基于时依等比例风险回归模型的换道时长影响因素
2021-08-07 02:11李林波邹亚杰
同济大学学报(自然科学版) 2021年7期
李林波,李 杨,邹亚杰
(同济大学道路与交通工程教育部重点实验室,上海 201804)
换道行为是指车辆(当前车辆)在行驶过程中由当前车道换至目标车道的行为,不仅涉及与前方车辆的交互影响,还受到目标车道前后车的影响。在现实交通场景中,由换道行为导致的交通事故居高不下,探索车辆换道行为的影响机理和决策机制迫在眉睫[1-3]。目前关于换道行为的研究大致可以划分为车辆换道决策过程建模[4]、车辆换道行为影响[4]、车辆换道轨迹规划和追踪建模[5-7]、车辆换道轨迹预测[8]以及换道时长影响因素[9-16]。换道时长描述了当前车辆由当前车道中心线驶至目标车道中心线所需要花费的时间。
对于换道时长的研究主要集中于换道时长分布以及换道时长影响因素。研究表明,换道时长普遍在1~16 s内,换道时长和时间段、道路类型、车流密度、车辆类型、换道方向、驾驶风格以及当前车辆与周围车辆的交互影响有关。符锌砂等[17]的研究表明,不同交通状况下高速公路换道时长服从对数正态分布,换道时长与车辆换道影响区域内的交通状况存在显著联系。张颖达等[18]指出,强制换道的平均换道时长稍大于自由换道,影响2类换道行为换道时长的因素不同,各因素的影响程度也不同。Toledo等[9]采用多变量回归模型对NGSIM(Next Generation Simulation)数据集中的换道时长进行了回归建模,车流密度、换道方向以及周边车辆干扰会显著影响换道时长的大小。Wu等[16]引入了半参数等比例风险回归模型对换道时长进行建模,不同时间段的换道时长存在显著的差异性。Vlahogianni[10]采用全参数的加速失效模型对车辆超车时长进行了建模,当前车辆与当前车道前车的速度差、当前车辆与当前车道前车的距离、目标车道后车车速以及驾驶员性别等变量显著影响换道时长。