
基于高程异常补偿的飞机终端区组合导航高度优化算法
2021-08-24 01:28孙淑光温启新
系统工程与电子技术 2021年9期
孙淑光,温启新
(中国民航大学电子信息与自动化学院,天津 300300)
0 引 言
近年来,我国不管是在军用航空领域还是民用航空领域,都取得了长足的发展与突破,各地中小型机场不断涌现,在这些机场起降飞机的数量也在迅速增长。但由于仪表着陆系统(instrument landing system,ILS)地面设施价格昂贵,其制导功能取决于地面设备辐射的空间信号,对安装场地的要求高[1],很多中小机场没有配备ILS,这不仅对飞行安全提出了挑战,还对空管安全保障和服务提出更高的要求[2]。全球导航卫星系统(global navigation satellite system,GNSS)具有定位精度高、服务范围广、受天气影响小等优点,不仅在航空领域发挥重要作用,还与无人化系统、现代通信技术等相互融合,不断向综合化、智能化发展,已成为国家基础设施建设与发展的核心部分[3-5]。ILS作为国际标准的飞机着陆引导系统在二战末期就已投入使用[6],随着导航技术的发展,为了增加航空器航路设计的多样性,提高其在机场终端区域进近路线的灵活性,降低机场着陆引导系统建设成本,国际民航组织(international civil aviation organization,ICAO)已计划用GNSS来代替ILS完成对航空器的着陆引导[7]。如今北斗导航系统(beidou navigation system,BDS)建设完成并正式开通,这不仅具有极其重要的军事战略意义,也为建立新的机场着陆引导系统、研究与发展自主导航性能增强系统等方面提供良好条件[8]。
目前,飞机高度测量主要利用机载大气数据系统设备,大气数据系统容易受静压误差影响而导致高度测量精度降低。当飞机所处飞行阶段变化时,其飞行气压高度参考基准面也会发生变化。当飞机处于巡航阶段时,飞行高度的参考基准面为国际标准气压海平面(101.325 kPa),而当飞机进入机场管制区域时,飞行高度的参考基准面为修正海平面,不同时间、不同机场区域的修正海平面大气压不同。
BDS定位所选取的参考体为CGCS2000参考椭球体[9],其高度基准面与似大地水准面存在差异,该差异被称为高程异常,ADS测量高度基准面与似大地水准面重合,不同终端区的高程异常不同。由于目前空管运行主要以气压基准为依据[10],因此使用BDS接收机测量的高度进行着陆引导时,需要与ADS测量的高度进行组合,消除高程异常的影响。另外,BDS信号在传播过程中,对流层误差、电离层误差[11-12]以及多径误差[13]都会影响北斗接收机的定位精度,单独的BDS接收机高度信息无法满足民用飞机进近所需导航性能的要求[14]。
