
启帆工业机器人管线包设计与应用
2021-09-10 07:22李伟华王伟李兴和杨林郑勇山
机电工程技术 2021年2期
李伟华 王伟 李兴和 杨林 郑勇山








关键词:工业机器人;管线包;线束;电缆
0引言
随着工业机器人应用范围的快速扩张,对机器人自身的技术要求也越来越高,比如电缆和气管。由于工业机器人运动的复杂性、使用的特殊性以及环境要求越来越苛刻,对电缆和气管提出了更高的要求,比如环保、阻燃、耐油、耐高低温、耐扭曲、高柔软、高耐磨、抗干扰等。电缆和气管是工业机器人的“血管”和“神经”,一旦电缆和气管出现故障,工业机器人就无法正常工作,这不仅会对客户造成经济损失,而且损害公司良好形象和声誉,同时故障维修的难度和成本相当高。合理的电缆和气管选型、布置,不仅能大幅减少故障问题,还可大幅缩短安装和维修工时,提高生产和维修效率。因此,本文引入了管线包的基本概念及作用,并介绍了启帆工业机器人管线包设计过程与应用情况,为工业机器人管线设计提供了指导和参考。
1管线包基本概念及作用
图1所示为启帆某机器人设计模型与实物照片。工业机器人管线包是为了保护电缆、气管等设计和制作的成套线束方案和产品,可明显减少电缆和气管等磨损、老化,延长使用寿命,更不会阻碍和限制机器人运动轨迹和范围,还可以减少电缆和气管所承受的弯曲和扭转力。管线包设计主要包括零配件选型、线路布置、长度确定以及模块化制作和便捷安装等。
管线包合理的零配件选型和独特的布局设计,即使在极端的弯曲情况下,也能始终保持管线良好的形态和抗压性能,不会对管线零配件造成特别的挤压,为管线提供有效保护。管线包制作和安装具有模块化特点,可提前根据机器人结构和运动范围设计好管线包方案,提前制作好管线包,不用等到现场下料、焊接、边装机边布线等,而管线包的安装更加方便快捷,就如同给机器人穿衣服一样,只需按照预留的安装孔位固定好即可。
2管线包设计过程
管线包设计主要分为物料选型和布置方案两部分,其中物料选型主要有电缆、连接器、气管、气管接头、辅助配件等;而布置方案主要有线束的长度、固定点、保护措施、模块化制作和安装等。这两部分内容是相互影响的。
2.1管线包选型
这里主要介绍管线包电缆、波纹管、气管等基本的常用的物料与选型。
2.1.1电缆
工业机器人通常采用伺服电机,该电机通常有2处接头,其中一处是动力线(有的电机将制动器接线独立出来,因此有3处接头),一处是编码器。以某伺服电机举例说明,如图2所示。
动力线由3根相线、1根地线、1对制动器线构成,制动器线为一双绞线,如图3所示。启帆采用增量式编码器,接头针脚数为7个,其中6个是传递3对信号,剩余1个是屏蔽信号。由于信号线缆含有屏蔽层,因此编码器线只需3对双绞线,如图4所示。线芯规格均可参考电机说明书。
管线包动力线和编码器线均是机器人专用柔性电缆,应能满足机器人运动时高频次、长时间的弯曲和扭转。机器人用电缆需要进行弯曲和扭转寿命测试(可查閱相关厂家产品说明书)。启帆机器人管线包采用某日本品牌FLEX系列电缆,其弯曲和扭转测试数据如表1所示。
2.1.2波纹管
