
一种被动越障机构的设计
2021-09-10 03:59陈世豪刘思雨王守海高巳淇齐迎春
科技风 2021年25期
关键词:机械
陈世豪 刘思雨 王守海 高巳淇 齐迎春
摘 要:随着我国人口老龄化问题越来越严重以及肢体残疾人数量的逐步增加,对辅助步行工具的需求日益增高。但随城市化的不断加快,楼梯和跨越路障等不断增加,所以研究一款简单且价格普通的越障机构很有必要。因此基于连杆机构工作原理和易于操控的思想,设计了一款轮组式越障机构。该结构在实现能够简单地抬升的同时,没有任何电力的应用,纯粹利用机械结构来完成,安全性更高,可靠性更高。
关键词:越障;轮组;机械
The Design of a Passive Obstacle-crossing Function
Chen Shihao Liu Siyu Wang Shouhai Gao Siqi Qi Yingchun
College of Biological and Agricultural Engineering JLU JilinChangchun 130022
Abstract:With the aging of China's population and the gradual increase in the number of physical disabilities,the demand for assisted walking tools is increasing.However,with the acceleration of urbanization,staircases and roadblocks are increasing,so it is necessary to study a simple and affordable barrier surmounting mechanism.When the actuator is driving on the flat ground,each small wheel rotates around its own axis.When climbing the stairs,the wheels revolve around the central