基于周期判别的反辐射无人机抗同步闪烁诱偏方法
2021-09-08 12:09许鹏程朱桂清李陆军
火力与指挥控制 2021年8期
潘 奎,许鹏程,姜 珂,朱桂清,李陆军
(1.空军预警学院雷达士官学校,武汉 430019;2.解放军95174 部队,武汉 430040;3.解放军61764 部队,海南 三亚 572013)
0 引言
反辐射无人机是电子战中的一种重要硬杀伤武器,其利用反辐射导引头对接收到的辐射源信号进行识别、分选,实时检测无人机与目标辐射源的角度偏差信号,形成控制指令,引导无人机飞向目标并最终摧毁目标[1]。为应对反辐射武器的威胁,可在雷达附近部署有源诱饵,诱饵辐射信号与雷达信号在时域、空域、频域、能量域、码域、极化域中相近甚至重合[2]。而闪烁诱饵比恒功率诱饵更能对单脉冲雷达导引头实施有效的角度欺骗,达到显著的诱偏效果[3]。反辐射抗诱饵技术本质是从以上几个维度寻找雷达与诱饵以及诱饵间的不同,并从中识别雷达和诱饵。本文结合反辐射无人机与诱饵作战特点,提出基于导引头测向偏差角来判别闪烁周期,进而分选出某一部诱饵进行攻击的方法。
1 诱饵系统同步闪烁诱偏机理分析
实际应用中,考虑到诱偏效果、诱饵安全以及成本等因素,有源诱饵的个数以3 个为宜,即诱偏系统由1 部被保护雷达和3 个有源诱饵组成[4-5]。雷达诱饵通过有线方式接收雷达激励信号及模式转变信号,产生时间可控的激励信号。雷达诱饵辐射出与雷达相同诱饵信号,并能与雷达保持同步模式[6]。通过控制雷达诱饵信号的发射时序,可以使雷达诱饵工作在同步闪烁模式,如图1 所示,诱饵间存在严格的时间同步关系,为确保雷达绝对安全,在任一时刻,每部诱饵信号前后沿都始终“包裹”雷达信号同步辐射[7]。同时,三诱饵信号按照时间间隔 的时序依次交替靠前,靠前时间通常为微秒级。

图1 雷达诱饵的闪烁时序图
导引头大多采用脉冲前沿采样跟踪体制[8],该体制导引头将对脉冲靠前的诱饵信号进行采样处理。在闪烁模式下,前沿采样体制导引头只能对最先到达的诱饵信号进行采样处理,下一部诱饵信号靠前到达导引头之前,导引头测向误差角数据为上一部诱饵角度数据。三诱饵交替靠前闪烁方式可以等效为三诱饵源周期性地交替发射诱偏信号,如图2 所示,在任意时刻可认为只有一个诱饵辐射信号,其他诱饵信号处于信号发射间歇期,即不发射信号。诱饵间交替靠前时间间隔为,三部诱饵完成一次交替靠前的时间为T=3 ,它也是诱饵系统的闪烁周期。

图2 诱饵同步闪烁时序简化图
假设t=0 时刻,雷达诱饵开始工作,其闪烁时序为:

其中,k=0,1,2,…,n,T=3 。
从式(1)可以看出,不同时间段,导引头将受到3 部诱饵信号交替诱偏影响,经过一个周期T 后,又按照交替时序发射诱偏信号。
2 导引头对诱饵的测角分析
比相体制导引头使用5 个天线阵元构成相互垂直的两对干涉仪天线,分别位于导引头天线阵的方位面和俯仰面,其空间位置如图3 所示,阵元天线在同一平面且呈长短基线分布。

