
磁流变减振器的可控特性标定方法研究
2021-09-06 02:03白先旭邓学才
合肥工业大学学报(自然科学版) 2021年8期
白先旭, 邓学才, 沈 升
(合肥工业大学 汽车与交通工程学院,安徽 合肥 230009)
自1948年Rabinow发现磁流变效应[1]以来,基于磁流变液的半主动执行器在建筑结构[2-3]、医疗器械[4-5]、汽车制动与离合系统[6-7]以及汽车悬架系统[8-11]等多个领域得到广泛的研究与应用。磁流变执行器能够应用于振动与冲击控制系统的前提是具有满足需求的可控特性,包括力学响应特性[12]和时间响应特性[13]。
磁流变减振器是磁流变液的一种典型应用。针对磁流变减振器的力学特性,文献[14]通过仿真和实验,分析了磁流变减振器在冲击激励条件下的动态力学响应特性;文献[15-16]从磁流变减振器结构设计入手,提出了一种双杆式具有内流通道的磁流变减振器,并从可控阻尼力范围、动态范围和可控运行速度范围等多个方面对其可控力学响应特性进行了分析与说明;文献[17]实验测试并评价了双杆式和含补偿气囊的单杆式磁流变减振器在不同冲击速度条件下的力学响应特性;文献[18]设计了一款输出较大可控阻尼力范围的多级蜿蜒磁路式磁流变阻尼器,并对其力学属性进行了仿真分析。
力学响应特性作为磁流变减振器输出特性的直观反映,对于其可控特性的研究至关重要,但响应时间作为任何控制执行系统必不可少的影响因素,对于磁流变减振器的可控特性也影响巨大。因此很多学者对磁流变减振器的时间响应特性进行了研究。文献[19]对冲击用磁流变减振器的时间响应特性进行了理论建模和实验分析;文献[20]实验测试分析了不同激励速度和励磁电流条件下磁流变减振器的响应时间;文献[21]对基于磁流变减振器的半主动控制系统的时间响应特性进行了研究;由于磁流变系统的固有磁滞特性,文献[13]和文献[22]对磁流变半主动减振响应进行了补偿控制研究。
根据以上分析,现有研究结果基本是从磁流变减振器的力学响应特性或时间响应特性单一方面对减振器的可控特性进行研究,而结合力学响应特性和时间响应特性两方面对磁流变减振器的可控特性进行研究的文献较少。
