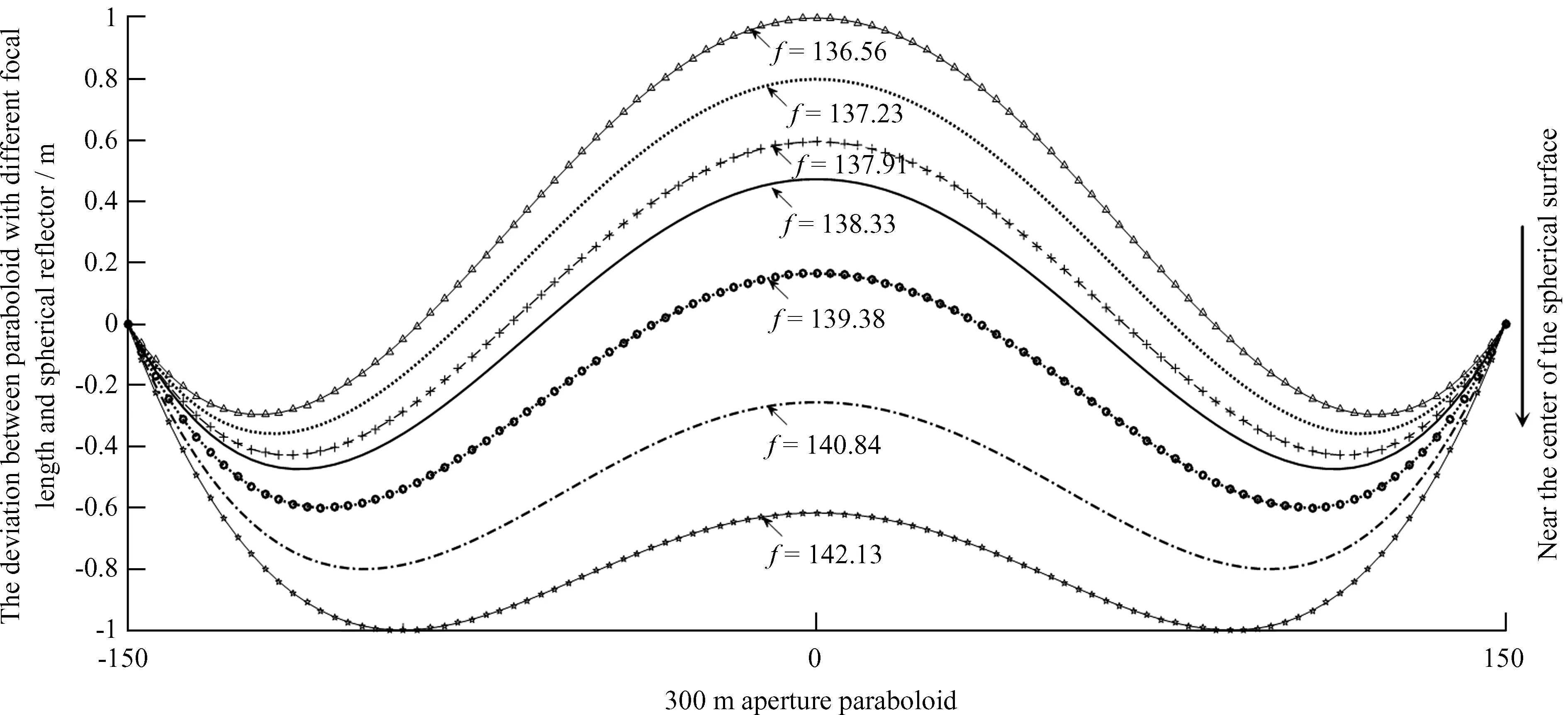
图4 300 m口径抛物面时不同焦距抛物面与基准球面的偏离情况Fig.4 The deviation between paraboloid and spherical reflector
对于口径300 m的抛物面,在抛物面焦距为138.33 m时,抛物面在两个方向上偏离基准球面的最大行程基本相同(如图4)。在一定精度下计算,当抛物面焦距大于138.33 m时,接近基准球面球心方向的行程较大,而抛物面焦距小于此值时,离开基准球面球心方向的行程较大。从图4可以得出,抛物面口径一定时,随着抛物面焦距减小,抛物面的整体位形向着离开基准球面球心的方向移动。当抛物面的口径一定时,存在一个抛物面焦距,对应抛物面在接近球心方向上偏离球面的最大行程约为0.6 m;同时存在另一个焦距,对应抛物面在离开球心方向上偏离球面的最大行程也约为0.6 m。在这两个焦距之间,对应抛物面与球面的偏离距离在 ±0.6 m内。
我们可通过计算得出在500 m口径球面射电望远镜驱动促动器最大行程范围内变位抛物面的焦距及焦径比。计算抛物面口径为300 m时,现有促动器最大行程范围内,两焦距对应抛物面与基准球面的偏离如图4。通过以上分析,抛物面的焦距在一定范围内时,抛物面偏离球面的距离也在一定范围内,也就是从球面到抛物面的变位行程在一定范围内。
由图4可以看出,焦距f=137.91 m,较小焦距对应抛物面在离开球面球心方向最大偏离约为0.6 m;焦距f=139.38 m,较大焦距对应抛物面在接近球面球心方向最大偏离也约为0.6 m。故处于两焦距之间抛物面偏离球面的距离在 ±0.6 m内。