
基于多目标优化算法的交叉路口信号灯配时模型研究
2021-08-09 11:27郝林倩
智能计算机与应用 2021年3期
关键词:交叉口
郝林倩
摘 要: 当前国内道路交通管制仍然主要依靠交通信号灯,依然是传统的三色灯固定配时模式,这种模式最大的弊端在于不能针对交通流的实时变化进行动态配时调整,从而造成道路资源的浪费。对多目标算法进行优化,并提出一种交叉路口信号灯智能配时模型。又利用实际数据对模型进行了测试分析。实验证明,该模型能有效减少机动车的平均延迟时间和停车次数,从而提升道路的通行效率。
关键词: 交叉口; 交通流预测; 动态配时; 多目标优化算法
文章编号: 2095-2163(2021)03-0154-05 中图分类号:TP391 文献标志码:A
【Abstract】At present, road traffic control in China still mainly relies on traffic signal lights, which is still the traditional three-color light fixed timing mode. The biggest drawback of this mode is that it cannot adjust the dynamic timing according to the real-time changes of traffic flow, resulting in waste of road resources. Based on the optimization of multi-objective algorithm, a dynamic timing model of intersection signal is proposed. And the model is tested and analyzed by using the actual data. The results show that the model can not only effectively reduce the average delay time and parking times, but also improve the maximum flow capacity of the road.
【Key words】 intersection; traffic flow prediction; dynamic timing; multi-objective optimization algorithm
0 引 言
当前,堵车现象已成为城市道路交通中令人困扰的问题之一,究其成因,既有生活水平提高带来的家庭用车数量增加和城市道路交通容量迹近饱和的缘故,但也有交通管制与引导不科学所致。国内的道路交通管制目前主要依靠交通信号灯的控制,仍然是传统的三色灯固定配时模式,这种模式的弊端就在于不能针对交通流的实时变化进行动态配时调整,从而造成道路资源的浪费。本文在对多目标算法进行优化的基础上,提出了一种交叉路口信号灯动态配时模型。并利用实际数据对模型进行了测试分析。实验证明,该模型能有效减少机动车的平均延迟时间和停车次数,从而提升道路的通行效率。
1 多目标优化理论
1.1 多目标优化的数学描述
现实中,很多事务都存在有多个指标需要同时满足的情况,即同一问题模型中存在多个非线性目标,这些目标函数都需要优化,但函数之间往往相互冲突。类似这样的问题,又称为多目标优化问题[1](Muti-Objective Optimization Problem,MOP),其数学描述如下。
设有M个目标函数,n维决策变量和K种约束条件组成,最优化目标如下:
1.2 多目标算法的优化