Yang等[11]采用多元回归模型对换道时长进行研究,获得的结果与Toledo等[9]的结果基本一致。以上研究均依靠换道过程中某一时刻的状态信息(如与周边车辆的相对位置、相对速度、相对加速度等)来探究换道时长的影响因素,而未曾考虑这些状态信息在换道过程中的动态特征。因此,本研究中试图将时依等比例风险回归模型[19-21]引入对换道时长的建模中。作为生存分析类模型,该模型不仅可以研究影响因素与生存时间和结局的关系[10,22-23],还能融入换道过程中的动态信息,从而完善对于换道时长机理的解析,以便更深入地把握车辆换道行为的内在特性。相比于NGSIM数据集[24],本研究中将采用具有更多车流轨迹数据与更低测量误差的HighD数据集[25]进行分析,从而提供高质量的数据支撑。
1 换道时长模型建构
1.1 换道时长生存分析
生存分析是对生存时间的分布特征进行描述,并对影响生存时间的主要因素进行分析的一种统计方法。将生存分析应用到换道时长分析中,所对应的起始时间为换道的起始时刻,即换道起点时刻;截止时间也可称为失效时间,指换道结束时刻。广义生存时间为换道时长,指换道起点时刻至结束时刻所经历的时长,与之对应的基础公式如下所示:
式中:P1(t,t+Δt)为车辆在(t,t+Δt)内完成换道的概率;P2(t,t+Δt)为时间t后车辆在(t,t+Δt)内完成换道的概率;f(t)为各时刻车辆完成换道的概率;F(t)为f(t)的分布函数;S(t)为车辆换道时长大于t的概率;h(t)为时间t后车辆完成换道的概率;H(t)为累积危险率函数。事实上,只要得知其中任意一个函数,就可以推导出其余公式。
1.2 基于时依等比例风险回归模型的换道时长建模