进而由图4可以求出在两焦距之间,对应抛物面偏离基准球面的最大距离,如图5。图5中横坐标表示根据图4计算的两焦距范围,纵坐标表示焦距对应抛物面与球面偏离最大距离。为了表示距离的限制,图中抛物面接近基准球面球心方向和离开基准球面球心方向的距离都表示为正向。由图5可以得出,随着抛物面焦距增加,偏差最大距离减小到一定值后再增加。对照图4中两焦距,焦距为小值时,抛物面在离开球面球心方向上的最大距离占主导;随着焦距的增加,在离开球面球心方向上的最大距离逐渐减小,直到两个方向上的最大距离基本相同;焦距继续增加,换作抛物面在接近球面球心方向上的最大距离占主导,且随着焦距进一步增加,接近球面球心方向上的最大距离也逐步增加,直到限制值,符合图4中抛物面焦距增加引起两者偏离最大距离的变化过程。
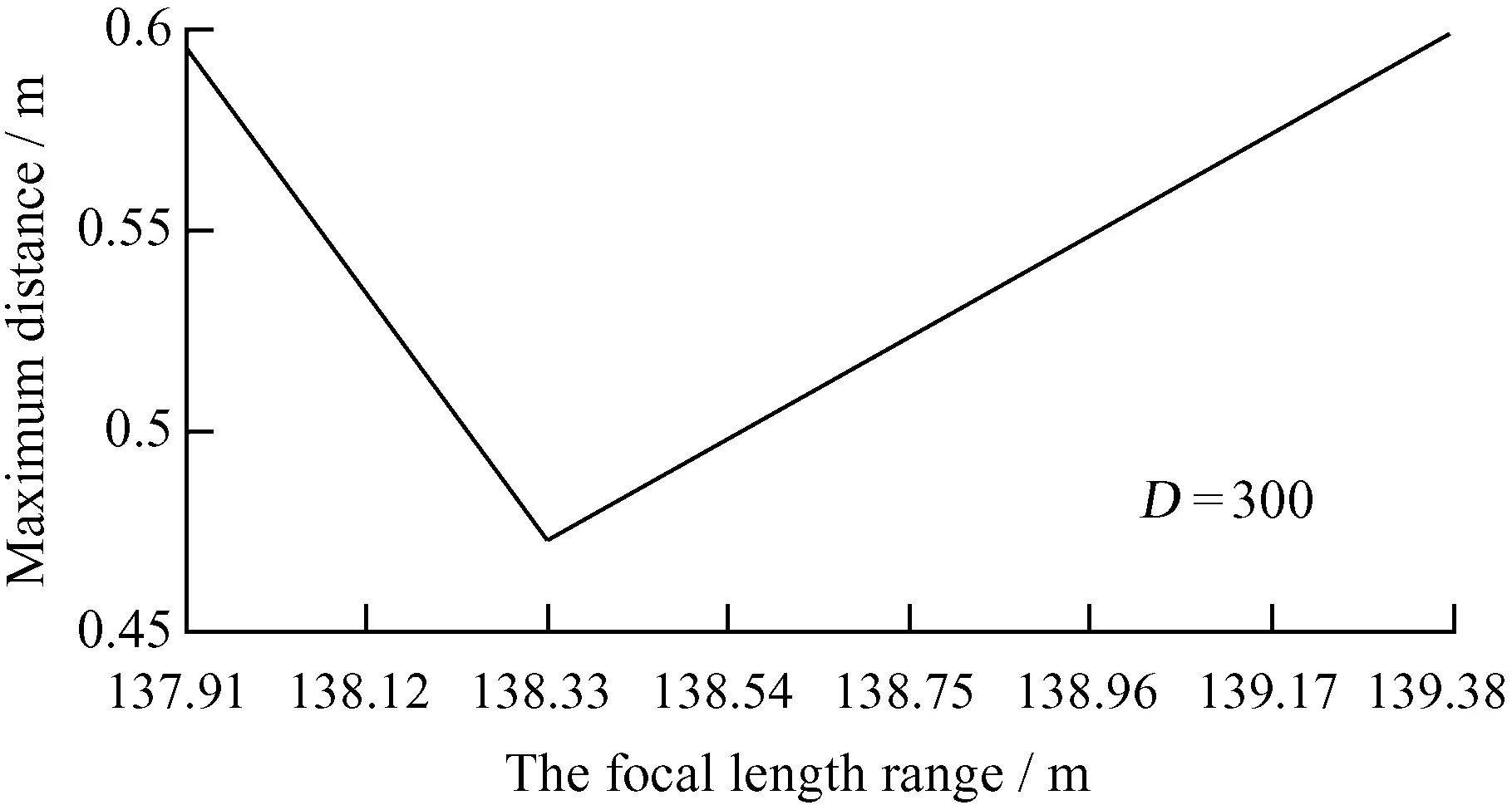
图5 300 m口径抛物面促动器行程内抛物面与球面偏离最大距离
2 大于300 m口径抛物面的分析
对大于300 m口径的抛物面,本文选取305 m和310 m进行计算分析。对于305 m口径抛物面,500 m口径球面射电望远镜现有促动器最大行程范围内,两焦距对应抛物面与基准球面的偏离如图6(a),可以求出在这两焦距之间,对应抛物面偏离基准球面的最大距离,如图6(b)。

图6(a) 305 m口径抛物面促动器行程内抛物面与球面偏离距离;(b) 305 m口径抛物面促动器行程内抛物面与球面偏离最大距离
图6(a)横坐标表示305 m口径抛物面的范围,纵坐标表示不同焦距对应抛物面与球面的偏离距离。图中实线和虚线分别表示焦距f=137.62 m和f=138.64 m对应抛物面与球面的偏离。图6(b)表示在两焦距之间,随着焦距增加,抛物面与球面偏离的最大距离呈现从离开球心到接近球心的变化。