在多目标优化问题中,每个指标必须各有权重,不可能都同时达到最优。其中,某些指标是相互依存的,而另一些则是矛盾的[3]。在实际应用中,有必要综合考虑矛盾的子目标,即权衡每个子目标。根据生物进化论发展起来的多目标进化算法(multi-Objective evolutionary algorithm,MOEA),由于其在解决高度复杂的非线性问题方面的优势,已被广泛使用。
多目标进化算法是指在各目标之间进行协调权衡和折衷处理操作,最终得到一组各个目标值所折衷的最优解,称为 Pareto最优解[4]。Pareto最優解只是一个可接受的解,并且大多数进化算法的Pareto最优解的个数是无穷多的,而进化算法的最优解就是包含所有这些Pareto最优解的一个集合。在实际应用中,最优解集合的选择通常取决于决策者对事务本身的了解程度,或个人意愿倾向 [5]。在此,经常会用到如下几个基本概念[6]:
(1) Pareto支配(Pareto Dominance)。解x0支配:x1(x0>x1),当且仅当:
(2)Pareto最优解(Pareto Optimal Solution)。如果解x0是Pareto最优的,当且仅当:x1:x1>x0。
(4)Pareto前沿(Pareto Front)。所有Pareto最优解对应的目标函数值所形成的区域P:
如果某个解不受其所在的解集内的任何一个解支配,则该解关于解集非劣,称为非劣解。后期的多目标算法的计算过程如下:对于每一个集群,首先找到其当前的最优解,即非控制解或非劣解,并且所有非劣解的集合构成非劣解集;然后,通过各种遗传运算以及非劣解集的更新和升级,非劣解集不断接近问题的Pareto前沿,算法最终的输出即为非劣解集[6]。
这里,需要说明的是,Fε和Fa分别作为集合F的ε-Pareto解集和ε-Pareto近似最优解集,都不是唯一的。而一些靠近Pareto前端不是Pareto最优解但满足ε-支配关系的个体却都有可能包含在Fa中[7]。
2 基于多目标优化的信号灯配时模型
理论上,研究拟控制交叉路口的信号灯变化,从而优化城市道路的各项参数,但实际上,道路参数却并非臻至完善,因为不同指标之间可能存在一些冲突,因此必须做出相应的调整,为十字路口的交通状况选择合适的控制方案。如果交通流量较小,应尽可能减少在十字路口停车的车辆数量,以减少机动车辆的停车位;如果交通流量大,则应提高交叉路口的交通速度[8]。交叉路口交通信号控制的意义在于:根据交通网络中的交通流量,有效调整信号定时方案,以优化交通,提高交通效率。一般交叉路口的评价指标分为3种,即:出行时间效率、道路利用率、环境效益。其中,车辆通行效率和等待时间对信号灯的配时方案影响最大。因此,本次研究选择交通效率、停留时间和停车次数作为优化指标,并且优化目标是争取交叉路口的最高交通效率、最短停留时间和最少停车时间。约束条件选取周期长度、有效绿灯时间和机动车等待的最大数量3种,对交叉路口非饱和交通流的信号配时方案进行了优化[9]。
2.1 机动车停留时间
目前主流的交通停留模型有:Webster模型、HCM模型和Akcelik模型。Akcelik模型适用于计算过饱和情况下的机动车停留时间。本文中釆用Akcelik模型,见公式(4):
其中,考虑不完全停车的情况,f为停车次数修正系数,取值为0.9。
机动车在r时间段上,平均停车次数见公式(10):
其中,hrij 为在r时间段上由相位i到相位j每辆车的平均停车次数,单位为次。
这里,对研究时需用到的各种约束条件做阐释说明如下。
(1)总时长约束。具体公式如下:
其中,lk表示k相位损失时间,取各相位绿灯间隔时间。
(2)有效绿灯时间约束。具体公式如下:
其中,gkmin表示k相位最短绿灯时间,此处取4 s。
(3)周期约束。具体公式如下:
其中,Cmax表示最大信号周期,一般取值为Cmax=200 s。Cmin表示最短信号周期,即在一个周期内,无滞留机动车。研究可推得数学公式为:
(4)排队长度约束。具体公式如下:
其中,Nrijmax=DijC·L 表示车道内最大滞留机动车数;此处的Dij表示相邻交叉口距离;L为机动车队列的平均长度。
在综合考虑通行效率、停车次数和停车时间3项优化指标和3种约束条件的情况下,创建交叉路口信号灯状态控制函数为:
3 实验与分析
在测试分析阶段,选择罗文慧的改进蜻蜓算法[5](下文用HDA表示),结合真实的城市道路情况对模型进行测试。测试分析结果详见如下。
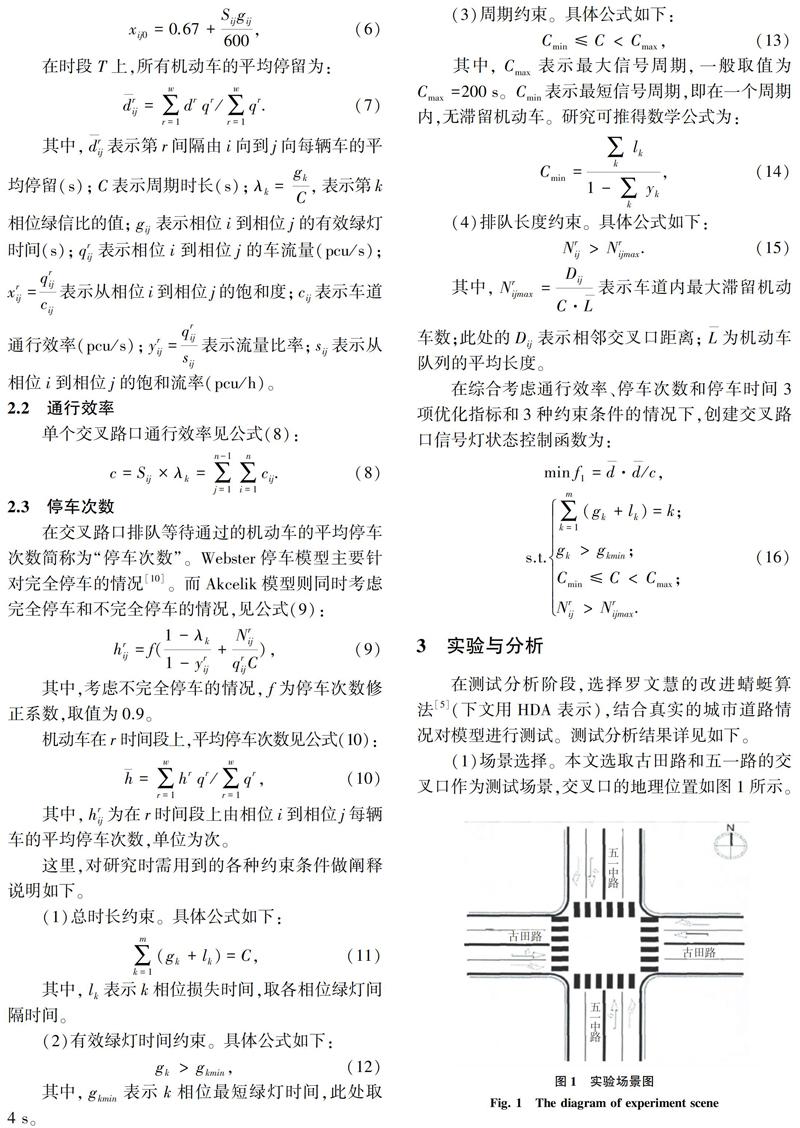
(1)场景选择。本文选取古田路和五一路的交叉口作为测试场景,交叉口的地理位置如图1所示。
由图1可看出,交叉路口由东西方向和南北方向的2条城市主干路的交叉点组成。 东入口有一个右转弯车道和一条左转弯直行车道; 西入口有一个右转弯车道和一条左转弯直车道; 南入口处有一个右转弯车道和一条左转弯直车道; 北入口处有一个右转弯车道和一条左转弯直车道。
(2)信号灯配时参数。信号灯的变化除了可以控制交叉路口的机动车通行,对非机动车和行人也具有同样的管控作用,设置信号灯的相位为2相位,C=100,相位设置图及相位配时图如图2、图3所示。
(3)存在的问题。无论高峰时段,还是非高峰时段,此路口的拥堵现象都较为明显,路口等待通行的机动车较多,且在等候中停车次数较多,导致路口通行效率不高。
(4)结果分析。交叉路口通行基本参数见表1。由表1可见,文中选择的古田路与五一中路交叉路口四个不同方向进口的车流方向、校正后的饱和流量、高峰时段每小时的交通量和流量比值。
同时,研究得到的实验结果见表2。
4 结束语
分析可知,在表2中,通过对比可以看出,当车流量处于非高峰时段时,HAD模型的优势并不明显。但在车流量较大的高峰时段,优化后的HAD模型的优良性能将逐渐体现出来,即使得通过交叉路口的机动车停留时间更短,停车次数更少,显著提高了城市交叉路口的通行效率。
参考文献
[1] 郑夏,马良. 一种多目标非线性优化的NSGA-II改进算法[J]. 微电子学与计算机,2020,37(7):47-53.
[2] 马晓幸,杨华. 基于NSGA-Ⅱ的多目标控制算法的温室监测控制系统[J]. 农村实用技术,2019(1):28-31.
[3] 张志勇. 波纹钢管—UHPC组合防撞结构冲击试验及多目标优化研究[D]. 长沙:湖南大学,2019.
[4] 魏武,郭燕. 基于拥挤距离的动态粒子群多目标优化算法[J]. 计算机工程与设计, 2011,32(4):1422-1425,1452.
[5] 罗文慧. 智慧交通背景下道路交叉口交通流控制模型与算法研究[D]. 北京:北京交通大学,2018.
[6] 李云彬. 多目标人工蜂群算法的研究与应用[D]. 沈阳:东北大学,2012.
[7] 李陽. 三层光网络中静态虚拓扑设计的多目标智能优化算法研究[D]. 西安:西安电子科技大学,2012.
[8] 刘烽. 基于多目标进化算法的流程工业生产调度问题研究[D]. 长沙:国防科学技术大学,2009.
[9] 李晓. 自主水下机器人非连续目标跟踪方法研究[D]. 沈阳:东北大学,2015.
[10]刘婷婷. 基于反馈的多目标人工蜂群算法研究[D]. 沈阳:东北大学,2013.
猜你喜欢
科技研究·理论版(2022年9期)2022-07-13
物流科技(2022年2期)2022-05-07
科技资讯(2017年18期)2017-07-19
科技视界(2017年3期)2017-05-20
中国科技纵横(2017年7期)2017-05-16
科技资讯(2016年35期)2017-04-20
物流科技(2016年12期)2017-04-01
山东工业技术(2017年4期)2017-03-28
科技创新与应用(2016年36期)2017-02-21
新课程·上旬(2016年9期)2016-11-29
