
RSINS/里程计容错组合导航方案设计与性能验证
2021-08-05 09:29杨洁申亮亮王新龙蔡远文陈鼎
航空兵器 2021年2期
杨洁 申亮亮 王新龙 蔡远文 陈鼎
摘要:为满足武器发射车辆对车载导航系统自主性、精确性和可靠性的要求,设计了一种RSINS/里程计容错组合导航方案。首先,在对里程计不同量测信息特点分析的基础上,建立了基于里程增量匹配方式的RSINS/里程计组合导航系统模型。其次,根据对RSINS/里程计组合导航系统模型的可观测性分析结果,建立了一种可观的RSINS/里程计组合导航系统模型,并针对车辆行驶过程中里程计可能发生的量测信息不可用问题,设计了一种基于序贯卡尔曼滤波的RSINS/里程计容错组合导航信息融合方案。最后,通过仿真验证表明,RSINS/里程计容错组合导航方案能够保证组合系统的导航精度和可靠性。
关键词: 捷联惯导系统;旋转调制;里程计;组合导航;序贯卡尔曼滤波
中图分类号: TJ765; V249 文献标识码: A 文章编号: 1673-5048(2021)02-0093-07
0 引 言
武器发射车辆对车载导航系统的自主性、可靠性和精确性提出了较高要求[1]。惯性导航系统能够独立自主地提供姿态、速度和位置等导航信息,具有数据更新率高、隐蔽性好、稳定性高等优点。因此,武器发射车辆大都配有惯性导航系统。然而,惯性导航系统的导航误差受惯性器件误差的影响随时间累积,所以通常利用其他导航系统来辅助惯性导航系统,并组成组合导航系统,进一步提高武器发射车辆的导航精度[2]。
从导航精确性来看,车载组合导航系统大致经过两个发展阶段。第一代车载组合导航系统出现在20世纪70年代,主要采用惯性导航系统和地图匹配相结合的导航方式,通过地图匹配技术对惯性导航系统的定位误差进行定期修正,其中以美国Etak公司的Navigator为典型代表[3],但受限于地图精度的影响,并没有完全达到很好的效果。第二代车载组合导航系统出现在20世纪90年代,主要采用捷联惯导系统(SINS)和全球导航卫星系统(GNSS)或者里程计相结合的导航方式。由于GNSS可以直接为载体提供对地位置和速度信息,所以SINS/GNSS组合导航系统在定位精度上有了突破性提高,其中以美国的侠士定位定向系统为典型代表[3],其定位精度可以达到10 m。但GNSS信号易受干扰和欺骗,因而无法满足武器发射车辆对车载导航系统的自主性要求,而里程计可以为车辆提供误差不随时间累积的载体系下的速度信息,自主性强、成本低[4],所以SINS/里程计组合导航系统是一种完全自主,具有高隐蔽性和强抗干扰能力的组合方式[5-7]。但由于里程计无法输出载体的位置和姿态信息,所以SINS/里程计组合导航系统在长航时导航应用中的定位误差仍然会受惯性器件误差和初始对准误差等因素影响,随时间逐渐发散。
