基于SUMO软件的异构交通流仿真平台车辆模型开发与集成
2021-08-07 02:12侯德藻高兰达钱振伟李振华李一丁
同济大学学报(自然科学版) 2021年7期
侯德藻,高兰达,钱振伟,李振华,李一丁
(1.交通运输部公路科学研究院,北京 100088;2.北京经纬恒润科技股份有限公司,北京 100088)
随着自动驾驶技术的发展和应用,越来越多不同等级的自动驾驶车辆进入测试阶段。实车测试多以验证仿真策略和驾驶算法是否可行为目的,但是对于人工驾驶与自动驾驶混合所构成的异构交通流,其驾驶行为、驾驶安全和驾驶效率的评价仍然难以实现。当前研究者们主要依托各类仿真平台构建典型交通运行场景,基于面向自动驾驶优化的车辆控制策略进行驾驶行为预测,用于评估系统的运行效果[1],但针对异构交通流路网仿真缺少验证工具。国内外的交通仿真软件种类繁多,其中应用广泛的主要包括 PTV-Vissim、CORSIM(corridor simulation)/TSIS (traffic software integrated system)、Paramics、SUMO(simulation of urban mobility)等,这些仿真软件对车辆的实时速度、加速度、位置等控制策略信息进行提取和计算的实现方式都是通过编程开发的[2-4]。
基于实车参数建立了车辆控制和动力学模型,并通过采集的实车测试数据对模型进行标定。与SUMO软件集成仿真平台,通过设计的工况对集成效果进行验证。
1 需求分析和基础软件比选
1.1 需求分析
面向异构交通流的仿真平台,需要具备人工驾驶车辆运行特性、自动驾驶车辆运行特性、交通场景构建、交通运行场景再现、车辆和交通基础设施协同控制运行等仿真能力,其中亟待突破的核心关键功能需求主要包括以下几个方面:
(1)地图构建需求[5]。自动驾驶技术涉及到的关键技术——高精地图,是实现自动驾驶汽车的加速、制动、并线、跟驰以及通过平面交叉和弯坡路段自由行驶等工况仿真的基础支撑,也是建立对应仿真环境和场景还原的基础内容。只有在基于高精地图的仿真场景中,才能实现车辆行为和交通运行特性的定量、定位信息提取,开展反复验证、组合验证等。
(2)车辆及交通流运行参数记录需求。交通运行安全分析、交通管理与控制以及自动驾驶汽车运行风险评估等,都需要以单车运行轨迹和特征、交通流运行特性等数据采集和记录为基础[6-7]。
(3)外部车辆控制、外部信号灯控制等协同控制需求[8]。自动驾驶车辆和路侧智能设施,是异构交通的主要元素,仿真平台需要具备通过外部模型(包括驾驶员模型)控制交通车辆的能力以及外部指令对仿真平台中信号灯进行控制的能力。
1.2 集成软件选择
常用的交通仿真软件有Vissim、Paramics、CORSIM/TSIS以及SUMO等。Vissim软件[9]是一种微观的、基于时间间隔和驾驶行为的仿真建模工具,用于城市交通和公共交通的建模。然而,要想实现对车辆的行为控制和交通信号的控制,需要与Matlab等其他软件协同仿真来实现。作为一款微观仿真软件,Paramics[10-11]具有细致的路网建模、灵活的信号与车辆控制、完善的路径诱导、详尽的数据分析等特色,但该软件对微观车辆模型控制较为困难。CORSIM/TSIS软件[12]能够仿真真实世界中各种复杂的路网结构,也能够模拟不同的交通控制设施,如城市平叉路口的红绿灯控制、信号灯定时和自适应相位变化等,对于驾驶行为和规则的仿真,CORSIM/TSIS软件则需要通过定向开发实现。