管线包波纹管有以下作用:(1)减少电缆与机器人本体或其他物体的摩擦、刮蹭、划伤等,同时波纹管内壁光滑,对电缆几乎无磨损;(2)电缆比较柔软,无法靠自身形成拱形支撑,而波纹管有较好的韧性,可以较大跨度和高度地支撑起电缆,如图5所示;(3)波纹管将多个电缆集合起来,减少机器人本体电缆的密集感,线路清晰、简洁、美观,如图1所示。
波纹管有多种材质,比如金属、塑料、复合编织材料等,根据不用的需要进行选择。通常波纹管采用塑料,主要是尼龙,其性能也是大相径庭。不能将一般用途的波纹管用于机器人管线包,因为一般用途的波纹管满足不了机器人高频次、长时间的弯曲和扭转而断裂,如图6所示。管线包波纹管跟电缆一样,不仅要做常规项目测试(比如自熄灭性、高温老化、抗拉伸、抗压、抗冲击等),还需要做弯曲性能测试(包括低温弯曲),上述相关测试可查看厂家产品说明书。启帆前期采用某德国品牌波纹管,由于价格昂贵和交期较长,现引进一广州国产品牌,两者规格参数如表2所示。单波纹管是无法使用的,需要配合接头、固定座等附件一起使用。
2.1.3气管
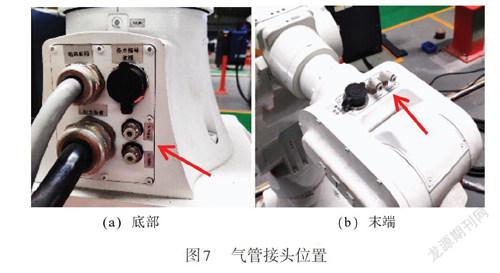
工业机器人本体末端通常采用气动装置,通过吸盘吸附板料,实现取料、上料、取件等动作。通常气管布置和安装不好,很容易就挣脱、甩出、损坏等。启帆将气管和本体电缆一起做到管线包,气管从机器人本体底部引入,如图7(a)所示,一直到本体末端,如图7(b)所示,而客户只需要安装好本体前端的气动装置,接上本体末端和底部的气管接头即可,工作难度和工时大大减少,方便快捷。
气管选型主要是气管规格和气管根数,看客户的具体使用要求,也可参考机器人制造商的推荐。启帆管线包气管规格有外径Φ6mm、Φ8mm、Φ10mm、Φ12mm5种,气管根数通常是1~2根。管线包气管同样要考虑弯曲特性,如弯曲半径过小会导致气管弯折、憋气,甚至破裂。表3所示为某日本品牌气管最小弯曲半径数据。
2.2管线包布置
机器人本体结构设计完成且管线包物料选型大体确定后才开始做管线包布置方案。启帆管线包布置方案是在SolidWorks三维平台基于机器人本体模型来设计的,如图1(a)所示。
2.2.1确定线束大体走向
通常有内置线束和外置线束,其中内置线束在机器人本体内部,多采用中空结构,且管线包安装较复杂;外置线束在本体外部,只需在本体预留固定安装孔位,管线包安装方便快捷。启帆管线包,如图1中MR机器人底座、一二轴座和主臂段采取的外置线束,而副臂、末端手腕以及某些小型机如图7(b)所示则采用内置线束。
2.2.2确定管线包安装固定点
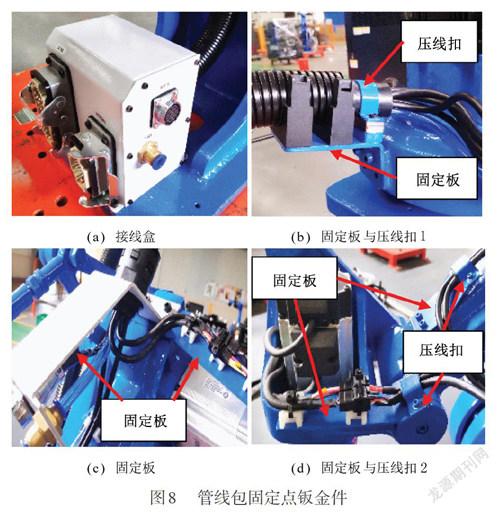
安装固定点自下而上设置,从机器人本体底座一直到末端,通常每隔一定距离要设置一固定点,用于固定或支撑管线包。固定点通常是钣金件,比如接线盒、压线扣、固定板等,如图8所示。设置固定点时,机器人本体各轴是处于零位状态。
2.2.3敷设管线包线束
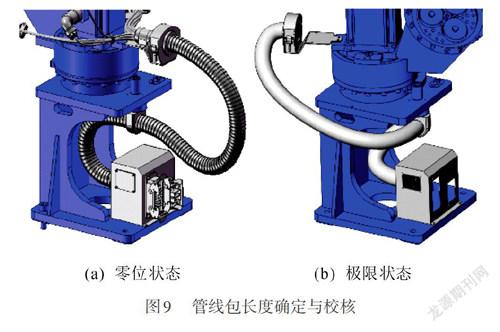