近年来,旋转式捷联惯导系统(rotary strapdown inertial navigation system,RSINS)采用旋转调制技术在现有惯性器件技术条件下为提高导航精度提供了一条有效途径[8-9]。采用旋转调制技术可在导航系中将惯性器件误差调制成周期性变化的信号,从而抵消器件误差对导航精度的影响,提高惯导系统长航时导航精度,提高系统的初始对准精度[9]。因此,RSINS/里程计组合导航系统能在保证自主性的前提下进一步提高导航精确性,是一种适用于武器发射车辆的长航时高精度自主导航方案。
基于此,并考虑到车辆行驶过程中可能出现的打滑、滑行、侧滑和跳跃等情况[10-11],本文设计了一种基于序
贯卡尔曼滤波的RSINS/里程计组合导航信息融合方案,并对该方案的可行性进行了验证。
1 RSINS/里程计组合导航系统量测匹配方式选择
定义常用坐标系:选择东-北-天地理坐标系为导航坐标系(n系);与载体固联,沿载体右-前-上方向的坐标系为载体坐标系(b系);与惯性器件固联,沿惯性器件敏感轴方向的坐标系为惯性器件坐标系(s系)。
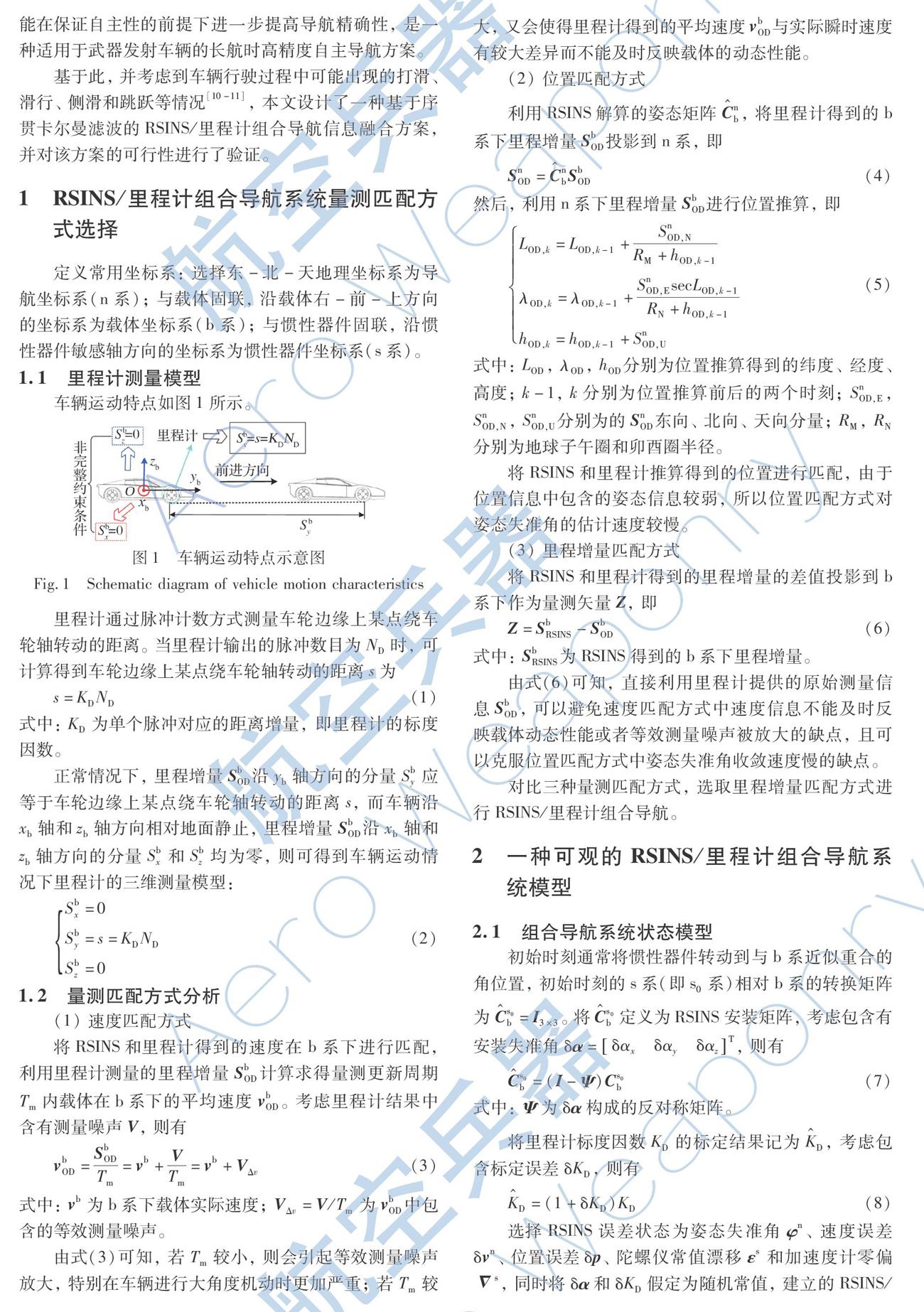
1.1 里程计测量模型
车辆运动特点如图1所示。
4 仿真验证
4.1 仿真条件
对所提方案的长时间导航性能及故障发生时的容错性能进行仿真验证。
(1) 车辆运动轨迹设定
车辆运动轨迹包含匀速、加减速、转弯、爬坡和下坡等机动方式,行驶总时长1 h,最大速率20 m/s,行驶总距离58.15 km。初始位置(L0=40°N,λ0=116°E,h0=100 m),初始速度和初始姿态角均为零。
(2) 传感器及滤波参数设定
传感器参数:惯性器件和里程计的采样频率均为100 Hz。陀螺仪常值漂移为0.02 (°)/h,测量噪声标准差为0.002 (°)/h;加速度计零偏为100μg,测量噪声标准差为10μg;里程计标度因数误差为1%;里程计提供的里程增量测量噪声标准差为0.01 m (0.1 s)。
RISNS选用单轴连续旋转方案,旋转轴向为z轴,旋转角速度为6 (°)/s。安装失准角为(δαx=18′,δαy=25′,δαz=12′),初始对准误差为(φnE=30″,φnN=30″,φnU=10′)。