在对软件调研的基础上,结合仿真平台的需求,最终选择SUMO软件[13]作为基础开发平台。SUMO软件是一个微观的、空间上连续、时间上离散的交通仿真软件,具备开源特性,并支持C++的二次开发。
1.3 SUMO软件平台问题分析
(1)车辆纵向运动问题
SUMO软件中车辆模型速度的计算由上下2层控制器决定。上层控制器计算该车辆下一步的最大安全速度vs,并作为期望速度输入下层控制器;下层控制器为对期望速度的执行,输出车辆能达到的实际速度[14]。
SUMO软件中内置3种实际速度的计算方法。第一种为SUMO软件默认的计算方法,如下所示:

式中:vmax为车辆最大速度;v为车辆当前速度;a为车辆最大加速度;∈为驾驶员熟练程度,其值是0~1,用来模拟驾驶员误差;vdes为vs的限值。
第二种速度计算方法为一阶迟滞法。对期望速度在限值后作一阶迟滞输出。该方法可模拟驾驶员的反应滞后性,但无车辆动力学过程。
第三种速度计算方法为后向动力学模型法。该方法提供一个燃油车动力学模型,由下一步的需求速度与当前速度作差求得需求加速度,然后通过动力学模型反向计算得到需求发动机转矩,若该转矩在发动机最大转矩范围内,则加速度与需求加速度相等,否则为发动机可提供的最大加速度。同样,需求减速度与制动系统最大减速度比较,取绝对值较小者。然而,后向动力学模型不能反映车辆通过踏板动态控制车辆运动的过程,无法模拟驾驶员的实际运动状态。
SUMO软件中内置的3种速度计算方法过于简单,与实际车辆速度存在较大差距,无法满足仿真平台研究的需求,需开发新的纵向动力学模型集成到SUMO软件中。
(2)车辆横向运动问题
SUMO软件本身的横向控制方式有2种[15],即瞬间变道和以恒定车速变道。在瞬间变道模式下,车辆瞬间由当前车道变换到目标车道;在恒定车速变道模式下,通过设置变道时间,结合2条道路中心线的距离,计算出恒定车速进行变道。以上2种方式均未考虑车辆的实际变道过程。
2 基于SUMO软件的车辆模型构建
2.1 车辆模型构建思路
根据车辆动力学理论,为了达到一定要求的模型保真度,并满足转向系统、车身稳定系统等电控系统的测试要求,车辆模型需要包含丰富的部件模型,主要部件模型包括转向系统模型、车体动力学模型、悬架系统模型、制动系统模型、轮胎模型、道路模型、驾驶员模型、车辆空气阻力模型、简单动力系统模型、底盘以及辅助驾驶系统相关软控制器模型等。
在较为成熟的车辆模型商业软件领域,车辆模型可以测试底盘电控系统与各种动力电控系统(含新能源电控系统),如车身稳定系统(ESP)、转向助力系统(EPS)、制动主动增压系统(Ibooster)等,也是仿真测试的必要条件。
自动驾驶车辆的电控系统非常繁杂,因此车辆模型的构建也更加困难。目前成熟的商业软件如Carsim、Carmaker以及Tesis系列都提供了一套结构极其复杂的软件,这些软件要完成各类工况测试,对计算机性能要求较高。考虑到异构交通中对于仿真车辆的数量要求以及对于仿真场景的工况复杂度要求,简单的单车模型叠加不仅成本巨大且效率十分低下,需要结合实际需求对模型进行简化并有针对性地集成。
基于SUMO软件对原有车辆模型进行优化,将对于车辆的控制解耦成横向控制和纵向控制2个部分,每一种控制方式包含必要的车辆执行机构。这种解耦方式不仅可以大大降低整个车辆模型的复杂度和计算量,同时也有利于和SUMO软件进行有效集成。为解决车辆模型简化导致的仿真效果与实际情况存在偏差等问题,可通过大量的实车数据对模型进行标定与修正,使得车辆模型的控制效果满足一定的保真度。