为全面评价磁流变执行器的可控特性,本文以双杆式磁流变减振器为研究对象,建立评价磁流变减振器的标定方法,搭建磁流变减振器可控特性的实验标定平台,从力学响应特性(包括可控阻尼力范围、动态范围和可控运行速度范围)和时间响应特性两方面进行磁流变减振器标定。基于鹭宫伺服液压激振平台和落锤冲击测试系统,标定磁流变减振器在不同速度激励条件下的可控阻尼力范围、动态范围和可控运行速度范围;对磁流变减振器及其控制执行系统的响应时间进行重新定义,基于该定义介绍一种对响应时间的标定方法,从磁流变减振器控制执行系统的响应时间与该系统各子单元的响应时间对时间响应特性进行说明,并根据实验结果对该标定方法进行验证说明。
1 标定方法
1.1 力学响应特性
磁流变减振器的可控力学响应特性主要包括可控阻尼力范围、动态范围和可控运行速度范围。可控阻尼力范围是指在不同速度激励条件下,磁流变减振器的被动阻尼力与施加励磁电流时最大阻尼力之间的范围。
不同励磁电流时磁流变减振器阻尼力与速度关系示意图如图1所示。

图1 不同励磁电流时磁流变减振器阻尼力与速度关系示意图
从图1可以看出,当激励速度在0~v0之间变化时,不施加励磁电流时磁流变减振器的阻尼力变化范围为F01~F1,施加最大励磁电流时磁流变减振器的阻尼力变化范围为F02~F2,则磁流变减振的可控阻尼力范围为F1~F2。
动态范围为在相同速度激励条件下,施加励磁电流后最大阻尼力与对应被动阻尼力的比值。如图1所示,激励速度为v0时,施加最大励磁电流时的阻尼力F2与不施加励磁电流时的被动阻尼力F1的比值F2/F1即为磁流变减振器在相同激励速度v0时的动态范围。
可控运行速度范围的定义为通过调节励磁电流实现磁流变减振器特定阻尼力时,磁流变减振器可以运行的速度范围[12]。如图1所示,调节励磁电流使磁流变减振器的阻尼力大小保持在F1,则磁流变减振器可运行的速度范围0~v0即为其可控运行速度范围。
1.2 时间响应特性
1.2.1 定义