捷联式惯性导航系统(strapdown inertial navigation system,SINS)是一种以牛顿力学为基础,不依赖于外部信号,根据惯性元件进行全自主式导航的系统,可用于航空器、导弹、车辆以及船舰等多种载体[15]。但其定位误差随着时间的积累会逐步增加,高度测量误差随时间呈发散状态[16],在无其他高度测量手段辅助情况下,高度输出无法满足飞机高度定位的精度要求。
GNSS与SINS组合导航技术的研究开始于20世纪60年代,根据选取组合系统状态量的不同,系统组合类型可划分为:松组合、紧组合和超紧组合[17-18]。针对以上组合方式及特点的不同,国外学者从上世纪开始就进行了研究并应用于制导武器中。在组合过程中,通过Kalman滤波算法,将GNSS的导航信息与SINS的导航信息进行数据融合,利用组合导航系统输出信息对SINS进行误差补偿,从而使系统保持良好的定位精度,确保载体安全运行。其衍生出来的方法还有扩展Kalman滤波、无迹Kalman滤波、粒子滤波等[19-20],目前已在系统状态预测、目标跟踪、故障诊断、卫星导航等多个领域进行应用[21-22]。在高度定位方面,现有的GNSS/SINS组合导航算法未考虑飞机的特定飞行环境与飞行阶段,并未将GNSS定位高度与特定地区的高程异常相结合,使其在实际应用中存在一定误差。国内外针对不同区域,一般采用GNSS与地形辅助导航系统相结合来提高定位精度[23]。但在某些特定地区(如山地、丘陵等),对起伏的地表、复杂的地形进行建模时,其拟合复杂程度要远大于对其高程异常分布的拟合建模,故本文提出一种基于机场终端区高程异常补偿的组合导航算法来提高高度定位精度。
针对3种导航方式的特点及其高度基准的差异问题,本文在对单一导航方式高度测量误差模型建模及误差特点分析的基础上,结合机场所在区域的高程异常模型,通过Kalman滤波方式将3种不同导航方式进行组合,建立组合导航模型并进行仿真,验证本算法高度优化效果。相比于传统组合导航算法,本文的主要创新点在于通过对没有配备ILS的机场终端区高程异常建模,对BDS测量高度进行高程异常补偿,并将补偿后的BDS与ADS、SINS通过Kalman滤波算法进行组合导航,提高飞机在终端区起降以及进近时的垂直导航精度。通过计算机仿真结果可以看出,该方法在提高飞机垂直导航精度的同时,也解决了在ADS受到静压源误差干扰时,导致系统高度定位精度降低的问题。
1 ADS高度测量及高程异常拟合
1.1 ADS气压高度测量误差模型
ADS以大气数据计算机为核心,利用安装在航空器表面的传感器,探测航空器周围大气的静压参数,通过气压高度方程解算出航空器所在位置的气压高度[24-25]。ADS计算标准气压高度方程如下:
(1)
式中:Ph为航空器所在气压高度的大气静压值;Pb为国际标准大气条件下,所选气压高度基准面的大气静压值;Hb为气压高度基准面处的重力势高度值;g为标准重力加速度值;Tb气压高度基准面处的大气温度值;L为航空器所在气压高度层的气体温度垂直变化梯度值;R为理想状态下航空器周围大气气体常数。
