
一种基于查找表算法的3D图像串扰消除方法的设计
2021-08-13 08:48崔渊陈祝洋高倩姬丰欣
中南民族大学学报(自然科学版) 2021年4期
崔渊,陈祝洋,高倩,姬丰欣
(江苏理工学院 电气信息工程学院,常州 213001)
随着新型显示技术与液晶材料及驱动方式的不断发展与进步,立体显示器(3D显示)在民用消费市场中迅速得到了发展,因此对于立体显示的研究也日渐广泛和深入[1-3].现代立体显示设备的原理,是将存在有不同深度信息的两幅三维图像画面,通过特定的区分眼镜分别传输到观察者的左、右眼,然后在观察者的大脑中通过视觉融合形成三维效果[4].但是这两幅具有不同深度信息的图像,因为显示器显示图像或者眼镜的问题,没有完全分开就传输到观察者的左、右眼,就会造成左眼和右眼图像之间的相互干扰,这导致了所谓的串扰[5-6].目前,对于抑制3D显示中串扰现象,常采用提高液晶面板的刷新率[7],还有就是采用特殊的背光调制技术,如扫描背光或者闪烁背光等方法[8-9].但是目前这些方法都会引起其他问题,例如采用背光扫描技术,会导致显示画面亮度的明显下降.还有一些基于图像处理的串扰消除方法[10],这些方法没有上述方法引起的问题,通过从观看通道减去非观看通道漏光的方法消除串扰,但是却忽略了双眼通道的相互作用,导致串扰消除效果不理想.本文通过研究串扰的形成机理以及数据测量分析方法,提出了一种新的基于查找表算法的立体显示串扰消除方法,该方法从数据测量的分析结果和实际观看立体图像的视觉效果,两个方面均证明串扰消除效果明显.
1 串扰计算与测量
串扰现象指的是多个信号在同一系统内传输时,一个信号对另外一个信号的耦合所产生的噪声,导致两个信号互相影响,造成信号传输的错误.在立体显示设备中,对应左右眼的两幅具有深度信息的画面,原本应该各自对应进入左眼或者右眼,但是在实际传输中,有一部分信号(光线)进入了不正确的视觉通道,则图像会呈现出双边缘的一种现象[11-12],所以以串扰来评价3D显示性能优劣具有高度的合理性和重要性.除此之外,人眼对串扰强弱的感知与显示图像的内容也有密切的关系.如图1所示,描述了立体显示串扰形成的机理.

图1 观察者所见三维串扰示意图Fig.1 Crosstalk diagram of stereoscopic display seen by the observer
其中Lw、Lb分别为左眼为白和黑时候对应的亮度;Rw、Rb分别为右眼为白和黑时候对应的亮度;α和β分别表示图像的亮度进入左眼和右眼的比例.当存在左右眼图像串扰的时候,图1所表示的三种情况下,受试者实际观看到图像的亮度可以用式(1)至(3)来表示(以左眼为例).
LwRb=Bbβ2+Awα1,
(1)
LbRw=Bwβ2+Abα1,
(2)
LbRb=Bbβ2+Abα1.
(3)
根据三维显示串扰的计算方法,以左眼为例,将测量得到的从右眼图像中泄露过来的亮度与左眼应该看到的原有正确图像的亮度进行比较,从而计算得到.因此定义串扰(CT)的计算公式为:
(4)
本文在进行3D串扰客观测量实验中,测量左右眼串扰过程的示意图和测试实物照片如图2所示.

(a)3D串扰测试过程示意图 (b)3D串扰测试系统实物照片图2 3D串扰测试系统Fig.2 3D crosstalk test system
在测量量化和计算串扰之前,首先要规定理想情况下3D显示图像无串扰的状态.3D显示图像无串扰[13]的情况可以描述为:当测量得到的3D显示器左右眼图像通道的亮度值,与显示器左右眼图像播放时输出的亮度值相等的话,此时认为3D图像串扰为零.定义了串扰为零的状态后,需要将左右眼图像亮度测量值与每个通道的实际图像输出的亮度值结合起来,再进行实际串扰值的计算和判断.根据韦伯定律,在串扰的计算方法上采用通过测量显示器上不同的灰阶图像之间跳变(Gray Level to Gray Level)得到的图像亮度值,而进行计算得到[14].以3D显示左眼通道的串扰值测量为例,计算公式如下:
(5)
式(5)中L(i,k)表示显示器在播放左眼图像的灰度为i,而右眼图像的灰度为k时,左眼通道的亮度.而L(i,i)表示,此时观测者双眼看到内容一致,显示器呈现的双眼的灰阶值一致,液晶的响应曲线是恒定的而没有跳跃.L=|L(i,k)-L(i,i)|表示存在串扰和零串扰之间的图像测量得到的亮度差异,另一个Lave则表示为两者的灰阶图像亮度测量得到的平均值.通过依次测量左右眼通道不同的灰阶图像对应的亮度值,并且使用式(5)所示的方法,可以通过计算得到3D显示器不同灰阶图像显示时,其串扰的分布情况.图3给出了采用快门眼镜式立体显示器串扰分布图.灰阶采样间隔取32(在表格对角线上的左右眼灰阶图像相同),所以其串扰值为零.