axis.The structure can be simply lifted at the same time,there is no electrical application,purely using mechanical structure to complete,higher safety,higher reliability.
Keywords:obstacle crossing;wheel group;machinery
當今社会迅速发展,城市化进程加快,人们生活环境处处都发生了巨大变化,土路坡路修成台阶,人行道高出车道,而与此同时,对行为能力较弱的老年人和残疾人等社会弱势群体来说,却增添了生活中的不便。普通轮椅难以越过台阶、马路沿等障碍,而市面上零星几种的越障轮椅大多由国外进口、价格高,因此,在这种情况下,研究一款简单且价格普通的越障机构,成了方便老年人、残疾人生活的当务之急。
1 研究背景
目前在爬楼梯、越障装置的研究领域内,国外研究开始较早,一些技术已投入市场但价格较贵,相当于中低档轿车的价格。近年来我国相关专利也屡见不鲜,不同的爬楼梯装置适用于不同的环境和条件,各有利弊。按照爬楼执行机构的类型,主要可归结为轮组式、履带式、腿式三类。我们旨在设计出一款可将轮椅从地面抬升至指定高度并在此过程中保持平稳的轮组式越障装置,主要针对的是老年人和残疾人轮椅出行应对非铺装路面或一定程度的台阶攀爬。应用本装置可以很大程度上节省越过障碍时的人力消耗,它所能达到的效果是:节省空间、节省人力、低成本、免维护、使用方便、出行便捷。
2 总体结构设计
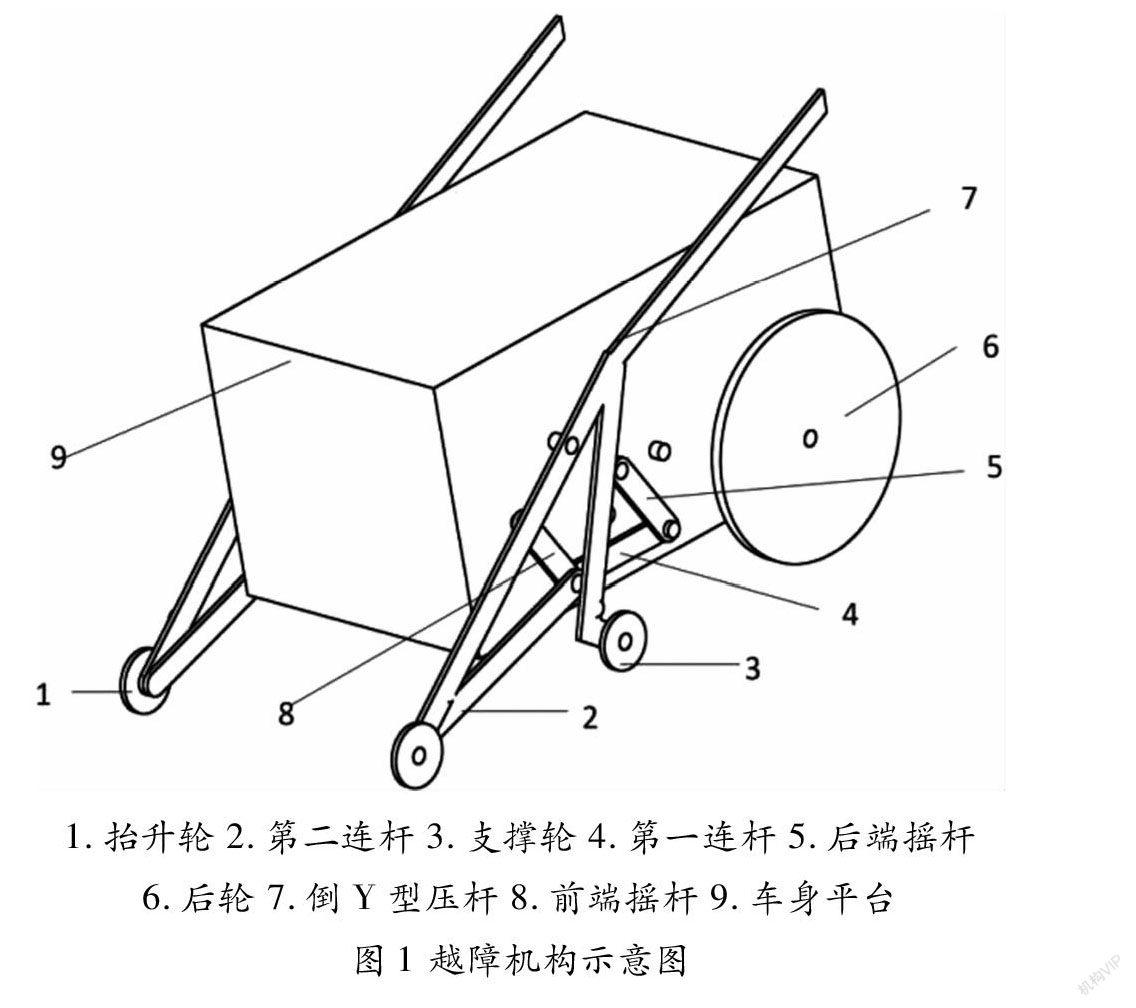
如图1所示为设计的越障机构结构简图,主要由座椅、脚踏板、3组车轮、推杆及三组连杆等主要机构组成。座椅与压杆直接连接,与抬升轮通过一连杆机构连接。连接抬升轮的两连杆机构间通过一平行四边形结构连接,起到增强稳定性作用。两支撑轮上方杆件也由一杆相连。此机构纯依靠机械结构运动,由操控者施加动力,推动车体前行,或后轮上安装动力装置,车体上的越障机构在操控者控制下完成越障,使此越障机构通过性更强,且安全稳定。
3 越障原理
4 越障过程