生存分析类函数大致可以划分为非参数类模型、半参数类模型以及参数类模型[22]。非参数类模型在估计生存函数时对生存时间的分布没有要求,根据样本观测值提供的信息,用公式计算出每一个时间点的生存函数、死亡函数、风险函数等。参数类模型根据样本观测值来估计假定的分布模型中的参数,从而获得生存函数、死亡函数、风险函数等,常用的分布有指数分布、Weibull分布、对数正态分布、对数Logistic分布以及Gamma分布等。半参数类模型不需要对生存时间的分布做出假定,但是却可以通过一个模型来分析生存时间的分布规律以及危险因素对生存时间的影响。在以上3类模型中,半参数类模型在学界得到普遍使用。由于参数类模型对于模型的假设有着较高的要求,因此当假设不满足时效果较差。非参数类模型未作任何假设,因而难以解释各自变量对于因变量的影响程度,模型的可解释性较差。半参数类模型则结合了参数类模型以及非参数类模型的特点,一方面放宽了对生存分布的假设,另一方面又保留了具有可解释的参数部分[22],因而有着更加稳健的表现。
半参数类模型中最为著名的为比例风险回归模型[20],该模型并非直接基于生存函数而是基于危险率函数进行建模,由基准危险率方程以及一个参数方程组成,如下所示:

式中:h0(t)为基本危险率函数;xi为自变量(影响换道时长的因素);bi为自变量对应的偏回归系数。
该模型中未对h0(t)作任何假定,是一个非参数部分的建模,回归系数bi则是需要根据样本进行估计的参数,是一个参数部分的建模。该模型中仅是以某一时刻的变量信息xi对因变量进行建模,然而在对因变量进行回归分析的过程中,自变量有可能也随着时间而变化,因此必须考虑自变量的时变特性。Fisher等[19]提出了考虑自变量时变特性的时依等比例风险回归模型,表达式如下所示:
式中:S(t|xi(t))为生存函数;xi(t)为随时间变化的自变量。通过极大似然函数对以上参数进行估计,极大似然函数的表达式如下所示:
式中:δi(t)为二元变量,若车辆在t时刻完成换道,其值为1,反之为0;Ri为不同观测时刻的风险集合,Ri(t)={t,x i(t),δi(t)}。不同于时不变等比例风险回归模型,在每个风险集中,自变量的值均在变化。
2 数据说明及轨迹提取
HighD数据采集于2017年至2018年间,采集地点为德国高速公路,采集时长为16.5 h,采集路程为45 000 km,总计包含11万辆车的信息。使用先进的计算机视觉算法、神经网络及贝叶斯平滑算法提取出的轨迹数据为每秒40帧,数据集中每条轨迹的坐标误差不到10 cm,这主要得益于该数据集以4K(4 096×2 160)格式采集的缘故[25]。
为了探索更为复杂情形下的换道时长机理,对换道过程中同时包含5辆车的换道轨迹进行提取与分析,如图1所示。首先,仅保留小汽车的换道轨迹,剔除卡车的换道轨迹,剔除不同时含有周边4辆车信息的小汽车换道轨迹;其次,以车辆在纵向方向上的速度为主要参考指标,同时结合车辆的加速度推断车辆换道的起始点以及截止点,如图2所示;最后,进行人工筛选以确定最终的每一条轨迹,确保同时包含5辆车的信息以及在目标车道换道过程中周边车辆的状态信息无任何的缺失。
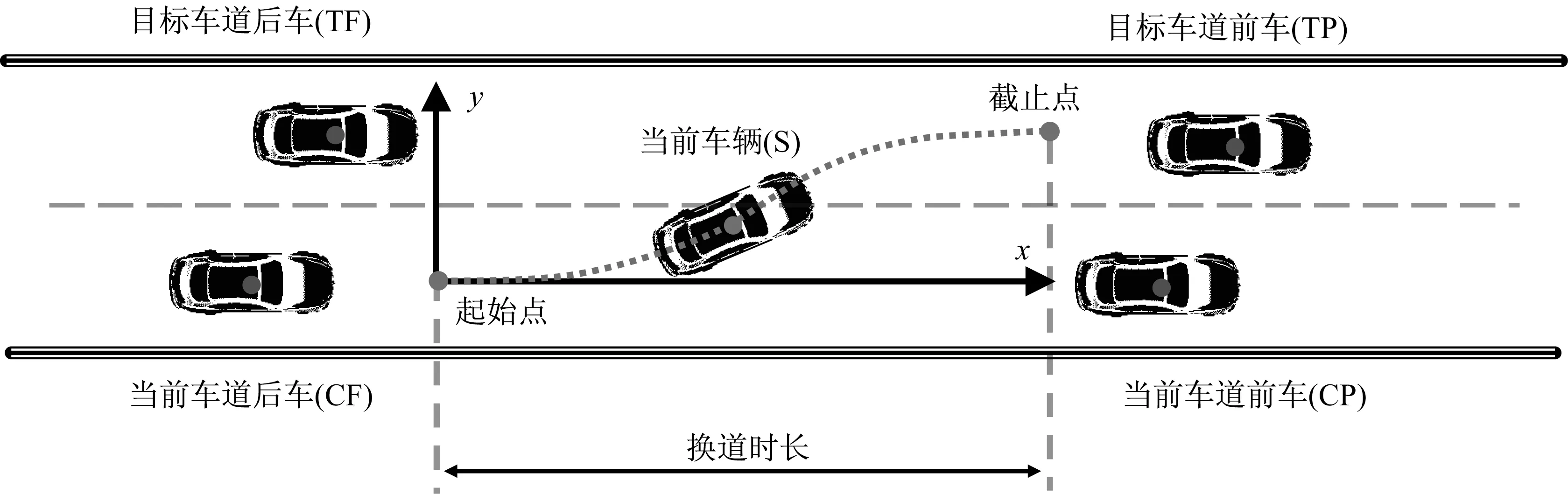
图1 换道轨迹示意图Fig.1 Schematic diagram of LC trajectory
总计提取560条有效换道轨迹,HighD数据集的每个tracks文件中所包含的有效换道次数以及该数据集换道时长整体分布如图3所示。车辆的平均换道时长为5.69 s,中位数为5.55 s,标准差为1.35 s。可以发现,中位数要略低于平均值,这说明多数车辆的换道时长是低于中位数的,部分车辆过长的换道时长拉大了整体的平均值。图4为换道轨迹集中的2条换道轨迹样本。各变量定义如表1所示。
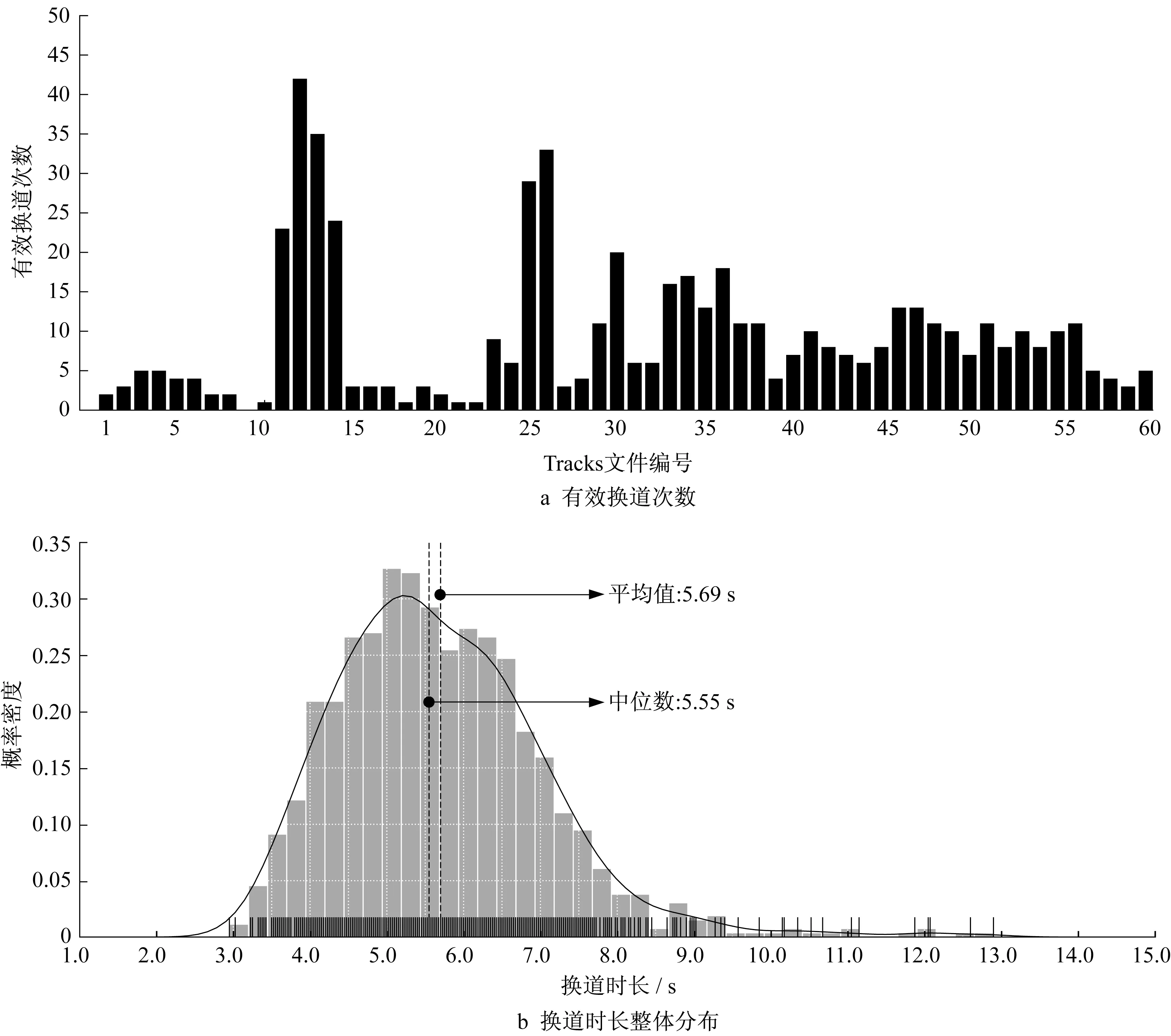