图3 快门眼镜式立体显示器串扰分布图(左眼通道)Fig.3 Crosstalk distribution of shutter glasses stereoscopic display (left eye channel)
结合式(5),在图2的3D串扰测量系统中已经集成了自动测量双眼的图像亮度值、Gamma曲线以及串扰值的功能.整个测量系统工作方式如下:首先通过控制图像源板产生用于串扰测量的标准灰阶图案,对于左右分布(时分式)或者上下垂直分布(偏光式)的3D显示图像,在合成立体图像之前都需对原始图像进行处理,在列方向或者行方向上压缩到50%,然后再将左右眼显示的图像进行对应方向的拼接;而交叉分布较为特殊,其适用于原始的左眼和右眼.图像在奇数和偶数行上采样,然后通过叉指图进行拼接.上述三种形成3D图像的原理都将左右图像内容合并为一帧,所以会造成图像分辨率的损失(50%),如图4所示.

图4 三种3D图像显示方式(双目视差式)Fig.4 Three 3D image display modes (binocular parallax)
快门眼镜式立体显示器使用的两幅具有深度信息的图像是采用左右格式的图像.由于在实际串扰值的测量中,需要使左、右眼图像在不同灰阶之间的跳变,因此通过图像源系统上位机的控制,实现满足测量要求的初始灰阶值图像和目标灰阶值图像,并且立体显示器输出的测量图片均为纯色图案.举例,假如左眼通道显示图片的灰度是GLl,右眼图片的灰度是GLr.上位机将控制显示器的图像源板,输出符合测量要求的从(GLl,GLr)=(0,0)开始,并以指定的灰阶步长变化,以测量得到右眼通道逐步对应增加的图像亮度,直到(0,255).然后左眼灰度级会改变一步,灰色右眼的小数位设置为0,然后重新开始以前的更改方法.当(GLl,GLr)=(255,255)时,遍历双通道的所有灰度组合,测量结束.根据液晶显示器的显示原理,每一个单独的测量通道的图像亮度响应曲线,都是通过图2中系统测量探头获得.其中,两个带有模拟人眼视觉图层的光敏二极管设备可以同时工作,以最大程度模拟人员观看到的现场情况.
2 串扰消除的算法原理
该串扰消除的算法是基于从观看者的左右眼实际感知图像亮度的角度出发,在3D显示器上依次呈现左右眼相同灰阶的图像,并将通过图像开通通道测量得到的图像亮度值规定为输出的理想亮度值,同时结合亮度计测量得到3D显示器背光输出的特性曲线,经过结合得到观看者实际左眼和右眼不同图像灰阶值的查找表,并使用该灰阶查找表在液晶显示器显示3D图像时消除串扰[15-16].图5为该过驱动串扰消除方法的原理示意图,其中分别经过左眼和右眼的测量通道后得到亮度的二维矩阵,再经过优化处理后得到实际显示R、G、B所需的过驱动灰阶查找表.经过试验证明该查找表不仅仅可以用在时分式(快门眼镜式)立体显示器上,同样也可以运用在偏光式立体显示器上以显著降低串扰.

图5基于观看角度的过驱动串扰消除方法原理示意图Fig.5 Schematic diagram of over drive crosstalk elimination method based on viewing angle
3 串扰消除算法的实施过程
建立基于观看角度的过驱动查找表来降低串扰的核心在于,将重新计算得到的灰阶组合(GLlo,GLro)来代替原有显示立体图像的灰阶(GLl,GLr),通过补偿因为较慢的液晶相应曲线所导致的画面亮度的不均匀,最后可以使左右眼睛观察通道显示图像的亮度值与没有串扰时的比较理想的状态一致.当左右眼图像呈现灰阶一致的图像时,无串扰,因此针对左眼而言,当显示没有串扰的图像时应该采用重新设计的查找表中(GLl,GLl)对应的灰阶亮度.同理右眼图像无串扰时,应该对应新查找表中(GLr,GLr)的灰阶亮度.如图6所示,横、纵轴分别对应左、右眼图像的灰阶.图中标注的坐标点对应此时的左、右眼图像灰阶下各自测量的亮度值.例如,当坐标点(48,32)时,其两眼的理想亮度值应该是坐标为(48,48)的12.41 cd/m2和坐标为(32,32)时的5.84 cd/m2,但由于存在串扰,两眼测得的实际亮度值为:9.11 cd/m2和8.24 cd/m2.那么此时运用该新的查找表算法,将新的坐标点(82,12)上灰阶代替原来的灰阶组合,使得实测左、右眼图像亮度分别为12.12 cd/m2和5.57 cd/m2,左、右眼通道中亮度的分布更加靠近理想无串扰的状态,进而大幅降低串扰的影响,优化了立体图像的显示效果.