由式(1)可知,气压基准面选定后,气压高度HP是飞机所在处大气静压Ph的单值函数,大气静压误差是气压高度误差的主要来源。大气静压误差一般分为仪表误差和静压源误差。针对不同飞机机型的仪表误差,ADS有不同的误差补偿办法来降低该部分误差。静压源误差与静压孔位置、突风、飞行马赫数、飞行迎角等有关,飞机在大气层内做机动飞行或者迎角发生变化时,静压传感器探测到的大气静压Ps就会出现一定的偏差ΔPs。ADS静压测量误差Wp包括静压偏差ΔPs和传感器测量噪声wp两部分,表示为
Wp=ΔPs+wp
(2)
1.2 机场终端区高程异常模型及拟合算法
针对机场终端区所在的不同地域,高程异常拟合模型可分为:多项式曲线拟合模型[26]、多项式曲面拟合模型、多面函数拟合模型、BP神经网络拟合模型等。为确保拟合精度,本文采用多面函数拟合法进行机场区域高程异常补偿。多面函数拟合法由美国Hardy教授提出,利用多个简单的曲面经过叠加后形成一个连续且光滑的曲面,利用该曲面上的点所对应的高程异常来模拟机场区域的高程异常分布,最终达到逼近实际曲面的拟合效果[27]。
假设机场区域实际高程异常分布为曲面函数f(x,y),其逼近函数为φ(x,y),则根据拟合要求:
(3)
φ(x,y)可以描述为
(4)
式中:Qj(·)为基础叠加曲面的数学表达式(核函数);a为待求核函数权重系数;j为所选核函数个数,取值范围为1到m;(xi,yi)为高程异常实际测量点的坐标,i表示实际测量点的个数;(xj,yj)为核函数中心的经纬度坐标。
本文选取正双曲函数作为核函数:
(5)
式中:δ为用来调节核函数形状的核函数光滑因子。设有n组高程异常实测值(xi,yi),i=1,2,…,n,对应的高程异常值为ξi,i=1,2,…,n。则每一个实测点的误差方程为
(6)
用矩阵形式表示为
(7)
根据最小二乘法计算求得核函数权重系数矩阵A=(QTQ)-1QTξ,将所求得的核函数权重系数带入到表达式φ(x,y)中,就可得到机场区域实际高程异常分布的逼近拟合函数。最后利用飞机接收的GNSS导航信息,解算出飞机所在机场终端区域的经纬度,将此位置信息带入到机场终端区高程异常拟合函数中,即可得到飞机具体飞行位置对应的高程异常值。
2 ADS/SINS/BDS组合导航模型
2.1 组合导航整体架构
ADS/SINS/BDS组合导航系统整体架构如图1所示,包括ADS模块、SINS模块、BDS模块、高程系统模块和卡尔曼滤波模块。其中BDS解算出的高度信息与高程异常模块提供的机场区域高程异常信息相结合,构成新的高度信息,也即相对于机场场面的高度信息。卡尔曼滤波模块将BDS输出的位置信息,ADS模块输出的气压高度信息,SINS模块解算出的位置、速度信息进行数据融合,即可输出高度的最优滤波估计值。通过图1可以看出,本文所提出的高程异常补偿算法主要是对BDS测量高度进行补偿。当飞机进入机场终端区时,其飞行高度参考基准面为当地的修正海平面,该基准面为ADS测量气压高度的参考基准面。而BDS测量高度的参考基准面为CGCS2000国家大地坐标系参考椭球面。