磁流变减振器控制执行系统的响应时间应是控制执行系统中各子单元的响应时间之和,包括反馈传感器、控制器、可控电流源、执行器等。各子单元的响应时间即上一单元的信号输入给下一单元时起至下一单元达到期望信号时所经历的时间。
实际中,控制执行系统的各个子单元的响应时间应是包括单元的反应时间和上升时间2个部分,反应时间指在接收到上一单元的信号时单元需要一段时间进行信号处理识别直到做出反应,而上升时间为单元反应时间结束后单元开始响应至达到期望信号时所经历的时间。需要注意的是,在控制执行系统中信号流后端子单元的上升时间积累了前端所有子单元的上升时间。
控制执行系统和控制执行系统各子单元的响应时间可以总结为:
(1)
(2)
其中:ttotal为控制执行系统的响应时间;trj为控制执行系统中各单元的响应时间;j=0,1,2,…,n为控制执行系统中信号流方向上各单元(本文中n=3,j=0、j=1、j=2、j=3分别为位移传感器、控制器、可控电流源、磁流变减振器);taj、trisej分别为控制执行系统中各单元的反应时间和上升时间。本文中,上升时间trisej定义为输出信号从反应时间taj结束时开始到达到最大稳定值的63.2%所用的时间[16]。
1.2.2 标定方法
基于响应时间测试系统与重新定义的响应时间概念,本文提出一种磁流变减振器控制执行系统的响应时间标定方法,相应的标定过程如图2所示。

图2 磁流变减振器控制执行系统响应时间标定过程
当控制器的控制信号由0开始发生突变的时刻记为tA,发生突变后控制信号持续增大达到最大稳定值ξ倍(ξ的取值包括63.2%、86.5%、95.0%、98.0%)的时刻记为tD,则控制信号由tA时刻开始到tD时刻所经历的时间即为控制器控制信号的上升时间trise1,记为trise1=tD-tA。

整个磁流变减振器控制执行系统及各子单元响应时间标定结果如图3所示。

图3 磁流变减振器控制执行系统响应特性
2 实验测试系统
2.1 力学响应特性测试系统