图6 优化灰阶组合示例Fig.6 Example of optimized gray scale combination
为了对新查找表中坐标(GLlo,GLro)的亮度与原目标输出亮度的接近范围进行量化,重新定义左、通道右眼图像亮度误差的公式如下:
ΔLum=|Luml(GLl0,GLr0)-Luml(GLl,GLl)|+
|Lumr(GLl0,GLr0)-Lumr(GLr,GLr)|,
(6)
其中Luml(GL1,GL2)表示左眼通道在(GL1,GL2)灰阶坐标时测量得到的亮度值,而对应Lumr(GL1,GL2)则表示右眼通道在(GL1,GL2) 灰阶坐标时测量得到的亮度值.假如计算得到的Lum值较大,说明两者的亮度差异较大,串扰就很明显,反之串扰就非常小.在研究中发现,其实Lum的计算公式可以有多种,例如可以仿照欧几里得空间(Euclidean Space)得到如下公式:
(7)
图7为抑制串扰的查找表算法工作示意图,当全部图像灰阶组合的(GLlo,GLro)表格值均采用新的查找表灰阶组合值替代后,则可以计算得到完整的串扰抑制查找表.
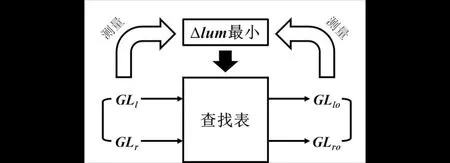
图7 抑制串扰的查找表算法工作示意图Fig.7 Schematic diagram of look up table algorithm for crosstalk suppression
4 串扰消除算法的效果分析
如图8(a)、(b)分别为某品牌立体显示器在不同的灰阶显示组合时,应用该串扰消除算法查找表前后,对左眼观察到的灰阶图像的实测亮度分析结果.通过对比可以看出,在没有应用串扰消除算法查找表工作时,通过左眼测量得到的亮度特性曲线,由于右眼的漏光等原因随右眼图像显示灰阶的不同,而随之产生了较大的差异;而当查找表工作后,各灰阶下的Gamma曲线趋向汇聚收束,这也表明左或右眼观察物体的通道互相不受影响,从而3D图像的串扰也被大幅降低,画质更加清晰并且观看的立体感更强.
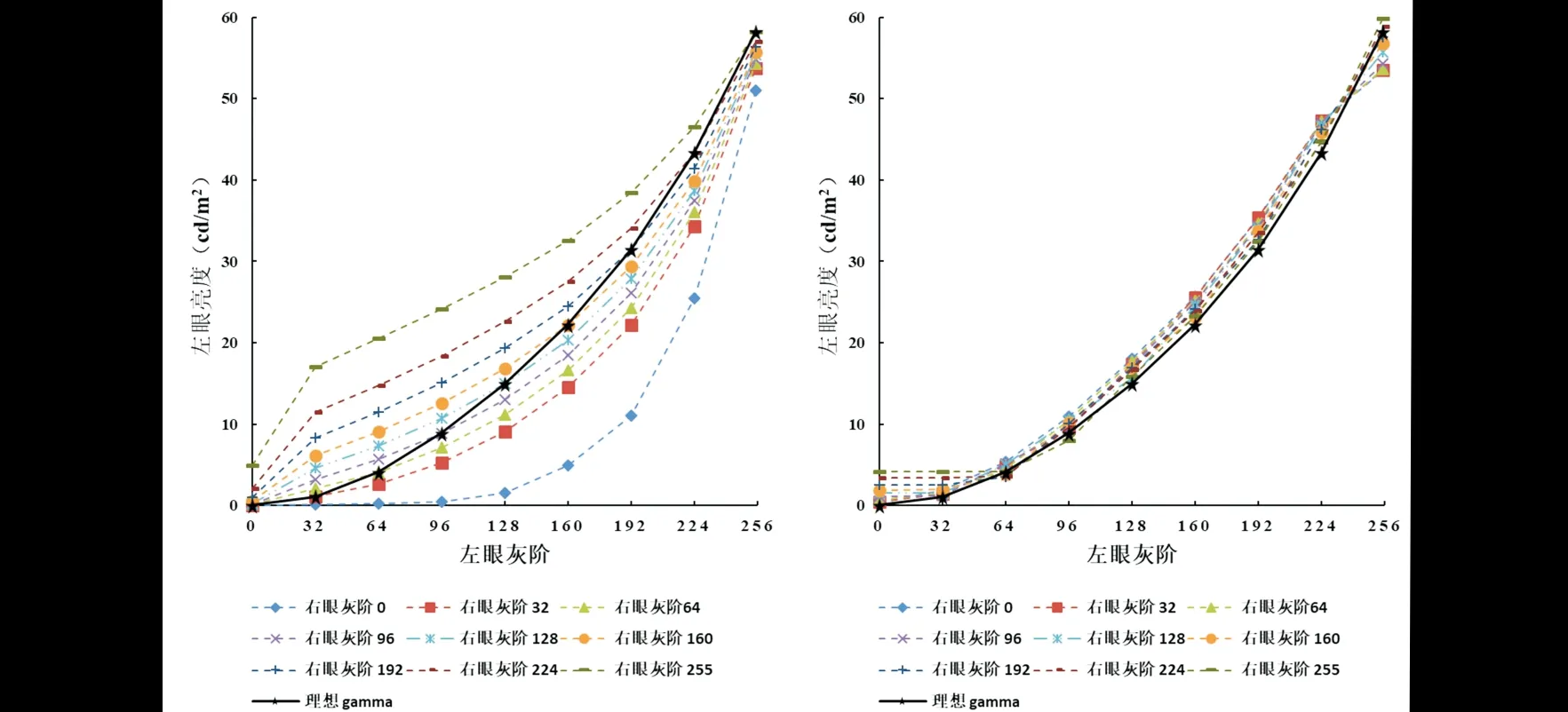
(a) 无查找表 (b) 有查找表图8 消除串扰的查找表运用前后对亮度值及gamma曲线的影响Fig.8 The influence of crosstalk elimination look-up table on brightness and gamma curve
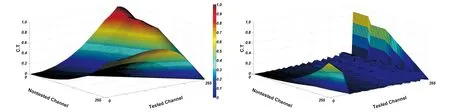
(a)原始串扰 (b)矫正后的串扰图9 归一化后的串扰值Fig.9 Normalized crosstalk data
同时,比较了串扰消除算法使用前后的效果,期间考虑了所有左右眼不同组合的灰阶图像,从图9中串扰矫正后的结果可以看出,在较为接近的中间灰阶组合图像的串扰几乎被全部消除了,但是在两侧边缘的灰阶部分,也就是高灰阶和低灰阶部分,串扰的消除效果不明显.通过计算,采用该减低3D图像串扰的查找表算法后,所有不同灰阶组合的平均串扰消除率可以达到大约70%,而当灰阶图像组合处于中间部分时,串扰的消除甚至高达90%以上.另外,本文提出的该算法,还充分利用了导致串扰产生的通道漏光,从而提高了3D显示图像的亮度达13%,同时使用该方法测量实际观看立体图像的视觉效果如图10和图11所示.

