超高速磁浮列车运行控制技术展望
2021-07-15 06:48陈玉泉
电气化铁道 2021年3期
陈玉泉
0 引言
目前,我国高铁建设已经取得巨大成就,中低速磁浮交通已实现产业化,高速磁浮正在积极推进中,磁浮交通已经成为我国未来轨道交通的发展方向之一。我国于2018年正式启动超高速磁浮技术发展研究项目,开始探索1 000 km/h以上速度范围的超高速磁浮交通技术发展路线。本文结合我国超高速磁浮技术发展研究课题,对最高运行速度1 000~1 200 km/h的超高速磁浮列车运行控制关键技术进行分析和展望。
1 超高速磁浮交通的特点
课题组通过一系列调查和研究,将高温超导真空管道方案作为超高速磁浮交通技术发展方向,该方案主要具有以下特点:
(1)超高速磁浮悬浮与导向采用超导永磁钉扎斥力悬浮技术,也可采用闭合线圈电动斥力悬浮技术。列车在运行过程中悬浮于轨道上方,与轨道不产生任何接触。
(2)超高速磁浮驱动方式可采用空芯长定子单边或双边永磁或超导同步直线电机、铁心长定子单边双边异步直线电机驱动。
(3)超高速磁浮采用高温超导真空管道,列车在真空管道中运行。
(4)超高速磁浮列车最高运行速度可达1 000~1 200 km/h。
(5)超高速磁浮列车没有动力,由地面牵引驱动系统推动列车运行;每个供电分区只能运行一列车。
2 超高速磁浮列车运行控制的需求和构想
2.1 超高速磁浮列车运行控制需求
(1)应遵循故障-安全原则。
(2)应满足最高运行速度1 000~1 200 km/h的需求。
(3)自动化等级(GOA)不宜低于GOA3级。
(4)应满足在真空管道内运行的需求。
(5)应按供电分区设置分区控制系统,并实现相邻分区控制自动无缝切换。
(6)应通过与牵引和悬浮控制系统接口实现列车牵引和制动控制。
(7)应具备可靠的测速定位手段,基于准确的测速定位监控列车安全运行。
(8)应具备冒进防护功能。
(9)应具备进站、出站、折返联锁控制功能。
(10)应保证相邻列车间足够的安全追踪间隔。
(11)应具备精确停车功能,并实现车门与站台门精确对位,保证乘客上下车的安全和舒适。
(12)应具备车-地双线通信功能。
(13)应具备对列车状态的实时监测功能。
2.2 列车运行控制系统构想
超高速磁浮列车运行控制与传统轮轨列车运行控制系统有所不同,主要体现在:(1)列车无动力,牵引和制动均由地面系统完成;(2)列车运行速度为超高速,对车-地通信的传输速率和可靠性要求较高;(3)超高速列车的加速和制动距离较长,适合超长的站间距和追踪间隔;(4)超高速条件下,列车控制应具备更高的安全性、可靠性和自动化程度;(5)列车在真空管道内运行,列车控制系统应考虑轨旁设备的安装条件以及与管道隔离系统的联动控制。
基于超高速磁浮的特点,提出以下由传统列车运行控制系统向列车自主运行控制方向发展的不同思路:将列车运行控制系统的重心放在地面设备上,全面提高地面系统的安全性和可靠性,车载系统主要完成列车完整性检查和状态监控,并精简车载系统与地面系统的信息传输。主要理由有:
(1)列车的牵引和制动均由地面系统完成,虽然可以通过车-地通信的方式实现由车载系统向地面系统输出控制指令实现列车自主运行控制,但是,超高速运行列车的车-地通信信息量增大,对无线通信的可靠性和安全性要求更高,暂时尚无可靠的手段予以保证;尽管未来通信技术发展能够实现这一目标,但精简车-地通信信息量能更好地完成车-地信息传输。
(2)实现列车自主运行控制其中的一个目的是为了减少地面信号设备尤其是轨旁设备,而超高速磁浮列车是以供电分区作为闭塞分区,且运行时与地面系统未发生物理接触,以地面系统为控制重心并不代表需要大量增加地面设备,而只是将控制的核心功能由地面设备来完成。