磁流变减振器的力学响应特性测试包括激励速度较低的正弦位移激励和激励速度较高的冲击激励。磁流变减振器原型在鹭宫伺服液压激振测试系统上进行正弦位移激励的实验系统和在冲击测试平台进行冲击实验的实验系统如图4所示。图4a所示的实验测试系统可用于测试不同正弦位移激励、不同励磁电流条件下磁流变减振器的可控力学特性。图4b所示的实验系统可用于测试磁流变减振器在不同冲击激励速度条件下的可控力学特性。
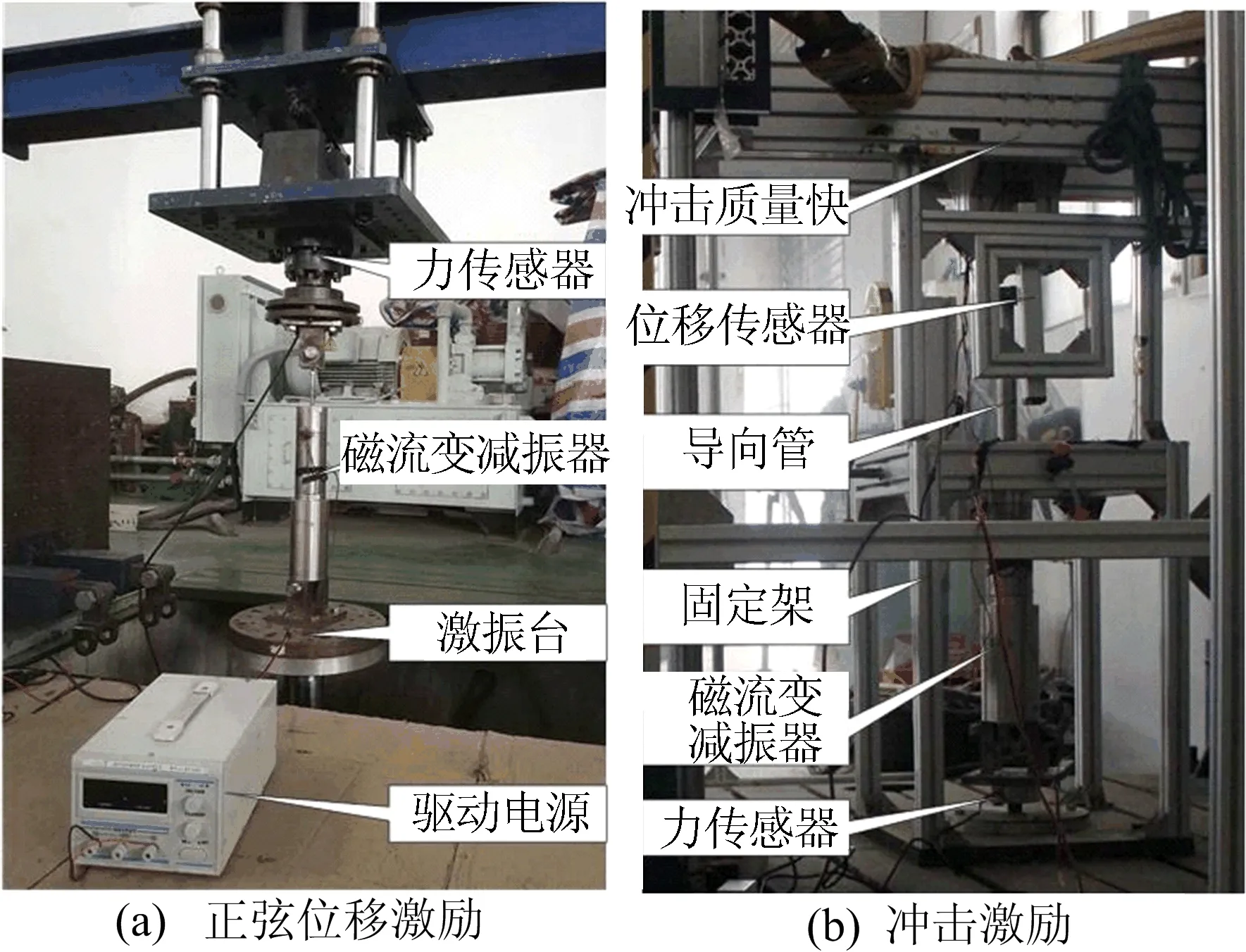
图4 磁流变减振器实验测试系统
2.2 时间响应特性测试系统
磁流变减振器时间响应特性测试系统的实验系统与原理示意图[16]如图5所示。

图5 响应时间测试系统
鹭宫伺服液压激振台对磁流变减振器施加三角波位移激励,位移传感器测量磁流变减振器的位移信号并发送给控制器。控制器输出控制信号给可控电流源,控制输出励磁电流给磁流变减振器。采集磁流变减振器的阻尼力信号和位移信号、控制器的控制信号和可控电流源的输出励磁电流。
3 可控特性标定分析
3.1 可控力学特性
基于鹭宫伺服液压激振测试系统和冲击测试平台,实验测试与标定研究了磁流变减振器在正弦位移激励和高速冲击激励条件下的可控力学性能。首先在幅值为30 mm、频率分别为1.50 Hz和2.75 Hz的正弦激励条件下,测试了磁流变减振器在激励电流0~1.8 A时的力学特性,实验测试结果分别如图6、图7所示。
从图6a、图7a可以看出,当励磁电流从0增加到1.8 A时(间隔0.6 A),磁流变减振器的可控阻尼力不断增加,在最大位移处,激励速度改变方向,阻尼力方向也相应改变。
从图6b、图7b可以看出,磁流变减振器的激励速度从约0.3 m/s增加到0.5 m/s,其被动阻尼力增加值变化较小,而相同工况下,在施加电流后磁流变减振器的阻尼力增长幅度较大,因此励磁电流的大小对磁流变减振器的可控阻尼力大小影响较大。

图6 磁流变减振器在1.5 Hz正弦位移激励下的阻尼力
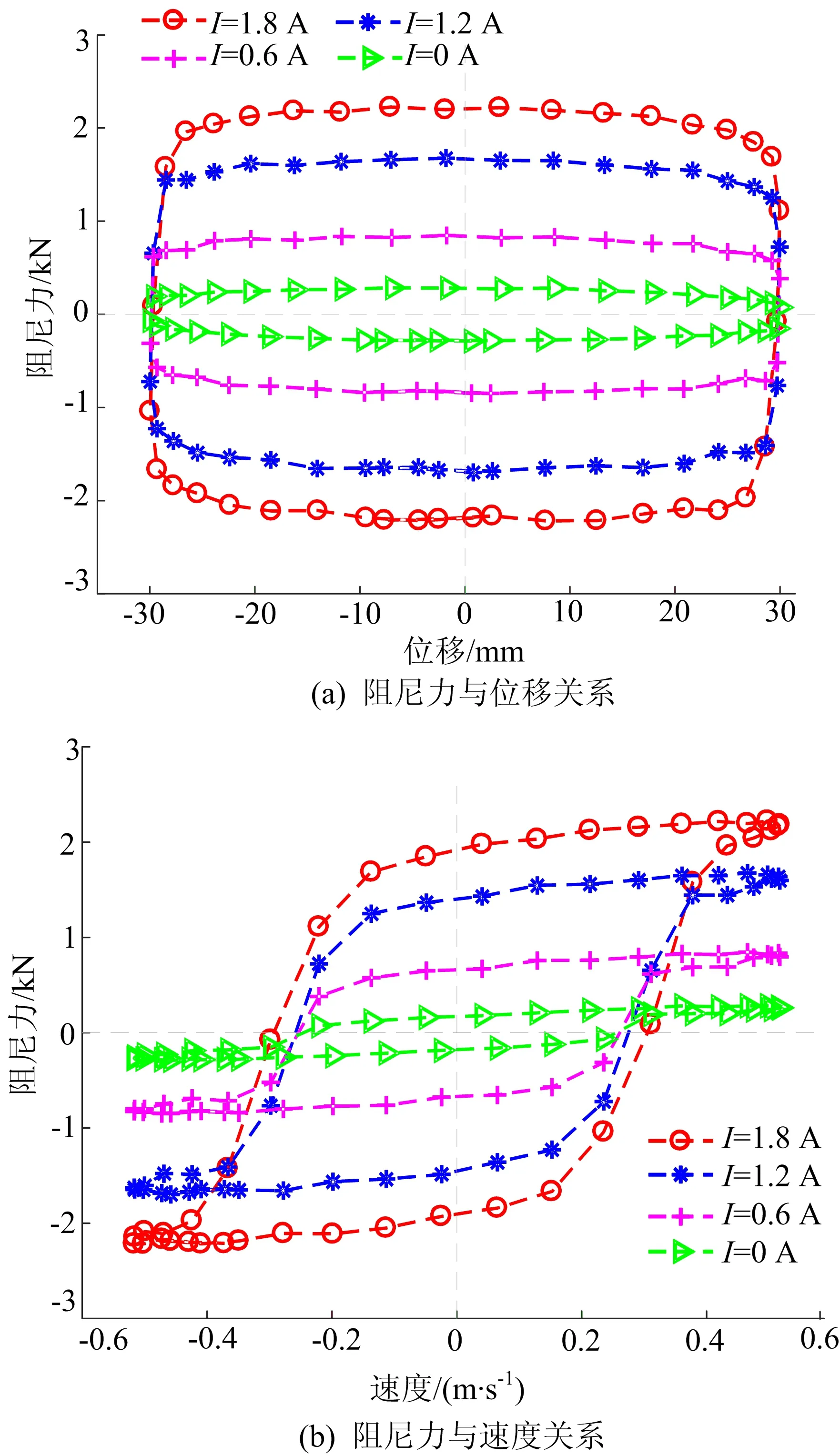
图7 磁流变减振器在2.75 Hz正弦位移激励下的阻尼力
在不同的初始冲击速度条件下,改变施加在磁流变减振器线圈上的励磁电流,测试磁流变减振器在冲击激励条件下的可控力学特性。磁流变减振器的可控阻尼力范围、动态范围和可控运行速度范围标定结果如图8所示。