图10 未采用3D串扰消除算法透过眼镜的图像效果Fig.10 Image quality through glasses without using 3D crosstalk elimination algorithm

图11 采用3D串扰消除算法后透过眼镜的图像效果Fig.11 Image quality through glasses after using 3D crosstalk elimination algorithm
从上述的实际图像观察效果中也可以看出,采用这种新型的3D串扰消除算法对改善3D下的图像质量,消除串扰是有明显作用的.不过,目前这套算法的应用也只是处在一个初级阶段,因为其针对的3D处理对象包括实验效果的验证都是静态的3D图片,还没有在针对3D视频的特性,进行修正和串扰的实际验证,这还需要后期进行大量的算法优化和更新.
5 结语
本文对立体显示器串扰的定义和客观测量评价方法进行了研究,提出了一种基于查找表算法的立体显示串扰消除方法.分析结果表明,对于所有不同灰阶组合的平均串扰消除率可以达到大约70%,而当灰阶图像组合处于中间部分时,串扰的消除甚至高达90%以上.与此同时,不但将立体图像亮度提高了13%,并且在主观实验中观察到了明显串扰改善效果.此外,该算法的应用目前也是主要针对静态的3D图片,而对于3D视频串扰的改善还需要后期进行大量的研究工作.
猜你喜欢
电视技术(2022年9期)2022-10-08
航天返回与遥感(2022年4期)2022-09-03
中国现代医生(2022年20期)2022-08-22
家庭影院技术(2021年6期)2021-07-28
文萃报·周二版(2020年25期)2020-07-06
小小说大世界(2019年3期)2019-07-02
摄影之友(影像视觉)(2019年3期)2019-03-30
小天使·六年级语数英综合(2017年5期)2017-05-27
中外文摘(2015年24期)2015-11-23
微型计算机(2009年1期)2009-03-24