2.2 车辆动力学模型开发
(1)车辆纵向动力学模型
车辆纵向动力学模型通过I/O(input/output)共享数据接口连接动力系统、制动系统、单轨系统。动力系统由电机、电池和传动系统组成。通过加速踏板开度和电机转速查找Map图得到电机需求扭矩,再通过电池、电机Map图查找电机实际输出扭矩和电池的荷电状态(SOC),经由传动系统向车轮输出扭矩。在每一个计算步长,向动力系统输入加速踏板开度、当前车速信息,动力系统将驱动扭矩输出到I/O共享数据。
制动系统由制动主缸和制动轮缸组成,通过制动踏板开度查找Map图得到制动主缸压力,再由制动主缸压力查找各轮缸压力,由轮缸压力得到各车轮相应制动力矩。在每一个计算步长,向制动系统输入制动踏板开度,制动系统将制动力矩输出到I/O共享数据,如下所示:

式中:T为车轮扭矩;P为驾驶员踏板输入(制动踏板或加速踏板);M为查表过程。
通过计算得到的扭矩获得加速度,用以更新车速,查表方式不仅能够有效地模拟具体的实车表现,还可提升计算效率。
纵向控制采用加速度或比例-积分-微分(PID)速度跟踪控制,经仿真测试,原平台采用PID公式进行目标速度跟踪时,车辆速度增长过慢,该公式不适用于速度控制。因此,采用加速度控制,如下所示:

式中:a(k)为第k步加速度;Kp、Ki、Kd为PID参数;e(k)为第k步加速度误差;umax为踏板最大开度;|u(n)|为第n步踏板开度绝对值。
(2)车辆横向运动学模型
车辆的横向运动由车辆运动学模型计算,通过输入方向盘转角,由Map图查找横拉杆位移,再由横拉杆位移Map图查找左右前轮的车轮转角。由车辆当前速度乘以车轮转角的正弦值,得到车辆的横向速度,如下所示:
式中:vL为车辆的横向速度;α为前轮转角。横向速度通过前轮转角更新,而前轮转角与动力系统类似,通过方向盘Steer对应的查表值得到。
横向控制采用PID方向盘转角控制系统,以换道的完成程度作为误差量,对方向盘转角进行PID调节,如下所示:
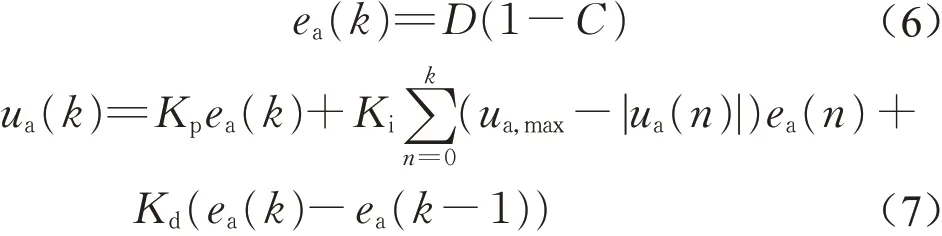
式中:ua(k)为第k步方向盘转角;ea(k)为换道完成方向盘转角误差;D为换道方向,左转为-1,右转为1;C为换道完成程度,在0至1之间;ua,max为最大方向盘转角;|ua(n)|为第n步方向盘转角绝对值。
当换道即将结束时,ea(k)越来越小,导致方向盘转角过小,使得换道过程需较长时间结束。驾驶员驾驶车辆时,存在一定的操纵误差,离该车道的道路中心线会有一定程度的偏离。为解决上述问题,设定:当C>0.9时,即认为换道完成。
构建的车辆动力学模型是基于一款双电机后驱电动车辆开发的,由车辆的动力传动模型、制动系统模型、转向系统模型与驾驶员模型组成,如图1所示。
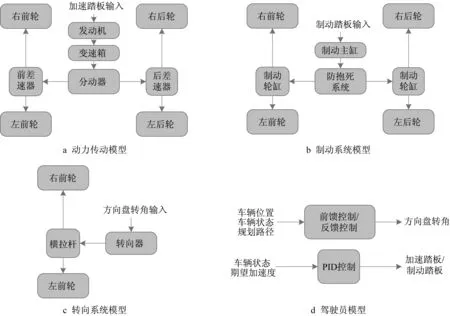
图1 车辆动力学模型Fig.1 Dynamics model of vehicle
2.3 车辆模型标定
通过分类整理实车试验数据,提取关键输入和输出数据作为对标对象;调试车辆模型,将模型仿真结果和试验数据进行对标,并反馈优化模型,从而保证控制逻辑和控制特性与真实的控制系统控制效果保持一致。
2.3.1 实车数据选择