采用SolidWorks中3D草图绘制样条曲线,适当调整样条曲线,尽可能平滑、柔顺,且贴近实物状态,通过扫描完成线束敷设。线束应预留一定的余量即弯曲的跨度、高度等,但不要预留过多,过多会使得管线包线束碰到机器人本体,造成碰撞、磨损等。在零位状态布置好线束后,如图9(a)所示,可量取各段线束长度,该长度值还需要在极限位进行校验,如图9(b)所示。在极限位时,管线包线束弯曲或扭曲程度是最大的,注意核实弯曲半径是否有超出产品的使用范围。
2.2.4拆取管线包组件并出线束图
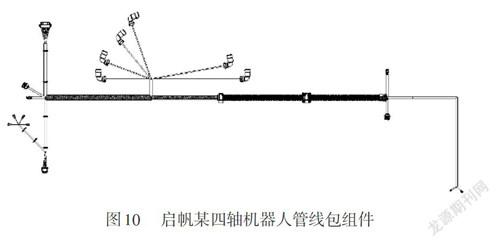
图1(a)所示为启帆某机型人管线包设计完成的模型。拆取管线包组件,使管线包模块化,可单独提前制作好,不用跟机器人本体制作混杂在一起。启帆某四轴机器人管线包组件模型如图10所示。如要生产制作管线包,还需要拆装配图,分成单独的线束图。启帆将管线包线束拆分成動力线束、编码线束、备用线与气管线束3部分,图11所示为启帆某四轴机器人管线包线束。
2.2.5管线包线束与接头固定方式
波纹管固定比较简单,选用配套的接头和固定座就可以,但线束和接头的固定需要注意。通常1kW及以上电机采用圆形接头,如图2所示,通过卡扣和螺纹拧紧固定,而1kW以下电机多采用快插接头,每个厂家规格不一,不利于管线包的批量制作,因此启帆通常将电机原快速接头剪掉,管线包和电机分别统一安装上某一外国品牌的快插接头,如图8(d)所示。
快插接头和电缆如果不固定,机器人运动时,电缆会甩动,接头很容易松脱。电缆可采用压线扣固定如图8(b)与图8(d)所示,也可采用扎带将其固定在固定座上,如图8(c)~(d)所示,但电缆在固定前,一定要包裹胶皮,如图8(b)所示,确保电缆压紧。快插接头通常采取三点固定法,如图8(c)~(d)所示,其中快插接头为中间点,两边线束为前后点,该三点均要固定牢固。启帆通常采用扎带将电缆和接头扎紧在固定座上。
3管线包应用
目前管线包已经全面应用于启帆关节机器人,图1(b)所示为启帆MR6机器人管线包安装完毕照片,图7所示为启帆SRE7机器人照片(管线包内置),图12所示为启帆其他机器人管线包安装完毕照片。启帆自2018年5月取消现场散件布线(边安装机器人本体边布线),引入和设计全新管线包,以及合理的选型与布局,使得布线效率相比之前提高了3倍,管线故障率下降了90%。目前还未收到任何关于电缆和气管磨损、断裂等质量投诉,同时机器人外观更加简洁、美观。
4结束语
本文针对当前工业机器人电缆和气管使用要求越来越高、布线生产效率低、管线故障频发等问题,启帆引进了管线包概念和技术,采取合理的选型与科学的布局设计,取得了良好的应用效果,使用寿命大幅延长、生产效率大幅提高、故障大幅度减少,为今后机器人布线设计提供了重要指导和参考。
猜你喜欢
时代汽车(2022年2期)2022-01-25
中国计算机报(2020年33期)2020-09-13
初中生世界·九年级(2019年6期)2019-08-15
集装箱化(2018年7期)2018-08-23
世界汽车(2018年1期)2018-01-09
世界汽车(2017年12期)2017-12-16
作文·初中版(2017年11期)2017-09-14
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