图3 HighD数据集的每个tracks文件中有效换道次数和换道时长整体分布Fig.3 Effective LC counts for each track file in HighD dataset and overall distribution of LCD
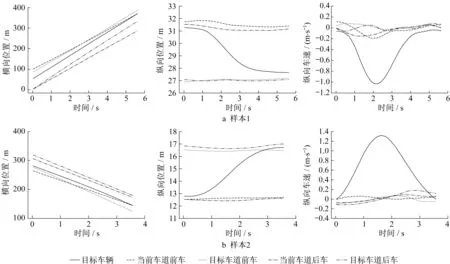
图4 HighD数据集中2条换道轨迹样本Fig.4 Two examples of LC trajectories in High D dataset

表1 各变量定义Tab.1 Definition of variables
3 模型验证及分析
3.1 整体分布结果分析
对换道时长进行回归建模,采用非参数方法KM(Kaplan-Meier)和NA(Nelson-Aalen)方法[26]对换道时长的整体部分进行估计,以获得换道时长生存函数的一个初步分析。估计方法如下所示:
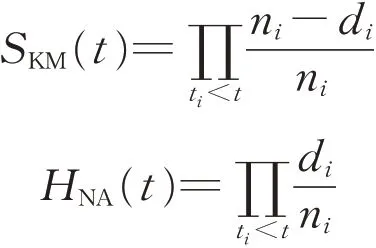
式中:d i为在时刻t完成换道的车辆数;ni为在时刻t前完成换道的车辆数。
图5为基于整体生存函数以及累积风险率函数的换道时长分布。可以发现,生存函数曲线在3 s至8 s之间时陡然下降,意味着大部分车辆在3 s至8 s之间完成换道。同时,引入中位生存时间αMST,其定义为平均50%的换道时长失效的时间,这意味着每辆车都有50%的机会完成换道操作。采用KM方法所得的中位生存时间为4.975 s(置信区间下限为4.900 s,上限为5.050 s)。在3~8 s时,生存曲线快速下降,而在8~12 s时曲线平缓下降。累积危险率函数同样也是如此,先在3~8 s时快速上升后在8~12 s时平缓上升。从表2可以得出,近15%的车辆于4 s内完成换道,近79%的车辆于6 s内完成换道,近96%的车辆于8 s内完成换道,而换道时长大于8 s的车辆仅占4%。