为保证实车数据采集的可复现性和可操作性,选取50 km·h-1和100 km·h-1下空载和满载2种状态,采用踏板行程下的制动减速度以及紧急制动下的速度和加速度数据对车辆模型进行对标。
2.3.2 对标过程和结果
采用自研的ModelBase仿真软件实现模型对标。
(1)在ModelBase仿真平台里设置仿真参数,包括仿真工况、道路路况、车辆等参数。
(2)仿真结束后,将ModelBase保存的仿真数据转成Excel格式。
(3)使用Python软件处理仿真数据。读取仿真数据集和对标数据集,根据对标数据集类型将仿真数据分组,比较对应组别的仿真数据和对标数据,计算偏差值集。
(4)将选出的仿真数据集与对标数据集进行可视化对比,并归纳数据对标结果。
(5)优化车辆模型,并再次仿真对标。
不同工况时踏板行程下制动减速度和紧急制动下速度的对标结果如图2和图3所示。
制动过程中,随着踏板行程逐步由0至1,车辆的制动减速度也逐步加大。ModelBase的仿真数据与实车数据的趋势大致相同,最后完全刹住车时的制动减速度输出趋于一致。
本试验的内容是不同工况下的车辆紧急制动,得到的数据是车辆在制动过程中的速度数据。从不同工况下的速度曲线可以看出,ModelBase仿真数据与实车数据极为接近,而且在偏差值上也保持着较小的允许范围。
3 车辆模型与SUMO软件的集成开发
基于SUMO软件的开源特性,研究SUMO软件关于车辆运动状态控制的底层代码,梳理其控制车辆纵向位移和横向位移的具体逻辑。将开发的车辆模型嵌入SUMO软件的源代码中并替换原有车辆运动状态的控制逻辑,完成仿真平台与车辆模型的集成开发。
3.1 车辆纵向控制开发
将SUMO软件系统跟驰模型给出的期望速度作为车辆模型的输入,通过动力传动模型(包含制动模型)计算车辆真实的纵向速度并更新车辆的当前位置。纵向控制开发原理如图4所示。
3.2 车辆横向控制开发
将SUMO软件换道模型给出的变道请求及目标横向距离作为车辆模型的输入,通过转向模型计算车辆的前轮转角,给出车辆的横向速度并更新车辆的当前位置。横向控制原理如图5所示。
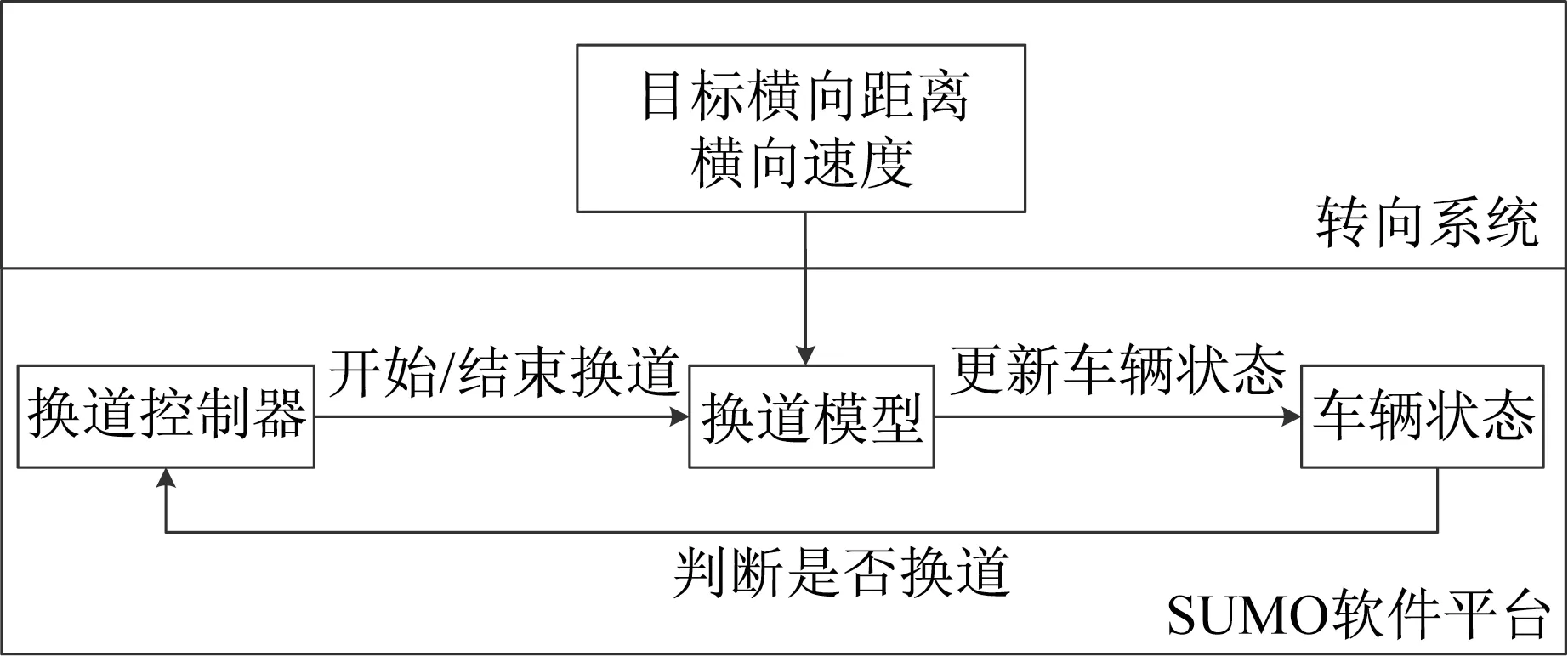
图5 横向控制原理Fig.5 Horizontal control principle
4 平台仿真验证
为对基于SUMO软件优化的仿真平台进行验证,在平台中构建一个2 km长的直行双向四车道道路,1 km处设置红绿灯交叉口,设计加减速、跟驰和交叉口通行3种工况。基于SUMO软件优化的仿真界面如图6所示。
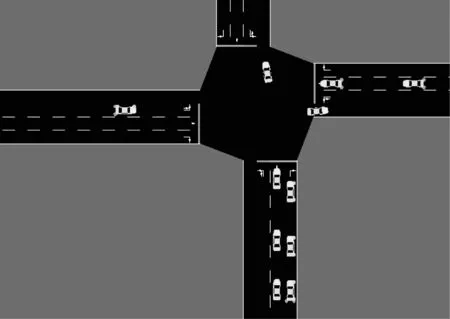
图6 仿真界面Fig.6 Simulation interface
4.1 加减速工况检验
假定车辆从速度零开始行驶,最后以速度零结束行驶。SUMO软件默认车辆模型和优化后车辆模型的车辆运动速度和加速度对比如图7所示。从图7可以看出,优化后车辆模型速度和加速度控制更加接近实际驾驶状态。
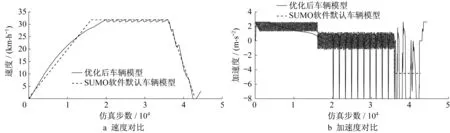
图7 加减速工况速度和加速度对比Fig.7 Comparison of speed and acceleration under acceleration and deceleration scenarios
4.2 跟驰工况检验