从图8a可以看出,在高速冲击的激励条件下,磁流变减振器的阻尼力随着速度的增加而增加。


图8 磁流变减振器在冲击激励下的力学特性
在冲击速度由0增加到2 m/s时,在不加励磁电流的条件下磁流变减振器的阻尼力由0增加到2.41 kN,而在施加1.8 A励磁电流的条件下磁流变减振器的阻尼力由2.73 kN增加到4.98 kN。根据可控阻尼力范围的定义,当冲击速度范围为0~2 m/s,励磁电流从0 A增加到1.8 A时,磁流变减振器的可控阻尼力范围实际上约为2.41~4.98 kN。
由图8b可知,在冲击激励速度为2 m/s,励磁电流为1.8 A时,磁流变减振器的动态范围为2.07。
如图8a所示,在保证恒定阻尼力大小分别为1、2、3 kN条件下,对应的磁流变减振器可以运行的速度区间见表1所列。
从表1可以看出,阻尼力为1、2、3 kN时相应的磁流变减振器的可控运行速度范围为1.06 、1.70、1.95 m/s,与图8c结果一致。

表1 不同阻尼力条件下的可控运行速度范围
3.2 响应时间
将磁流变减振器固定于鹭宫伺服液压激振台,并施加频率为0.50 Hz、振幅为25 mm的三角波位移激励。控制器根据位移传感器的位移反馈输出控制信号给可控电流源,进而实现对磁流变减振器的控制。
给磁流变减振器施加1.2 A瞬态励磁电流时的阻尼力时间历程如图9所示,包括位移传感器的位移信号、控制器输出的控制信号、可控电流源输出给磁流变减振器的励磁电流以及磁流变减振器的阻尼力信号。
结合图2所示的磁流变减振器控制执行系统响应时间标定过程和图9所示的实验结果,控制器输出的控制信号由0开始发生突变的时刻tA=712.9 ms,当控制信号继续增加达到稳定值的63.2%的时刻tD=721.3 ms,则控制信号的上升时间trise1=tD-tA=8.4 ms。因为控制器为该控制执行系统的初始单元,其反应时间ta1=0,所以控制信号的上升时间即为控制单元的响应时间,即tr1=trise1=8.4 ms。