卡尔曼滤波器参数:状态更新周期0.01 s,量测更新周期0.1 s。滤波稳定后将φn和δvn对RSINS进行反馈校正,校正周期0.2 s,校正系数0.1。
(3) 故障模拟
对打滑、滑行、侧滑和跳跃这四种情况进行模擬,各故障的发生时段及发生位置分别如表1和图3所示。
跳跃时,高度方向的速度设置为vbz=0.5sin[(t-t1)·π/15];打滑时,里程计输出设置为理想输出的1.1倍;侧滑时,横向速度设置为vbx=sin[(t-t3)π/5];滑行时,里程计输出设置为零。t1和t3分别为相应故障发生的起始时刻。
故障检测阈值选择:虚警概率为α=10-3,查表得到自由度为1的χ2分布对应于α的临界值为TD=10.83。
4.2 仿真结果及分析
(1) 不同方案的导航精度对比
不考虑车辆行驶过程中打滑、滑行、侧滑或跳跃等状况,对不同方案的导航精度进行对比。从图4~5可以看出,由于受惯性器件误差影响,SINS解算得到的姿态和位置误差是随时间累积的;而引入旋转调制后,垂直于旋转轴向的惯性器件常值误差得到抑制,使得RSINS解算得到的相应方向的姿态和位置精度得到提高,如图6~7所示。进一步,从图8~9可以看出,通过引入里程计信息,不仅RSINS/里程计组合导航系统可以对RSINS的姿态误差及其他可观状态进行估计,提高了组合导航系统的姿态和位置精度,而且对比三种量测匹配方式的偏航角误差和定位精度可以看出,里程增量匹配方式的收敛速度和定位精度明显优于其他两种匹配方式。
(2) 容错性能验证
进一步考虑车辆行驶过程中出现打滑、滑行、侧滑或跳跃的情况,对所提方案的容错性能进行验证。
a.系统故障检测结果
各量测通道故障检测的虚警概率及各故障的检测结果分别如表2和图10所示。
图10表明所提方案可以对不同量测通道的故障进行单独检测与隔离,即使同时发生多种故障也具有较好的检测能力。对于故障幅度较大的打滑和滑行故障,故障告警期间无漏检;而对于故障幅度缓变的跳跃和侧滑故障,检测成功率相应降低,反映出新息χ2检验法对突变故障更加敏感的特点。此外,由表2可知,各通道故障检测虚警概率均约为0.1%,满足预先设置要求。
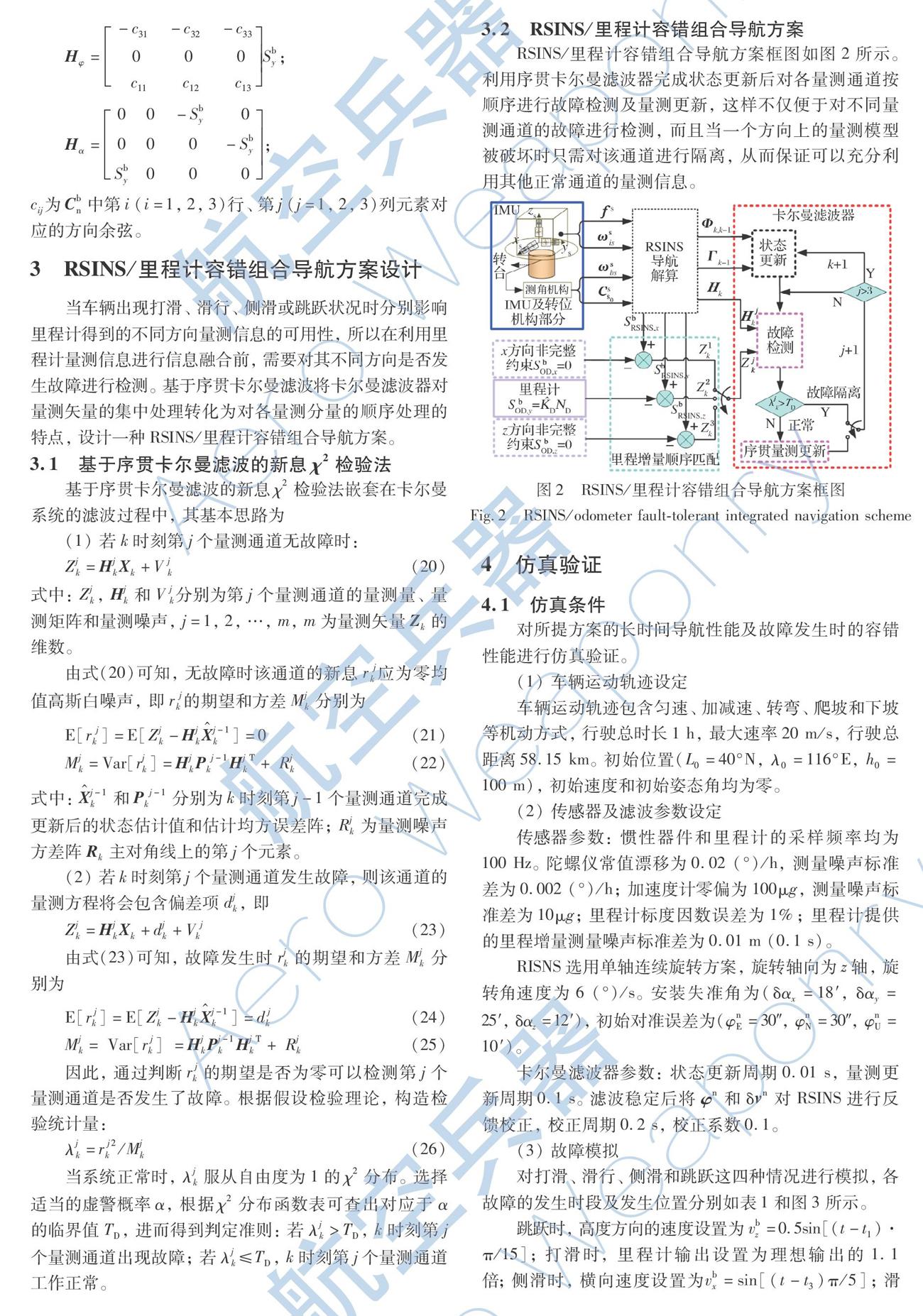
b. 组合导航结果
所提方案得到的导航误差以及εs,Δ s,δαx,δαz和δKD的估计结果如图11~17所示。由图可知,所提方案中姿态和速度误差均快速收敛,对εs,Δ s,δαx,δαz和δKD的估计结果也都收敛。而且由于φn和δvn可以得到有效估计,所以在φn和δvn的反馈校正下,RSINS解算的位置误差同样可以得到有效限制。由图13可知,系统运行1 h后定位精度可以达到0.02%D(D为行驶里程),可见所提方案也具备很好的容错性能。