假定在本车前方(本车行驶车道起点的500 m处)添加前车。跟驰工况有3种形式:前车静止、本车和前车正常跟驰(前车车速小于本车)和跟驰之后前车急停并恢复速度。SUMO软件默认车辆模型和优化后车辆模型在3种跟驰工况下速度和加速度对比如图8~10所示。可以看出,优化后车辆模型速度和加速度变化平缓,尤其加速度控制更加接近实际驾驶状态。

图8 前车静止工况速度和加速度的对比Fig.8 Comparison of speed and acceleration under preceding vehicle stationary
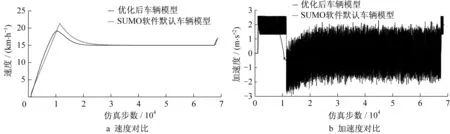
图9 本车和前车正常跟驰工况速度和加速度对比Fig.9 Comparison of speed and acceleration under normal car-following condition of current car and preceding car
4.3 交叉口通行工况检验
在单车道路信号前,增加一个车辆检测器,当车辆通过检测器时,车辆行驶方向上的交通灯变红,拦住车辆。SUMO软件默认车辆模型和优化后车辆模型的速度和加速度对比如图11所示。从图11可以看出,在交叉口通行工况下,优化后车辆模型速度和加速度的控制效果更平缓,更加接近实际驾驶状态。
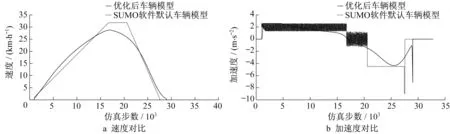
图11 交叉口通行工况速度和加速度对比Fig.11 Comparison of velocity and acceleration under intersection scenario

图10 前车急停并恢复速度工况速度和加速度对比Fig.10 Comparison of speed and acceleration under condition of stopping sharply and resuming speed
5 结论
基于人工驾驶与自动驾驶混合异构交通流的仿真需求分析和基础仿真软件平台比选,搭建和标定了SUMO软件车辆控制和车辆动力学模型,并实现与SUMO软件的集成。通过平台验证发现,相比SUMO软件默认车辆模型,优化后车辆模型在控制效果方面更接近实际驾驶状态。该优化平台可以支撑异构交通中驾驶行为和交通流安全评价研究。异构交通具有群体性,路网的仿真验证需要仿真平台能够支撑几百辆车的运行,对平台载体的计算能力要求较高,如何平衡和优化计算能力,是未来仿真平台需要解决的问题。
作者贡献说明:
侯德藻:仿真平台整体功能及架构讨论,论文审阅。
高兰达:仿真平台调研,平台功能测试方案建立,论文语言组织,结果分析和建议。
钱振伟:车辆模型建立,平台集成开发以及仿真环境搭建。李振华:车辆模型建立,仿真验证测试方案讨论。李一丁:仿真平台功能测试验证,仿真结果分析。
猜你喜欢
当代水产(2022年6期)2022-06-29
小资CHIC!ELEGANCE(2019年20期)2019-07-02
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
中国建筑金属结构(2018年4期)2018-05-23
读写算·素质教育论坛(2017年16期)2017-08-04
教育界·下旬(2016年4期)2016-11-19
新高考·高一物理(2015年5期)2015-08-18
飞天(2011年20期)2011-08-15
戏剧之家(2010年2期)2010-08-15