表2 各换道时长下尚未完成换道操作车辆所占百分比Tab.2 Percentage of at-risk vehicles at different LCDs
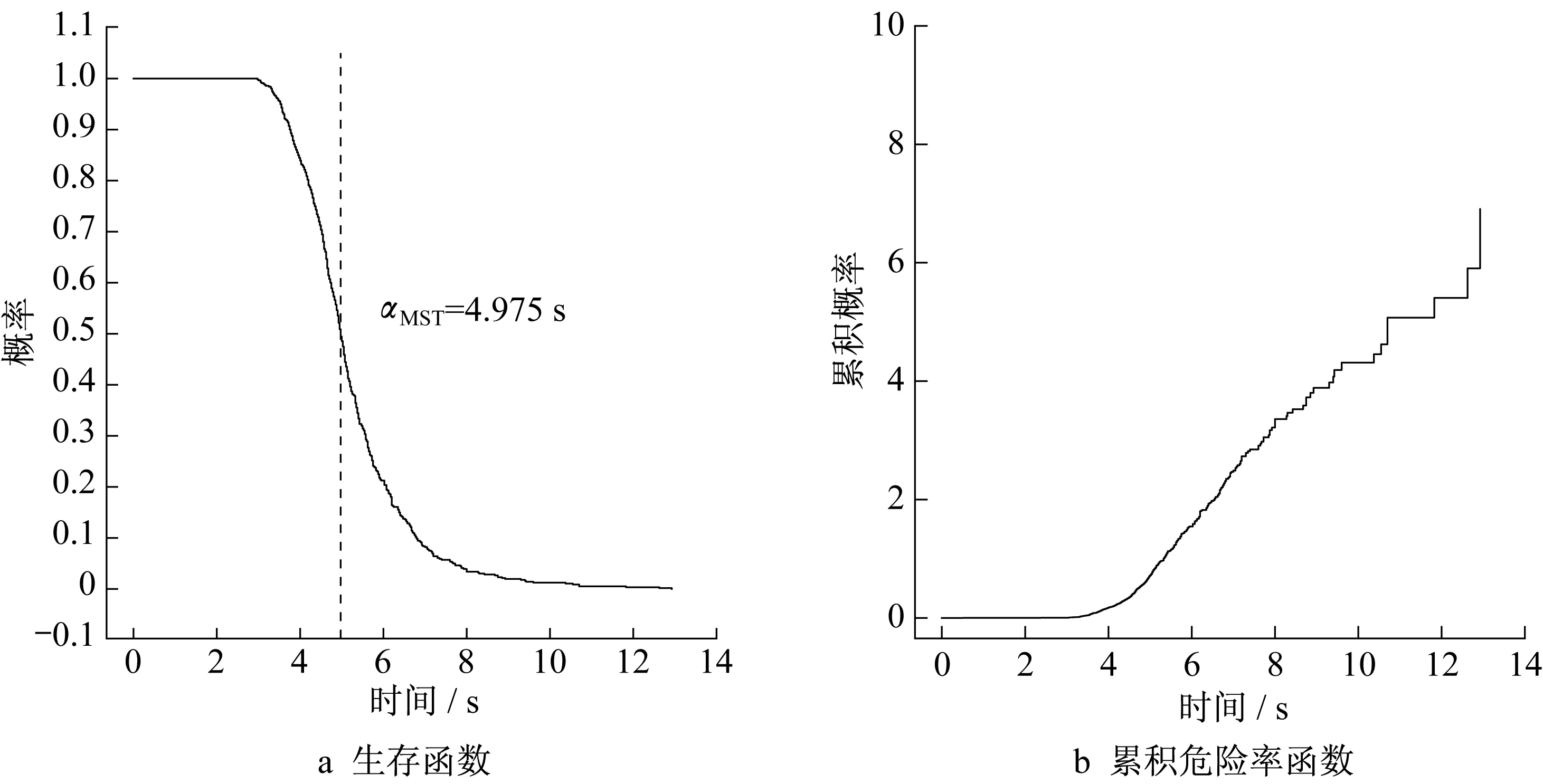
图5 基于整体生存函数和累积危险率函数的换道时长分布(KM和NA方法)Fig.5 Distribution of LCD based on overall survival function and cumulative hazard function(KM and NA method)
3.2 回归模型结果分析
由于HighD数据集的采集间隔为0.025 s,以0.100 s为间隔进行重新集聚(取其平均值)。若每条轨迹换道时长为T,则每条轨迹共有观测记录T/0.100条。每条观测记录均包含当前时间点周边车辆的速度、加速度以及位置信息。图6为时依等比例风险回归模型的输入数据格式。以0.100 s为时间间隔输入各时刻周边车辆的状态信息,为防止模型出现过拟合以及提高模型的泛化性能,引入L1和L2正则化惩罚项,并将不同轨迹的ID变量设置为聚类变量。
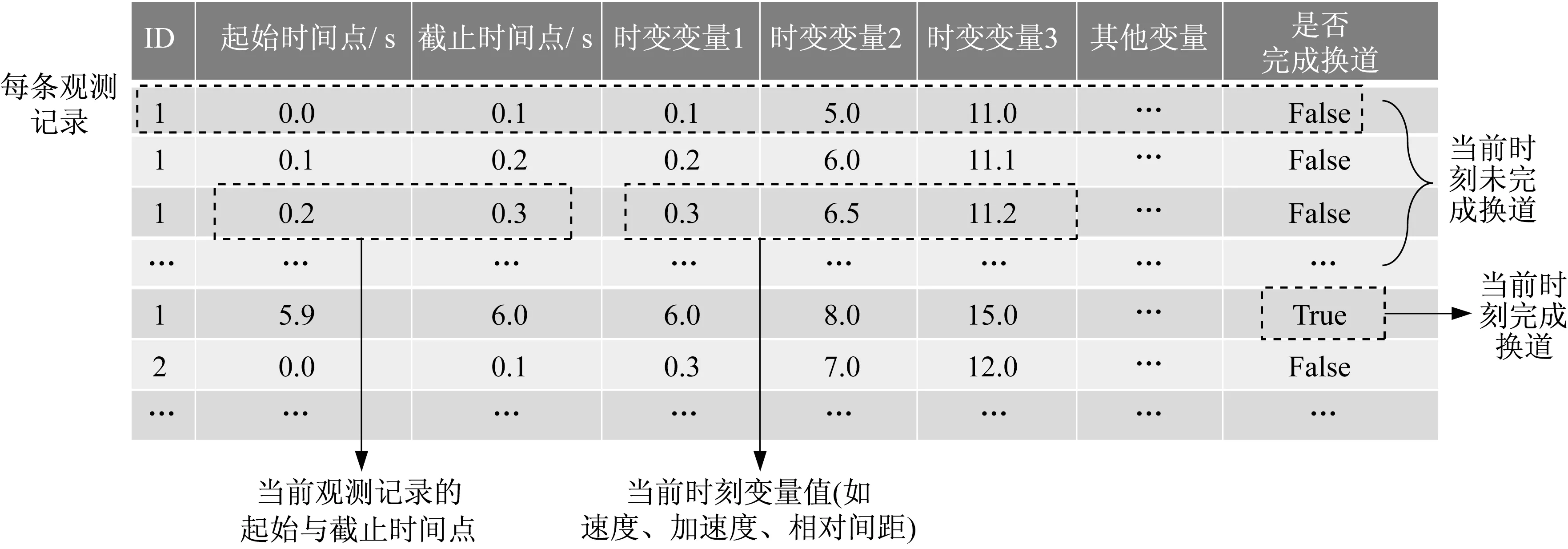
图6 时依等比例风险回归模型数据输入格式Fig.6 Data input format of time-dependent proportional-hazards regression model
时依等比例风险回归模型模拟结果如表3所示。取0.05的显著水平,共有6个变量显著影响换道时长,分别是

表3 时依等比例风险回归模型模拟结果Tab.3 Simulation results of time-dependent proportional-hazards regresssion model