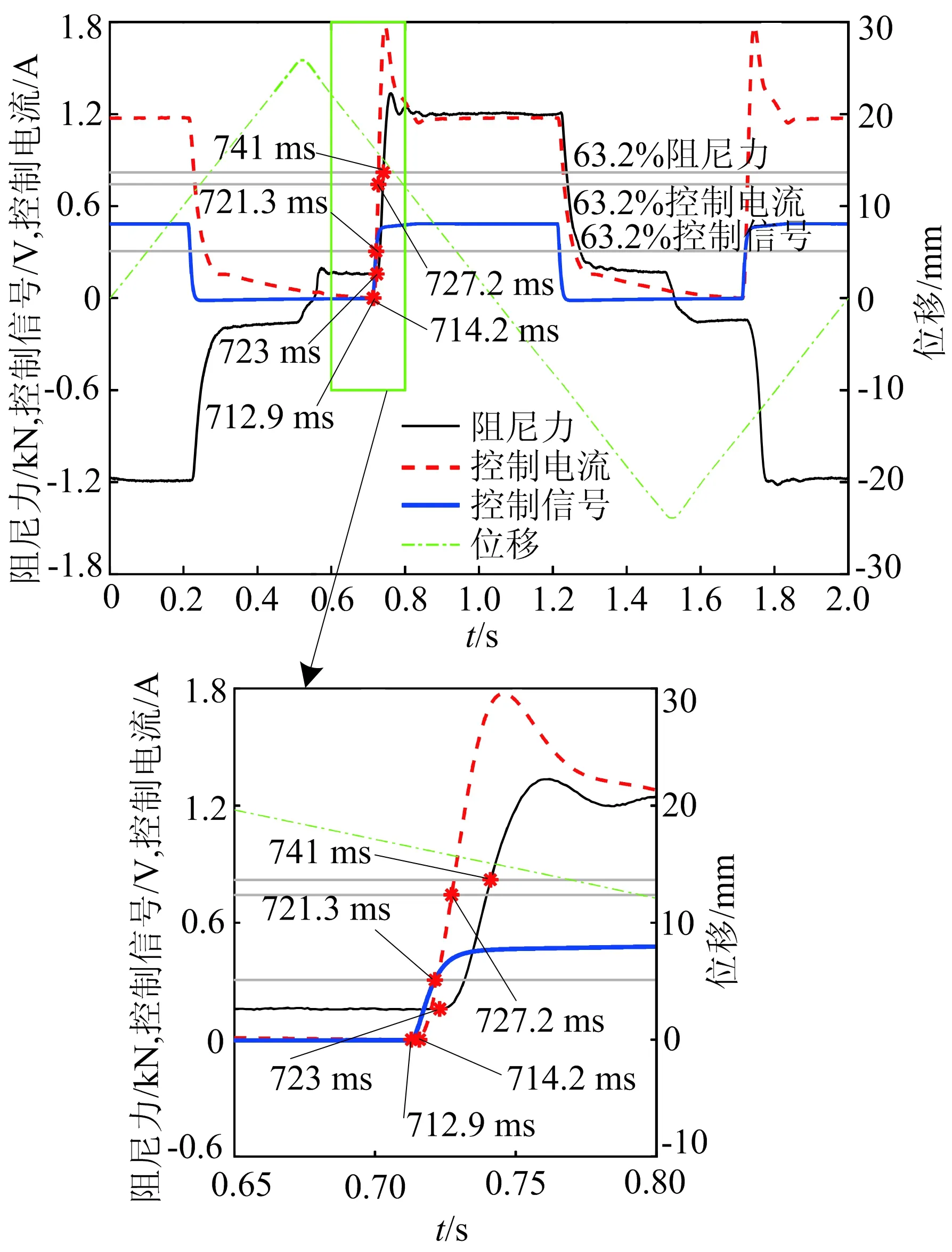
图9 1.2 A瞬态励磁电流时磁流变减振器的响应时间

4 结 论
本文以磁流变减振器的可控特性实验测试过程为载体,进行了磁流变减振器可控特性的标定方法研究,提出了以可控阻尼力范围、动态范围、可控运行速度范围为评价依据的磁流变减振器的力学响应特性和以响应时间为评价依据的时间响应特性的综合评价标准。
(1) 在正弦位移激励实验和高速冲击激励实验条件下进行了磁流变减振器可控力学性能(包括可控阻尼力范围、动态范围和可控运行速度范围)的标定研究。标定过程包括磁流变减振器阻尼力与激励位移、激励速度以及励磁电流的变化关系,采用动态范围与可控运行速度范围更加直观地反应了磁流变减振器的可控力学特性。
(2) 对磁流变减振器控制执行系统的响应时间进行了重新定义,提出了控制执行系统的响应时间为反馈传感器、控制器、可控电流源以及执行器等各单元的响应时间之和,控制执行系统各单元的响应时间是由反应时间和上升时间2个部分构成,且控制执行系统中信号流后端单元的上升时间积累了前端所有单元的上升时间。基于鹭宫伺服液压激振测试系统搭建了磁流变减振器的响应时间测试系统,并结合响应时间的新定义对磁流变减振器控制执行系统的响应时间进行了标定过程说明。该标定过程从系统各子单元的响应时间到整个系统的响应时间对磁流变减振器控制执行系统响应时间的标定进行了全面说明。
本文所进行的磁流变执行器的可控特性的标定方法研究对于大范围推广和标准化应用磁流变执行器及技术具有一定的意义。
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
防爆电机(2022年1期)2022-02-16
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
军民两用技术与产品(2021年1期)2021-07-28
北京汽车(2021年1期)2021-03-04
汽车实用技术(2020年24期)2021-01-05
汽车维修与保养(2020年11期)2020-06-09