(3)列车悬浮控制、牵引控制和制动控制也是列车运行控制的关键,需要对上述控制系统的状态进行监测,并将相关信息传送至列车运行控制系统核心设备。若控制核心在列车上,车-地双向通信数据量将较传统方式大大增加,对车-地通信的带宽、速率、时延、误码率的要求也会提高,并进一步加大车-地通信功能实现的难度。
超高速磁浮列车运行控制系统可分为中心控制系统、分区控制系统和车载控制系统三部分,如图1所示。
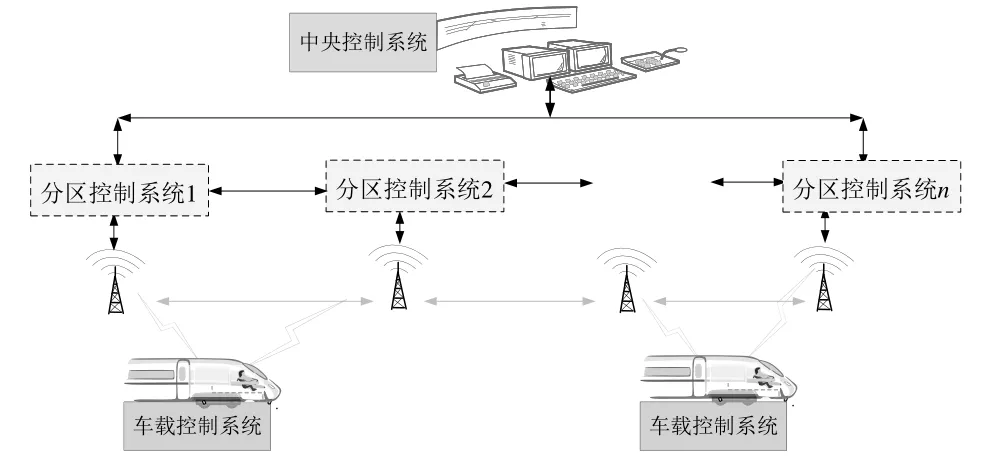
图1 超高速磁浮列车运行控制系统架构
中央控制系统位于运营控制中心,负责全线超高速磁浮列车自动或人工的运行控制、调度管理与监控。与传统方式的不同点在于超高速磁浮中央控制系统是一个安全系统,安全等级与分区控制系统、车载控制系统一致,均应采用高可靠、高速运算的计算机平台,并满足SIL4级要求。
根据供电分区的设置情况,分区控制系统通过有线骨干网与中央控制系统和相邻的分区控制系统联网,接收并执行来自中央控制系统的命令,实现对道岔和牵引制动系统等轨旁执行设备的控制、对本分区内列车进行控制和管理、向中央控制系统和相邻分区控制系统报告本分区管内设备状态等。
超高速磁浮列车两端均设置一套车载控制系统设备,每套车载控制系统设备均能单独与车-地通信系统联系,形成相对独立的双套热备系统。车载控制系统负责磁浮列车状态的信息获取和控制,向地面分区控制系统报告列车状态信息,并与分区控制系统配合,共同控制列车安全运行。
3 超高速磁浮列车运行控制关键技术分析和展望
3.1 测速定位技术
列车测速定位技术是列车运行控制的关键技术之一,列车测速定位的精度和可靠性对列车安全防护至关重要,其将影响列车的运行追踪间隔和运营效率。
传统轮轨列车典型的测速定位方式是采用车轮测速传感器测速,并通过绝对定位技术对其进行校正。在磁浮交通系统中,由于磁浮列车与轨道完全无接触,不需要设置车轮,因而无法采用车轮测速手段。超高速磁浮列车定位测速应根据磁浮特点和速度等级选择可行的测速定位技术甚至研究新型的测速定位技术。
3.1.1 已应用并可适应磁浮列车的测速定位技术
目前已应用并可适应磁浮列车的主要测速定位技术有:
(1)基于感应环线的测速定位技术。基于感应环线的测速定位目前在日本名古屋和山梨试验线应用,通过在轨道上铺设感应环线,并在车底安装感应线圈,利用地面感应环线和车上感应线圈之间的电磁感应原理计算列车的相对位移,从而实现列车测速和定位。基于感应环线的测速定位方法可通过冗余设置感应线圈提高可靠性和抗干扰能力,但是轨旁设备较多,并且在道岔区域还需进行特殊处理,工程造价和维护工作量均较高。最关键的问题是基于感应环线的测速定位方法能否支持1 000 km/h以上的超高速运行仍存在不确定性。
(2)基于长定子齿槽检测的测速定位技术。上海磁悬浮示范线应用了基于长定子齿槽检测的测速和相对定位方法,并采用固定应答器的绝对定位方法进行校正。该方案基于列车采用长定子直线同步电机作为牵引驱动,列车上设置有固定频率的激励信号源和谐振电路驱动的感应线圈,当感应线圈在齿槽上方移动时,由于齿槽结构变化会导致磁路发生变化,通过检测线圈自身的等效电感的周期性变化可计算列车单位时间内位移,从而实现列车的测速定位。基于长定子齿槽检测的测速定位方法具有分辨力高、可靠性高、抗干扰能力强、造价相对较低等优点;但是只能应用于采用长定子直线电机驱动的磁浮系统,且能否支持1 000 km/h以上超高速运行同样存在不确定性。