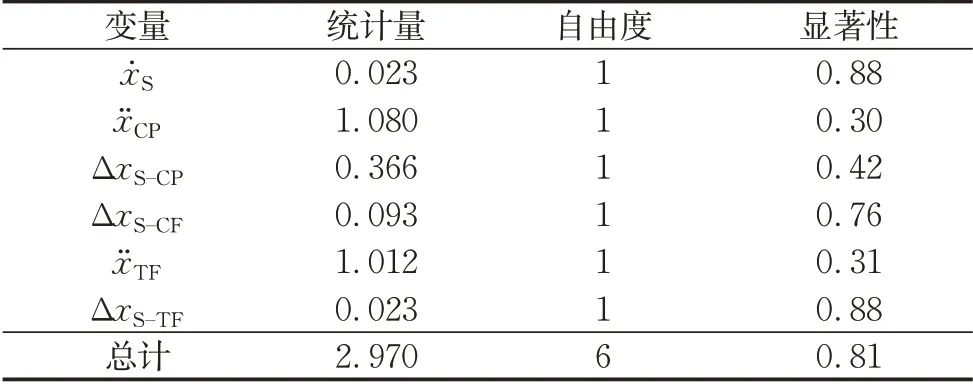
表4 比例风险检验结果Tab.4 Schoenfeld test results
4 结语
采用时依等比例风险回归模型与HighD开源数据集,总计提取了560条完整的换道轨迹(换道时长平均值为5.69 s,中位数为5.55 s),对换道时长进行深入分析。引入非参数方法对该数据集中的整体换道时长分布进行估计,发现大部分车辆在3 s至8 s内完成了换道行为;引入时依等比例风险回归模型对换道时长进行建模,发现共有6个变量显著影响换道时长,对换道时长影响最大的3个显著变量分别为当前车辆自身的车速、当前车道前车加速度、当前车道后车加速度,同时当前车道前车以及目标车道后车对当前车辆换道时长的影响最为显著。显著影响换道时长的变量可作为换道决策的参考依据,甚至可以作为换道轨迹预测算法中的输入变量,同时换道时长的平均值、中位数、中位生存时间等指标均可用以衡量不同换道轨迹集间换道行为的差异性。受限于数据集,仅依据周边车辆的运动信息对当前车辆换道时长的影响因素进行建模,后续研究可以采集驾驶员特征、天气状况、不同道路类型等数据做进一步的探索。
作者贡献说明:
李林波:相关概念及方案讨论,论文语言组织。
李 杨:数据处理及分析,实验设计及初稿撰写。
邹亚杰:论文审阅,结果分析及建议。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
数理化解题研究·综合版(2021年11期)2021-12-22
小学教学研究(2021年5期)2021-09-29
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
初中生世界·九年级(2020年2期)2020-04-10