两个系统测量高度的参考基准面在不同位置具有一定的数值差异。为统一不同导航系统的测高参考基准面,提高定位精度,需对这部分差异进行补偿。其具体步骤为:① 当飞机进入机场终端区时,通过输入接收BDS定位的经纬度信息,根据所建立的机场终端区高程异常分布模型,可计算出飞机所在位置的高程异常值。② 将飞机所在位置的高程异常值对BDS测量的对应位置高度信息进行补偿计算,从而使BDS测高参考基准面与ADS测高参考基准面统一。③ 将不同导航系统通过卡尔曼滤波进行组合导航,提高系统定位精度。
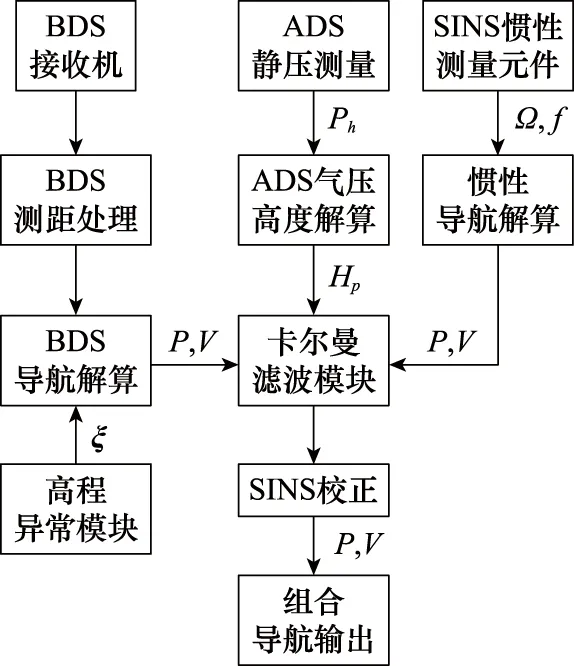
图1 组合导航系统架构图Fig.1 Architecture diagram of integrated navigation system
2.2 状态方程的建立
在ADS/SINS/BDS松组合滤波模型中,采用位置、速度组合方式,选取SINS的误差参数作为滤波的状态变量。SINS误差包括:大地坐标系下的经度误差,纬度误差与高度误差,站心坐标系坐标系下的速度误差、载体坐标系下的姿态角误差、惯性元件误差。组合导航系统状态方程为

(8)
式中:X为系统状态矢量矩阵,具体表示为
X=[X1,X2,X3,X4]T
(9)
(10)
(11)
W为系统过程噪声矩阵,表达式为
W=[wbx,wby,wbz,wax,way,waz]T
(12)
式中:wbx,wby,wbz为机体坐标系下的陀螺仪随机噪声;wax,way,waz为机体坐标系下的加速度计随机噪声。系统状态转移矩阵F可由SINS误差微分方程推导得出[28]。
2.3 基于影响因子β的量测方程的建立
文章假设飞机的真实位置为L、λ、h,真实速度为ve、vn、vu,则SINS解算的位置信息和速度信息可分别表示为
(13)
(14)
式中:δLI,δλΙ,δhI为SINS位置测量误差;δvIe,δvIn,δvIu为SINS东北天坐标系下速度测量误差。BDS解算的位置信息和速度信息分别表示为
(15)
(16)
式中:δLB,δλB,δhB为BDS位置测量误差;δvBe,δvBn,δvBu为BDS速度测量误差。
ADS解算的高度信息可表示为
hA=h+δhA
(17)
式中:δhA为ADS气压高度测量误差。
当飞机进入机场管制区域时,飞行员会根据地面播报的当地修正海压,对ADS的气压基准进行修正。此时,如果ADS高度测量准确(静压源误差较小),可利用ADS和SINS的高程差进行高度的滤波修正。但如果ADS气压高度受静压源误差影响较大,则会对高度导航精度产生影响。而BDS不受天气因素影响,故在飞机静压源误差增大时,将Kalman滤波的高度量测方程转换为BDS测量高度hB与SINS测量高度hI之差。因此,量测方程中高度误差方程表示为
Δh=β(hI-hB)+(1-β)(hI-hA)
(18)
式中:β为ADS误差判断因子。