(3)基于计数轨枕的测速定位技术。长沙磁浮快线和北京S1线中低速磁浮系统采用基于计数轨枕的测速定位方案。该方案在车底设置具有固定间距的电涡流接近开关传感器,对轨道的金属轨枕进行检测。当列车以一定的速度行驶时,轨枕触发接近开关传感器形成一系列脉冲,通过测定脉冲频率即可计算出列车速度和相对位移。该方法具有装置简单、造价低、维护简单、抗干扰能力强等优点,但对线路上轨枕安装间距的精度有较高要求。
(4)基于多普勒雷达的测速定位技术。通过在车底安装多普勒雷达,向轨道的金属轨枕发射电磁波,由于列车与轨枕存在相对运动,根据多普勒频移效应,通过检测发射波和反射波之间的频移就可以计算列车的运行速度。该技术方案不需要安装轨旁设备,造价低,维护简单,且由于超高速磁浮在真空管道内运行,不易受外部条件影响导致误差。但该方案对线路上轨枕或轨旁固定设施安装间距的精度同样有较高要求,可以进一步研究轨旁具有高安装精度的设施作为参照物。
(5)基于全球导航卫星系统测速定位技术。基于全球导航卫星系统(Global Navigation Satellite System,GNSS)的定位方法是一种成熟的技术,目前已广泛应用于航空航天、铁路、公路等领域。随着北斗卫星导航系统的建设,我国可以在各领域充分利用纯自主的卫星导航系统。北斗卫星导航系统在定位精度上目前可达到2.5 m,且通过设置差分基站可以精确至厘米级;对于超高速的适应性方面也具有明显优势;唯一受限的是隧道内的信号覆盖问题。
(6)SAR-INS组合测速定位技术。由于超高速磁浮时速大于1 000 km,因此也可以从速度等级角度考虑借鉴飞机的测速定位技术。飞机采用SAR-INS组合测速定位技术。合成孔径雷达(SAR)为主动式微波成像传感器,可在能见度极低的气象条件下得到高分辨率雷达图像、高精度的观测距离信息和多普勒信息。惯性导航系统(INS)采用陀螺仪和3个互相垂直的加速度计测量速度和位置变化,由于不需要发送和接收信号,自主性和抗干扰能力都非常强。通过SAR技术和INS技术结合,优势互补,既能提高测速定位的精确度,又能增强抗干扰能力。
3.1.2 引用新技术应用于超高速磁浮测速定位
(1)RFID射频识别技术实现测速定位。通过在轨旁固定间距处设置RFID射频电子标签,列车通过时扫描RFID射频电子标签获取绝对位置信息实现绝对定位,还可以根据列车通过固定间距的时间计算列车速度。为提高测速定位系统的可靠性,可在磁浮轨道两侧冗余设置固定间距的RFID射频电子标签,在车载装置列车上设置2套电子标签探测器,如图2所示。该技术的缺点是不能实时测速定位,更适合于绝对定位。

图2 RFID射频识别技术测速定位示意图
(2)采用激光扫描技术实现列车定位。激光扫描技术可以快速、大量地采集空间点位信息,具有快速、无接触、实时、动态、主动、高密度、高精度、数字化、自动化等特性。扫描速度由最初1 000点/秒发展到目前的120万点/秒。因此,可通过在列车上设置激光扫描设备,地面设置便于激光扫描设备辨认且不易误认的设施,按固定间距设置,可实现绝对定位或根据列车通过固定间距的时间计算列车速度,如图3所示。在地面设置激光扫描设备对列车进行辨认在技术上可行,但是需要设置大量激光扫描仪,工程造价较高,因此只考虑在列车上设置激光扫描仪。
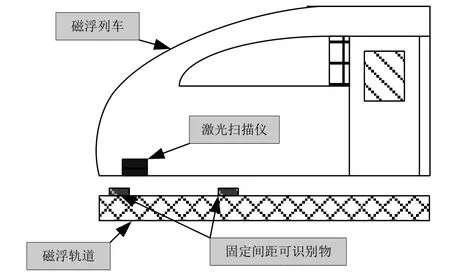
图3 激光扫描技术测速定位示意图
为提高测速定位系统的可靠性,可在列车上设置2套激光扫描仪,通过冗余结构实时进行比对,保证测速定位的准确性。如果磁浮轨道设施的尺寸是固定的,也可以直接采用磁浮轨道设施作为识别物,以避免在轨道上安装其他设施,且更容易实现连续的测速定位功能。