图3 干涉仪天线空间位置及角度关系示意图
θx、θy和θz为目标视线(目标M 与天线C0的连线)与Xp、Yp和Zp轴夹角。那么,目标来波方向在天线阵水平面OXPZP的投影OE 与天线横轴的夹角α为方位面偏差角。目标来波方向在天线阵俯仰面OYPZP上投影OD 与OP 的夹角β 为俯仰面偏差角。
雷达来波方向与俯仰面、方位面天线子阵基线夹角分别为[9]
那么,目标雷达来波方向与天线轴线OXP的夹角θx:
飞控系统根据偏差角数据,引导无人机对目标进行横向和纵向跟踪。但导引头存在视场角Δθ 范围限制,随着无人机不断逼近诱偏系统,诱饵可能脱离导引头视场范围。如图4 所示,ARUAV 在对闪烁诱饵的攻击过程中,无人机航迹随着诱饵闪烁不断修正航向,当俯冲攻击到某一高度点,某一闪烁诱饵脱离导引头的视场,失去诱偏功能,视场角内剩下一个雷达诱饵。最后一个闪烁诱饵存在闪烁信号间歇期,加上无人机航向角改变而脱离导引头视场。在攻击阶段末段,ARUAV 可能出现视场范围内的无闪烁诱饵信号,最终按照最后一次测角数据实时记忆攻击。

图4 无人机攻击多闪烁诱饵航迹示意图
因此,在分析诱饵诱偏影响中,还需考虑诱饵在tk是否在导引头视场范围内。判定临界条件为[10]:

3 导引头天线测角误差角度数据仿真分析
ARUAV 性能参数:飞行高度为2 000 m,搜索阶段飞行速度为45 m/s;导引头视场角范围为60°。
诱偏系统参数:诱饵频率与雷达频率相同,闪烁周期为3 s。三诱饵与雷达采用菱形布阵方式[11],相互间距为300 m。根据以上原则,设置其空间坐标为:雷达(-260 m,0 m,0 m),诱饵1(0 m,0 m,150 m),诱饵2(260 m,0 m,0 m),诱饵3(0 m,0 m,-150 m)。
3.1 闪烁诱偏下,导引头测向偏差角变化情况
在ARUAV 按照固定搜索路径飞行时,根据比相导引头天线阵测向原理,导引头天线方位面和俯仰面测向误差角角度变化情况如图5,图6 所示。
由图5,图6 可见:

图5 天线方位面偏差角变化曲线

图6 天线俯仰面偏差角变化曲线
1)从测向偏差角数据跳变大小和方向可以明显判断出有三部诱饵且周期交替变化。这说明,在末制导攻击阶段,导引头天线方位面和俯仰面的测角数据随着诱饵交替靠前的变化而呈周期跳变样式。那么,导引头信号处理系统就可以通过不同时刻测角数据跳变关系和测角大小,可以测定诱饵系统的闪烁周期Tc。
2)根据测定的诱饵闪烁周期,如果修改无人机飞控系统测角采样周期Ts与诱饵闪烁周期Tc同步,可以实现对某部诱饵的稳定跟踪攻击,如图7所示,当Ts=Tc,无人机能够稳定跟踪某一部诱饵,并最终命中。

图7 Ts=T 时,无人机航迹图
3)从数据的不断跳变到归零的变化趋势可以看出,ARUAV 飞控系统将按照导引头测向误差角数据适时调整攻击姿态,使无人机始终朝着误差角减小的方向调整,由于导引头天线数据在三诱饵间不断跳变,从而控制机体反复跟踪三诱饵,使整个攻击航迹呈现出追摆状态,航迹如图8 所示。无人机末制导攻击末段,随着无人机不断逼近雷达诱饵布阵,三部诱饵先后都脱离导引头视场,诱饵1、诱饵2、诱饵3 分离点空间位置分别为(120.7,279.2,23.6),(124.2,227.7,30.3),(104.9,535.7,-34.5)。无人机最终落点位于(139.6,0,59.7),雷达和诱饵均安全。

图8 无人机在闪烁诱偏下的攻击航迹
3.2 测角采样周期对ARUAV 攻击效能的影响分析
飞控系统的测角采样周期是指飞控系统从导引头获取测向偏差角数据的时间间隔。图9 给出了在末制导测角采样周期为0.2 s、1 s 和3 s 情况下,ARUAV 在2 000 m 的高度平面上,从360 °圆周全方位对雷达阵地实施攻击的落点分布图,杀伤半径为30 m,每间隔2 °进行一次模拟仿真,共计180 次。