根据文献[29]仿真结果,当飞行迎角在-5°~0°范围内时,ADS的静压源误差影响可忽略不计,此时,β值设为0;当迎角不在该范围内时,ADS高度受静压源误差影响较大,β值由0变为1,ADS模块输出的气压高度值将不再参与系统量测值计算。Kalman滤波系统量测方程表示为
(19)
量测噪声转移矩阵为
(20)
量测噪声矩阵为
(21)
式中:Rm为地球子午圈半径;Rn为卯酉圈半径。
2.4 ADS/SINS/BDS组合导航Kalman滤波实现
组合导航的状态方程和量测方程经离散化后可写成如下形式:
(22)
式中:Φk,k-1表示离散化后的系统状态一步转移矩阵;Γk-1表示离散系统噪声分配矩阵;Wk-1表示系统噪声矩阵;Hk表示离散系统量测转移矩阵;Vk表示量测噪声矩阵。
Kalman滤波算法主要包括下5个步骤。
步骤 1系统状态一步预测方程:
(23)
步骤 2系统状态估值计算方程:
(24)
步骤 3Kalman滤波增益计算方程:
(25)
步骤 4系统一步预测均方误差矩阵计算:
(26)
步骤 5系统估计均方误差矩阵计算:
Pk=(I-KkHk)Pk,k-1
(27)

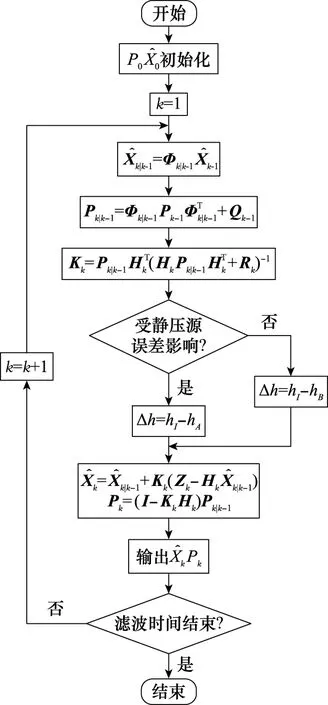
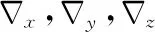
图2 Kalman滤波流程图Fig.2 Flow chart of Kalman filtering
ADS测量误差增大情况下,为有效提高高度导航精度,BDS/SINS高度信息融合前,首先通过高程异常补偿对BDS接收机所测得机场附近区域高度进行优化补偿,调整高度基准,确保飞机真实离地高度与导航系统提供高度的一致性及准确性。图2中初始点为0时刻对状态估计协方差矩阵P0与选取的系统状态量X0的初始化。整个算法流程中的关键拐点为通过判断系统是否受静压源误差影响后,确定Δh值的具体计算方法。
3 组合高度解算仿真与结果分析
3.1 仿真模块设置
为验证高程异常补偿下的ADS/SINS/BDS组合导航算法的有效性和可行性,本文利用机场附近区域的数据进行了仿真。仿真模块包括:航迹生成模块,ADS仿真模块,SINS仿真模块,BDS仿真模块,Kalman滤波模块和高程异常模块。航迹模块能够模拟飞机起飞、爬升、平飞、转弯、俯冲等飞行状态,并且能够给出飞机飞行位置、速度、加速度、姿态角等飞行参数,ADS仿真模块提供相应的气压高度信息,SINS模块提供捷联式惯性导系统解算的位置,速度信息,BDS模块提供北斗系统解算的位置信息,高程异常模块给出飞机所在机场附近的高程异常值,Kalman滤波模块对导航信息进行数据融合,输出组合导航信息,仿真流程如图3所示。
图3 系统组合导航流程图Fig.3 Flow chart of system integrated navigation
3.2 仿真结果与分析
进近中的飞机三维航迹如图4所示,初始经度为东经115°,初始纬度为北纬22°。仿真条件设置如表1所示,N(a,b)表示均值为a,方差为b的高斯白噪声。