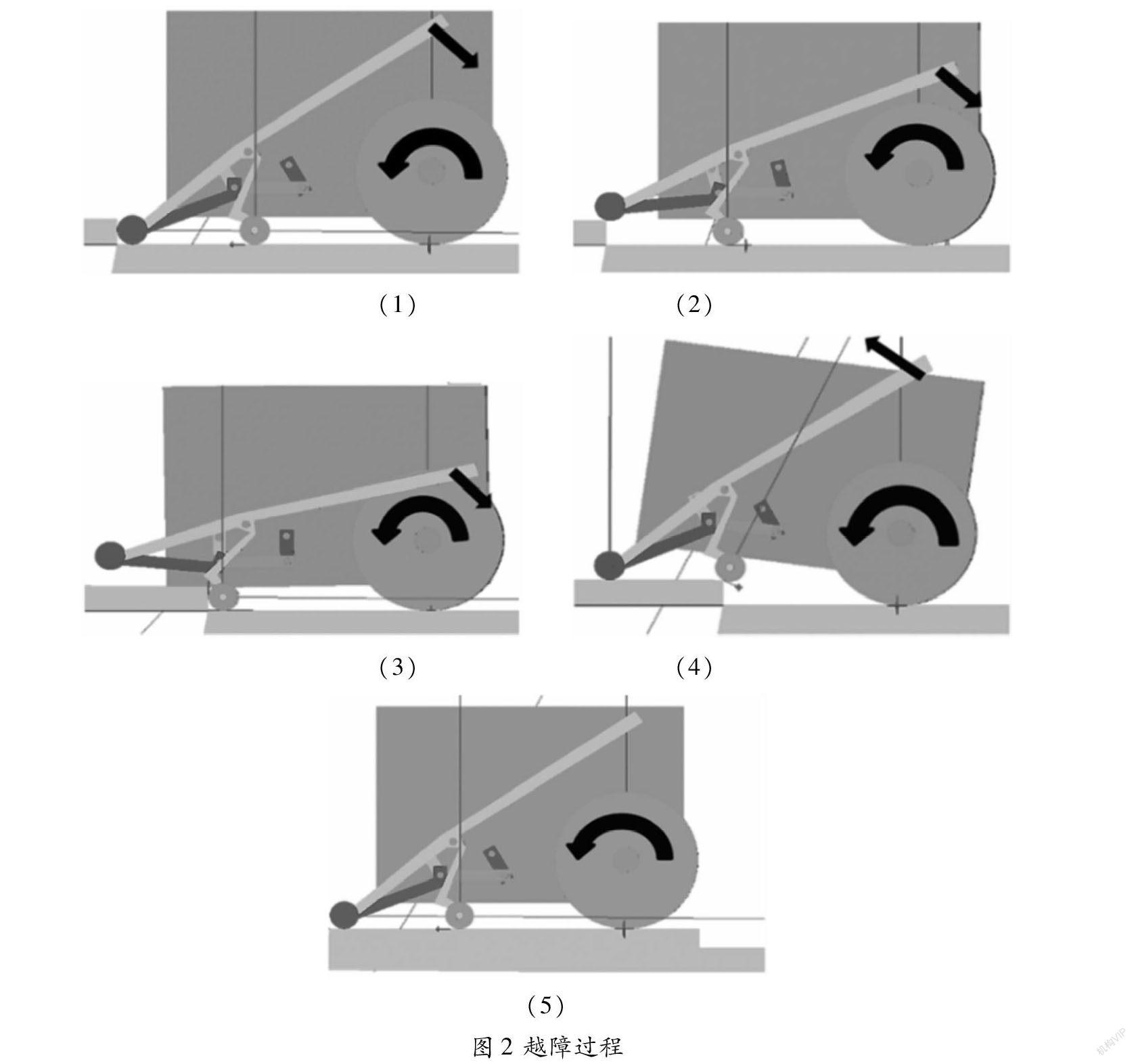
图2所示为所设计越障机构的越障过程。行驶时,操控者推动或后轮驱动车体前行,越障机构处于初始状态,三组轮子分别着地。装有被动越障机构的车体在遇到障碍时,操控者手压Y字连杆7,前轮在平行四杆机构的限位下,升到一定高度便停止,此时前轮可以轻松越过一定高度的障碍如图2(1)、(2)所示,支撑轮3及后轮6与地面接触,维持车体平衡且继续前行;当支撑轮3接触到障碍时,放松Y字压杆,且稍上拉Y字压杆,使支撑轮3翘起,在平行四杆机构的限位下,支撑轮3升到一定的高度便停止,随着车体前行翻越障碍,如图2(3)、(5)所示,车体上装有压杆限位机构,控制压杆转动角度,以控制抬升轮抬升高度,保证越障安全;当抬升轮和支撑轮越过障碍后,操控者放松压杆7,抬升轮和支撑轮下落地面,随着车体前行,后轮翻越障碍,完成越障。三组轮子越障过程中,由杆4、5、8等组成的连杆机构确保抬升轮和支撑轮的运动协调性和限位。使用时,遇到障碍人体重心靠近后轮,可轻易地通过压杆控制抬升轮与支撑轮。
5 创新点
本机构与传统机构的区别在于,传统机构在实现前轮越障时,需要以后轮为支点抬起车体的前半身,由杠杆原理,此时动力臂较短,并且由于车体的前半身较重,阻力相对较大,需要的抬升力较大且由于后轮的不稳定,导致抬升过程不稳定,不易控制。本机构增加了一对Y型压杆,使得前轮和车体不再固联,在抬升过程中只需要抬升前轮的重量,由于支撑轮的存在,使得抬升过程的动力臂较长达到省力的目的,并且能在抬升过程中起到支撑作用,使车身保持稳定。
猜你喜欢
电脑报(2021年11期)2021-07-01
电脑报(2020年35期)2020-09-17
电脑报(2020年30期)2020-08-11
当代工人(2020年8期)2020-05-25
电脑报(2019年40期)2019-09-10
小溪流(画刊)(2017年12期)2018-01-10
知识就是力量(2017年6期)2017-06-29
中学生数理化·中考版(2016年2期)2016-09-10
科技知识动漫(2016年1期)2016-01-27
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