对于310 m口径抛物面,500 m口径球面射电望远镜现有促动器最大行程范围内,两焦距对应抛物面与基准球面的偏离如图7(a)。同样可求出在这两焦距之间,对应抛物面偏离基准球面的最大距离,如图7(b)。
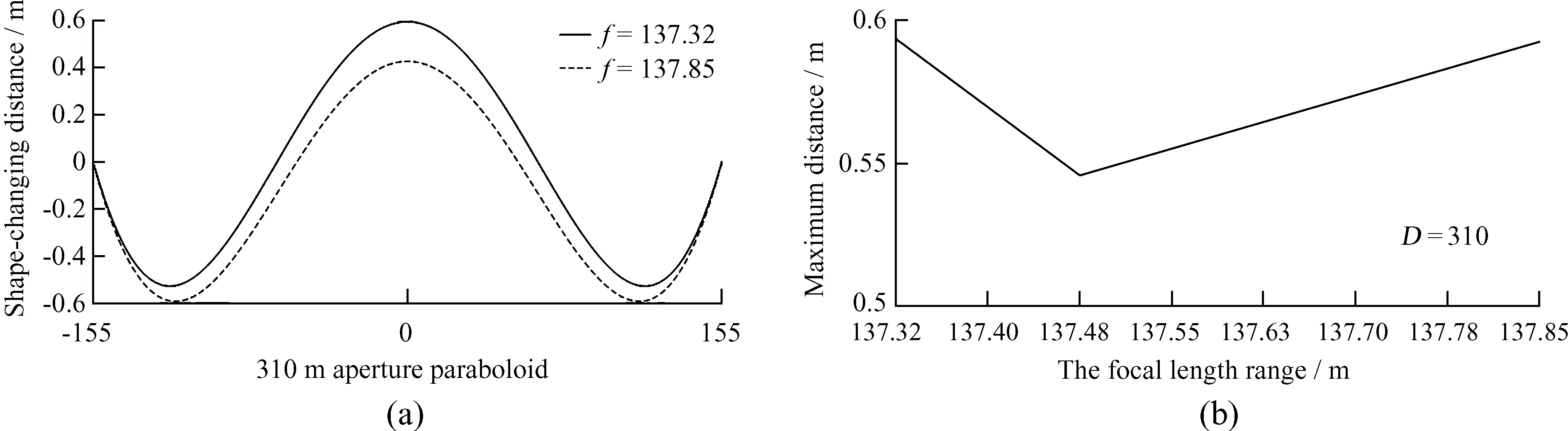
图7(a) 310 m口径抛物面促动器行程内抛物面与球面偏离距离;(b) 310 m口径抛物面促动器行程内抛物面与球面偏离最大距离
图7(a)中实线和虚线分别表示焦距f=137.32 m和焦距f=137.85 m对应抛物面与球面的偏离。图7(b)表示在两焦距之间,随着焦距增加,抛物面与球面偏离最大距离的变化规律同样是先减小再增加。
3 讨 论
通过以上计算与分析,从驱动促动器运动行程考虑,增大照明口径到310 m理论可行,且对应的焦距与焦径比可以在一定范围内选取。另外,照明口径增大时,望远镜馈源定位与馈源照明等需要与抛物面相应匹配。500 m口径球面射电望远镜馈源支撑系统的6索驱动机构及AB轴机构等可实现馈源的控制定位。与300 m口径相比,照明口径在310 m左右时,馈源运动位置、馈源照明变化都较小,与馈源系统相关的部件设备易于实现相应匹配。望远镜反射面变位时,目前促动器最大速度约为1.6 mm/s[6]。如果变位调整量为0.6 m,在此速度下,变位所需时长约7 min左右。
总结上述计算数据,表1列出了500 m口径球面射电望远镜反射面变位中,分别对于300 m,305 m及310 m口径抛物面,在现有驱动促动器最大行程范围内的抛物面焦距及焦径比的近似取值。