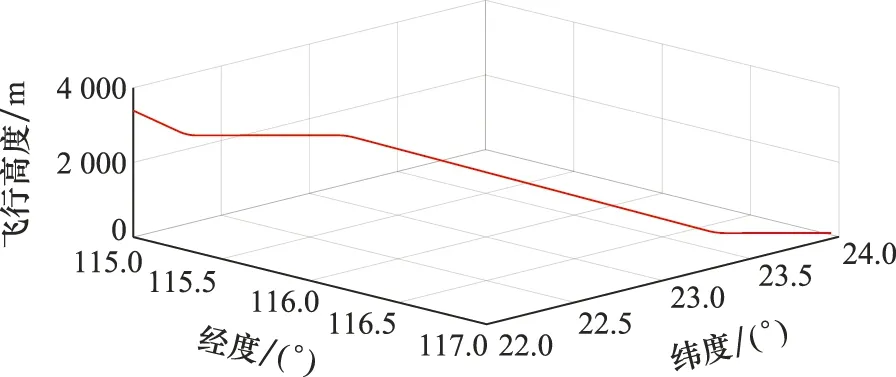
图4 三维飞行航迹图Fig.4 Three dimensional flight path diagram
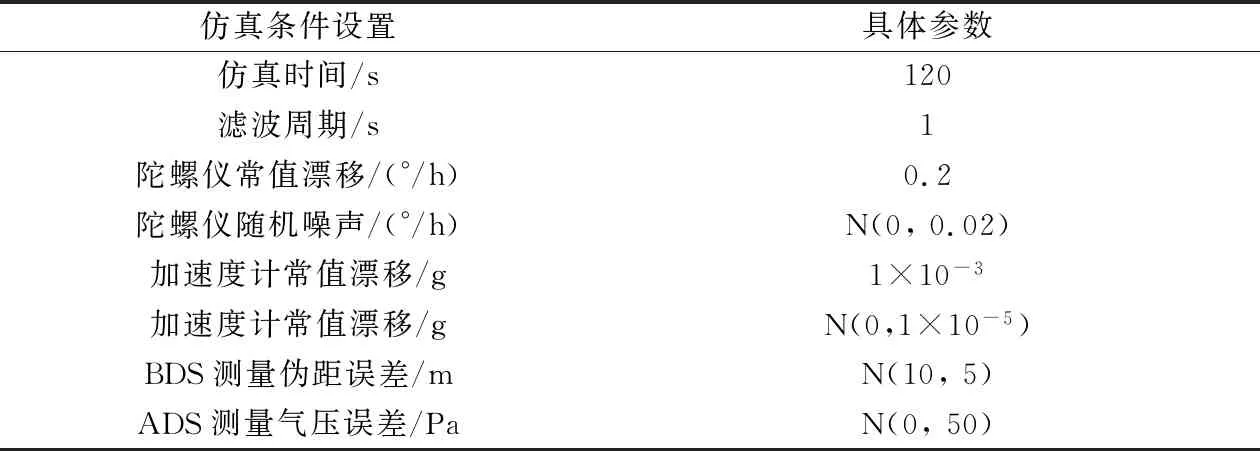
表1 仿真条件及参数设置Table 1 Simulation conditions and parameter settings
高程异常曲面拟合采用多面函数拟合法,核函数平滑因子为0,可表示为
(28)
(29)
(30)
(31)
选取的高程异常实际测量位置为:(21°/E,113°/N),(22°/E,117°/N),(25°/E,116°/N)。考虑测量误差,高程异常值测量值中加入标准正态分布的高斯白噪声,其拟合结果如图5所示。
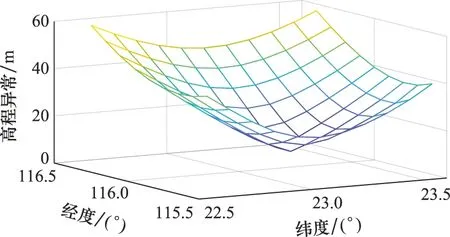
图5 机场终端区的高程异常曲面拟合Fig.5 Height anomaly fitting map of airport terminal area
在本文仿真条件下,ADS,SINS,BDS高度测量误差曲线如图6所示。

图6 单一导航系统高度测量误差曲线图Fig.6 Height measurement error curve of single navigation system
由图6可以看出,在仿真时间内,SINS高度测量误差随时间由0 m增长至70.82 m,误差随时间的积累而增加。未受静压源误差影响条件下,ADS高度测量误差范围为-12.94~10.55 m,BDS高度定位误差范围为11.22~49.05 m。
图6中的BDS测量高度受终端区高程异常影响。对终端区高程异常补偿之后,BDS高度定位误差曲线图如图7所示。
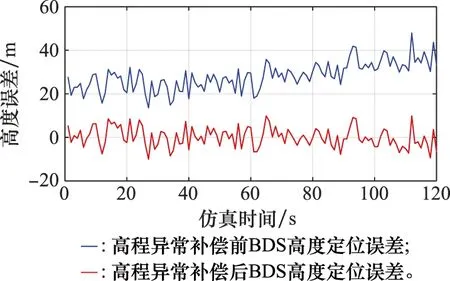
图7 高程异常补偿前后BDS高度定位误差曲线图Fig.7 BDS height positioning error curve before and after height anomaly compensation
由图7可知,补偿终端区高程异常前,BDS高度定位误差范围为11.22~49.05 m。补偿终端区高程异常后BDS高度定位误差范围为-17.55~13.93 m。在仿真条件下,通过终端区高程异常补偿,BDS接收机测量的对地高度误差减少33.16%。
在仿真时间80~100 s之间加入静压源误差Wp,其中静压源偏差ΔPs为300 Pa,传感器测量噪声wp是均值为0,方差为10的高斯白噪声。此时的Kalman滤波仿真波形如图8所示。

图8 静压源误差影响的Kalman滤波高度误差图Fig.8 Kalman filter height error diagram affected by static pressure source error