5 结 论
本文针对车载运动特点,设计了一种RSINS/里程计容错组合导航信息融合方案,通过对比分析里程计的三种量测方式可见,与速度匹配和位置匹配方式相比,里程增量匹配方式不仅能够及时反映载体动态性能,而且可克服位置匹配方式中姿态失准角收敛速度慢的缺点;与传统滤波方法相比,选用的这种基于序贯卡尔曼滤波信息融合方法可以实现对不同量测通道的故障进行单独检测与隔离,从而可提高导航系统的可靠性和容错性。
参考文献:
[1] 明轩,王新龙. 自主式车载捷联惯导行进间对准方案设计[J]. 航空兵器,2016(3): 30-34.
Ming Xuan,Wang Xinlong. Design of Autonomous SINS In-Motion Alignment Scheme for Land-Vehicles[J]. Aero Weaponry,2016(3): 30-34. (in Chinese)
[2] 秦永元,张洪钺,汪叔华. 卡尔曼滤波与组合导航原理[M]. 3版. 西安:西北工业大学出版社,2015.
Qin Yongyuan,Zhang Hongyue,Wang Shuhua. Principles of Kalman Filter and Integrated Navigation[M].3rd ed. Xian:Northwestern Polytechnical University Press,2015. (in Chinese)
[3] 陈思,仲启媛,谭立龙,等. 车载定位定向技术概述[J]. 飞航导弹,2017(10): 26-30.
Chen Si,Zhong Qiyuan,Tan Lilong,et al. Overview of Vehicle Positioning and Orientation Technology[J]. Aerodynamic Missile Journal,2017(10): 26-30. (in Chinese)
[4] Wu Y X,Wu M P,Hu X P,et al. Self-Calibration for Land Navigation Using Inertial Sensors and Odometer: Observability Analysis[C]∥ AIAA Guidance,Navigation,and Control Conference,2009.