图9 不同末制导测角采样周期下ARUAV 落点分布图
由图9 可见,在多诱饵闪烁诱偏下,导引头的末制导测角采样周期对ARUAV 的落点有一定影响。这是因为在攻击过程中,末制导测角采样周期的大小将决定机体调整时刻,上传飞控系统的目标角偏差数据来自哪部诱饵,以及对各诱饵的跟踪次数,这些都会直接影响ARUAV 的最终落点位置。
假设ARUAV 末制导测角采样周期在0.2 s 到4 s 间变化,步进为0.2 s。在不同末制导测角采样周期情况下,对命中概率情况进行仿真。仿真结果如下页图10 所示。
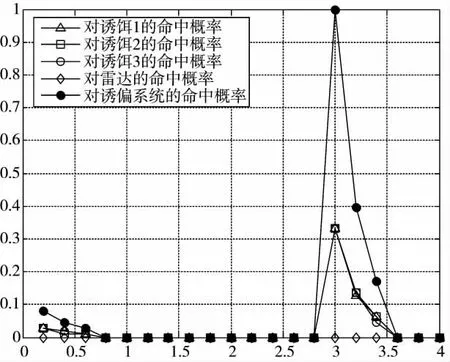
图10 命中概率与末制导测角采样周期关系曲线
从图10 可以看出,首先雷达是安全,ARUAV对各诱饵的命中概率跟测角采样周期有关。当测角采样周期为3 s 时,即测角采样周期跟闪烁周期同步时,ARUAV 命中概率最高,对三诱饵的命中概率分别达到33.3 %,对整个诱偏系统的命中概率达100%。也就是说,当导引头测角采样周期等于诱饵闪烁周期时,任意方向入侵的ARUAV 总是能够命中其中一部诱饵。在测角采样周期与诱饵系统闪烁周期相近时,命中概率相对较高,如在3.2 s 和3.4 s时,对诱偏系统的命中概率分别为39.3%、17.4%。为提高ARUAV 攻击效能,对诱饵信号模式及闪烁周期的判断尤为重要。
因此,无人机飞控计算机信号处理软件应增加对诱饵工作模式的判定、对闪烁信号周期的测量及自动调整末制导测角采样周期的功能,使ARUAV在攻击过程中,飞控系统能够根据诱饵工作特点自动调整末制导测角采样周期,使其与诱饵闪烁周期大小匹配,提高导引头锁定单部诱饵攻击的概率。其软件控制调整流程如图11 所示。
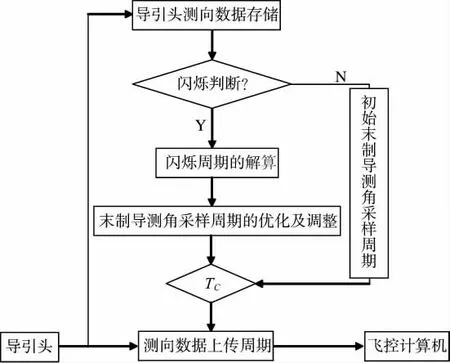
图11 末制导测角采样周期控制框图
由于ARUAV 搜索目标阶段飞行速度较不高,而导引头正确识别并稳定跟踪目标辐射源的距离为数百公里。因此,ARUAV 在末制导阶段有充足的时间来完成诱饵工作模式的判定和末制导测角采样周期的测试和修改。
4 结论
本文研究了在固定航向搜索目标阶段,反辐射导引头对闪烁诱饵测角偏差数据,得出了以下结论:1)在同步闪烁诱饵诱偏条件下,导引头测得的角度数值呈周期跳变的规律性,但对每部诱饵的测角数据大小和方向相对稳定。2)根据偏差角数据的大小和跳变规律,可以实现对诱饵进行的识别分选。3)在反辐射无人机对抗闪烁诱饵方面,可以通过分析无人机搜索阶段的测角数据,识别出诱饵系统的闪烁周期;在末制导攻击阶段,无人机飞控系统按照闪烁周期间隔来采样测角数据,可以实现对诱饵系统某一部诱饵的摧毁。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
航天返回与遥感(2022年3期)2022-07-07
导弹与航天运载技术(2022年2期)2022-05-09
载人航天(2021年5期)2021-11-20
家庭影院技术(2021年3期)2021-05-21
电子乐园·下旬刊(2021年3期)2021-02-08
科学与财富(2018年28期)2018-11-16
科学与财富(2018年26期)2018-10-24
航空兵器(2018年1期)2018-04-09
航空知识(2017年4期)2017-06-30