由图8可知,存在静压源误差时,ADS高度定位误差范围为-18.02~39.05 m。根据本文算法,当ADS检测到有较大的静压误差影响时(攻角不在-5°~0°范围内),系统量测方程中的高度分量将由SINS测量高度与补偿终端区高程异常后的BDS测量高度的差值作为量测值。由图8中可以看出,改变高度量测的组合信息后,使得系统在静压源误差影响阶段的高度定位误差减少了41.52%,降低了静压源误差所造成的影响。
图9为组合导航系统在东北天坐标系下的位置误差。将改进的Kalman滤波、传统Kalman滤波与SINS东北天方向的定位误差作对比。
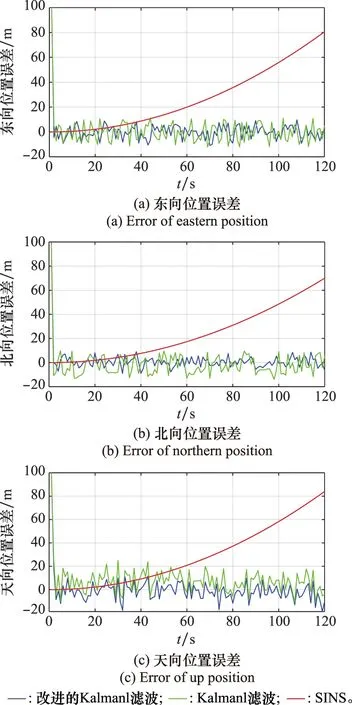
图9 组合导航位置误差Fig.9 Position error of integrated navigation
从图9中可以看出,SINS在东北天方向的定位误差都存在不同程度的发散。改进的Kalman滤波算法与传统的Kalman滤波算法相比,其改进之处主要体现在天向定位误差方面。在天向位置,SINS定位误差范围为0~83.25 m,改进的Kalman滤波算法定位误差范围为为-19.75~11.37 m,传统Kalman滤波算法定位误差范围为-15.86~24.63 m。通过对机场终端区高程异常的补偿,可在原有的Kalman滤波算法的基础上进一步缩小高度定位误差波动范围,提高高度的定位精度。改进后的Kalman滤波算法在提高高度定位精度的同时,仍可起到抑制SINS的定位误差发散的效果,保证系统有良好的滤波输出。
4 结 论
本文针对无ILS引导的机场终端区,利用Kalman滤波算法对ADS/SINS/BDS测量数据进行优化融合,提高了飞机高度测量精度。针对飞机进近阶段受到静压源误差影响高度测量变差的情况,利用机场终端区高程异常补偿算法,将ADS所测高度转变为不受静压源误差影响的BDS测量高度,确保了飞机离地高度测量的准确度。通过仿真可以看出,本文所改进Kalman滤波算法可以有效抑制SINS测量误差随时间增加而发散的情况,且在飞机受到静压源误差干扰时,通过高程异常补偿,有效提高了飞机飞行高度的定位精度,增强了飞机进近阶段的安全性,为无ILS终端区飞机进近的高度解算优化算法提供了参考。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
建材发展导向(2021年15期)2021-11-05
科技创新与应用(2021年24期)2021-09-08
当代陕西(2020年23期)2021-01-07
岩土工程技术(2019年6期)2020-01-06
消费导刊(2019年12期)2019-08-21
制造技术与机床(2018年8期)2018-10-09
制造技术与机床(2018年9期)2018-09-19
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