[5] Chen H,Zhang Z L,Zhou Z F,et al. SINS/OD Integrated Navigation Algorithm Based on Body Frame Position Increment for Land Vehicles[J]. Mathematical Problems in Engineering,2018: 1-11.
[6] Zhao H S,Miao L J,Shao H J. Adaptive Two-Stage Kalman Filter for SINS/Odometer Integrated Navigation Systems[J]. Journal of Navigation,2016,70(2): 242-261.
[7] 付強文,秦永元,周琪. 改进量测的车载捷联惯导/里程计组合导航算法[J]. 测控技术,2013,32(7): 134-137.
Fu Qiangwen,Qin Yongyuan,Zhou Qi. Improved Vehicular SINS/Odometer Integrated Navigation Algorithm[J]. Measurement & Control Technology,2013,32(7): 134-137. (in Chinese)
[8] Levinson E,Ter Horst J,Willcocks M. The Next Generation Marine Inertial Navigator is Here Now[C]∥IEEE Position,Location and Navigation Symposium,1994: 121-127.
[9] Sun W,Wang D X,Xu L W,et al. MEMS-Based Rotary Strapdown Inertial Navigation System[J]. Measurement,2013,46(8): 2585-2596.
[10] Fu Q W,Liu Y,Li Z B,et al. Autonomous In-Motion Alignment for Land Vehicle Strapdown Inertial Navigation System without the Aid of External Sensors[J]. Journal of Navigation,2018,71(6): 1312-1328.
[11] 翁浚,成研,秦永元,等. 车辆运动约束在SINS/OD系统故障检测中的应用[J]. 中国惯性技术学报,2013(3): 406-410.
Weng Jun,Cheng Yan,Qin Yongyuan,et al. Application of Vehicle Constraints in SINS/OD Systems Fault Detection[J]. Journal of Chinese Inertial Technology,2013(3): 406-410. (in Chinese)
[12] Wu Y X. Versatile Land Navigation Using Inertial Sensors and Odometry: Self-Calibration,In-Motion Alignment and Positioning[C]∥2014 DGON Inertial Sensors and Systems (ISS),2014: 16-17.
[13] 高亢,任顺清,陈希军,等. 车载激光捷联惯导系统初始对准可观测性分析[J]. 中国激光,2018,45(12): 47-53.
Gao Kang,Ren Shunqing,Chen Xijun,et al. Observability Analy-sis of Vehicle-Based-Laser Strapdown Inertial Navigation System Initial Alignment[J]. Chinese Journal of Lasers,2018,45(12): 47-53. (in Chinese)
Design and Performance Verification of RSINS/Odometer
Fault-Tolerant Integrated Navigation Scheme
Yang Jie1,Shen Liangliang2,Wang Xinlong1*,Cai Yuanwen3,Chen Ding4
(1. School of Astronautics,Beihang University,Beijing 100083,China;
2. Beijing Institute of Control & Electronic Technology,Beijing 100038,China;
3. Department of Graduate School,Space Engineering University,Beijing 101416,China;
4. State Key Laboratory of Space-Ground Information Technology,Beijing 100086,China)
Abstract: In order to meet the requirements of autonomous,accuracy and reliability of vehicle navigation system for weapon launch vehicles,a fault-tolerant integrated navigation scheme of RSINS/odometer is designed. Based on the analysis of the characteristics of different odometer measurement information,the RSINS/odometer integrated navigation system model based on mileage increment matching mode is established. According to the results of the observability analysis of the RSINS/odometer integrated navigation system model,an observable RSINS/odometer integrated navigation system model is established. A fault-tolerant integrated navigation information fusion scheme of RSINS/odometer based on sequential Kalman filter is designed to solve the problem that odometer measurement information may not be available during vehicle driving. Finally,the simulation results show that the RSINS/odometer fault-tolerant integrated navigation scheme can ensure the navigation accuracy and reliability of the integrated system.
Key words: SINS; rotation modulation; odometer; integrated navigation; sequential Kalman filter
收稿日期:2019-11-13
基金項目:国家自然科学基金项目(61673040);航空科学基金项目(20170151002);试验技术项目(1700050405);天地一体化信息技术国家重点实验室基金项目(2015-SGIIT-KFJJ-DH-01);重点基础研究项目(2020-JCJQ-ZD-136-12)
作者简介:杨洁(1993-),男,山西阳泉人,博士研究生,研究方向为导航、制导与控制。
通讯作者:王新龙(1969-),男,陕西渭南人,教授,研究方向为导航、制导与控制。