表1 促动器行程范围内不同口径抛物面对应主要参数取值Table 1 The main parameter of paraboloid of different apertures in the travel distance of the actuator
4 结 语
抛物面口径及基准球面尺寸为定值时,基于文中的抛物面与球面的基本关系,通过计算抛物面偏离球面情况得出,随着焦距减小,抛物面整体位形向着离开基准球面球心的方向移动。在500 m口径球面射电望远镜驱动促动器最大行程范围限制下,进行从球面到不同口径抛物面的变位,大口径抛物面对应可选取的焦距范围较小,而小口径抛物面对应可选取的焦距范围较大。从望远镜驱动促动器运动行程的方面考虑,本文给出了305 m和310 m口径抛物面焦距与焦径比的取值,还需考虑对望远镜索网及下拉索等的具体影响。本文抛物面与基准球面的相关分析同样适用于其他口径抛物面的情况。
猜你喜欢
空间电子技术(2022年3期)2022-08-09
中学生数理化(高中版.高考数学)(2022年2期)2022-04-26
航天器环境工程(2021年2期)2021-05-12
航天制造技术(2020年5期)2020-11-10
科技视界(2020年19期)2020-07-30
中学生数理化(高中版.高二数学)(2018年1期)2018-02-26
科技资讯(2017年29期)2017-12-12
现代交际(2017年19期)2017-10-23
科技创新与应用(2017年28期)2017-09-22
中学数学杂志(高中版)(2017年4期)2017-07-27