通过对上述测速定位技术的分析和展望,并考虑真空管道和国内长距离运输桥隧比较高的应用环境,在上述多种测速定位技术中,目前已在中低速和高速磁浮系统应用的技术对超高速磁浮系统的适应性上还有所欠缺,新技术如RFID射频识别技术和激光扫描技术目前尚未在轨道交通领域得到应用,仍待进一步的研究和实验室试验。SARINS组合测速定位技术已有多年的应用经验,技术相对较为成熟,缺点在于测速定位精度不足,需要加以绝对定位校正。基于全球卫星导航系统测速定位技术具有很好的运用前景,但存在隧道内信号覆盖问题。
在不具备成熟的超高速磁浮测速定位技术前提下,对不同测速定位方法进行结合,使之优势互补,显著提高测速定位的精度和可靠性,将是未来重要的研究方向。例如,在非隧道和地上区段采用卫星定位技术结合SAR-INS组合测速定位技术,在隧道和地下区段采用SAR-INS组合测速定位技术并结合RFID射频识别技术实现绝对定位校正。
3.2 车-地通信技术
超高速磁浮列车运行控制系统的车-地信息通道涉及行车安全,应满足超高速运行、高可靠性、低延时、低误码率等要求。
超高速磁浮车-地通信技术面临的最大问题是超高速带来的多普勒频移问题和频繁越区切换问题。目前在轨道交通领域应用成熟的车-地无线通信系统支持的最高速度约为400 km/h,需要根据超高速磁浮运行控制的特定需求及真空管道的材料及结构特点,重点研究对多普勒频移不敏感的新型调制解调技术和新的越区切换算法,以适应列车超高速移动时无线通信系统能够稳定可靠工作。
虽然目前还没有成熟可靠的车-地通信技术能够满足超高速磁浮运行控制的需求,但随着无线通信技术的飞速发展,5G技术已经开始商用,其未来发展可期。当前,部分研究人员也提出采用C-RAN和免切换移动蜂窝技术来满足超高速磁浮的运行控制需求。
超高速磁浮车-地通信技术的前景是乐观的,由于超高速磁浮列车运行速度极快,对信息的实时性和误码率要求很高,为了增强系统可靠性,可以通过优化列车运行控制系统的架构和功能,简化车-地通信的信息量,从而提高信息传输的可靠性。
3.3 其他配套关键技术
列车悬浮、牵引和制动技术在超高速磁浮列车运行控制中同样起着至关重要的作用。列车运行控制系统不仅需要通过与列车悬浮、牵引和制动控制系统接口实现联动和控制,列车悬浮、牵引和制动技术还需要具有与超高速磁浮列车运行控制系统相当的可靠性、可用性和安全性,才能保证超高速磁浮列车安全、可靠运行。
4 结语
最高运行速度1 000~1 200 km/h的超高速磁浮系统目前仍处于战略研究阶段,部分研究机构已经逐步开展系统设备的研制,并取得了一些成果,但是,超高速磁浮列车运行控制关键技术目前仍缺乏成熟、可靠的技术作为支撑。本文仅对超高速磁浮列车运行控制关键技术做出一些展望,未来还有待广大科研机构共同努力研究,逐步攻克目前存在的瓶颈问题,实现超高速磁浮列车运行控制关键技术的突破。
猜你喜欢
环球时报(2022-03-29)2022-03-29
铁道通信信号(2020年1期)2020-09-21
金桥(2018年1期)2018-09-28
四川冶金(2018年1期)2018-09-25
知识经济·中国直销(2018年7期)2018-07-27
北京航空航天大学学报(2016年8期)2016-11-16
铁道通信信号(2016年8期)2016-06-01
中国铁道科学(2015年6期)2015-06-21
电测与仪表(2015年8期)2015-04-09
电测与仪表(2015年7期)2015-04-09