二次雷达数据处理系统中动态调整点迹相关门限方法
2021-09-22 06:13刘永刚巫文俊祝正燕
电子技术与软件工程 2021年15期
刘永刚 巫文俊 祝正燕
(四川九洲空管科技有限责任公司 四川省绵阳市 621000)
二次雷达数据处理主要包括点迹处理和航迹处理。一个装载有二次雷达应答机的飞机在一个扫描周期内会产生独立的距离、方位以及属性附加信息的原始应答群,二次雷达询问机接收到这些原始应答群后,点迹处理通过一定的算法、方法将这些原始应答群进行凝聚处理,在二次雷达每个扫描周期,检测出该目标唯一空间坐标位置。实际使用过程中,往往会存在多个二次雷达询问设备对空域中的飞机进行询问探测,二次雷达应答机会对应的产生不同的应答信号,因此询问设备需要甄别出我方询问设备对应的应答信号,需要对原始应答群进行距离、方位的相关处理,当相关次数达到一定门限后,判定处于该距离、方位上存在一个真实的二次雷达目标。因此相关次数的设置,对于二次雷达的探测有重要影响,如果相关次数设置过小,可能会产生虚假目标,相关次数设置过大,又会导致对目标的探测概率下降。而航迹处理通过每个扫描周期之间点迹的相关,从而建立航迹、更新航迹,实现对飞机的持续跟踪。
为了保证二次雷达的探测概率,同时降低虚假目标出现的概率,本文提出一种二次雷达点迹处理中相关次数动态调整的方法,可以在点迹凝聚时,根据当前的航迹信息,提前知道可能存在的目标信息,点迹凝聚时,根据已知的目标信息,判定此次应答是否为真实应答,从而动态设置相关次数门限。
1 二次雷达数据处理系统
二次雷达数据处理系统,通常由点迹处理模块、航迹处理模块组成。系统组成框图如图所示。其中点迹处理模块接收来自译码模块的原始应答报告,对应答报告进行应答间相关处理,形成点迹报告。通过对应答数据的多次相关处理,可以有效地剔除异步应答信号,完成对目标的初步探测。航迹处理模块接收来自点迹处理模块的点迹报告,对点迹报告进行扫描周期间的相关处理,完成航迹建立、航迹更新。部分点迹报告会具有一个或多个错误,通过参照飞机的航迹历史信息,不仅可以识别出所存在的错误,而且能将错误更正。二次雷达数据处理系统框图如图1所示。
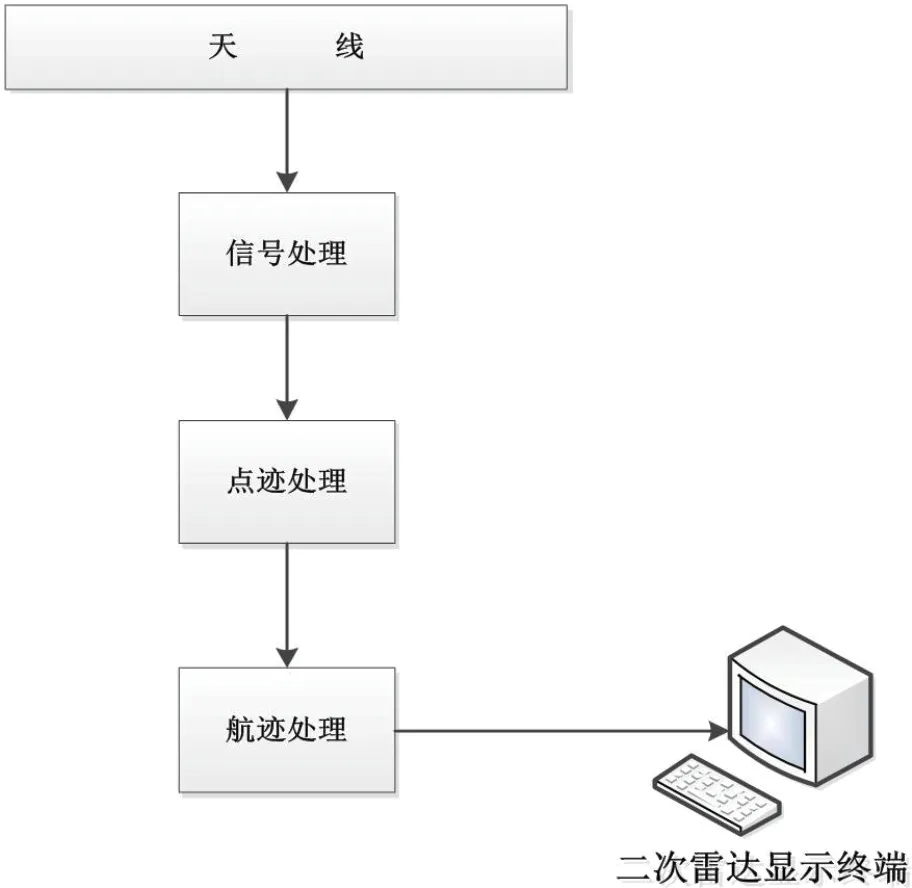
图1:二次雷达数据处理系统框图
1.1 二次雷达的点迹处理原理
二次雷达天线波束掠过目标时,应答机会产生一系列应答信号,其中包括每次应答都会带有其他属性信息,主要包括:应答信号的幅度、模式代码、高度码、告警信息等,后端数据处理将所有属于同一架飞机的应答信号通过距离相关、方位相关识别出来,当这些应答信号次数超过设定的相关次数门限时,认为这些应答信号为本询问机询问回来的真实飞机的应答信号。再将这些同一飞机的应答信号,通过算法处理后,得到飞机的位置信息、高度、A模式代码、告警信息,即目标点迹信息。点迹处理原理如图2所示。
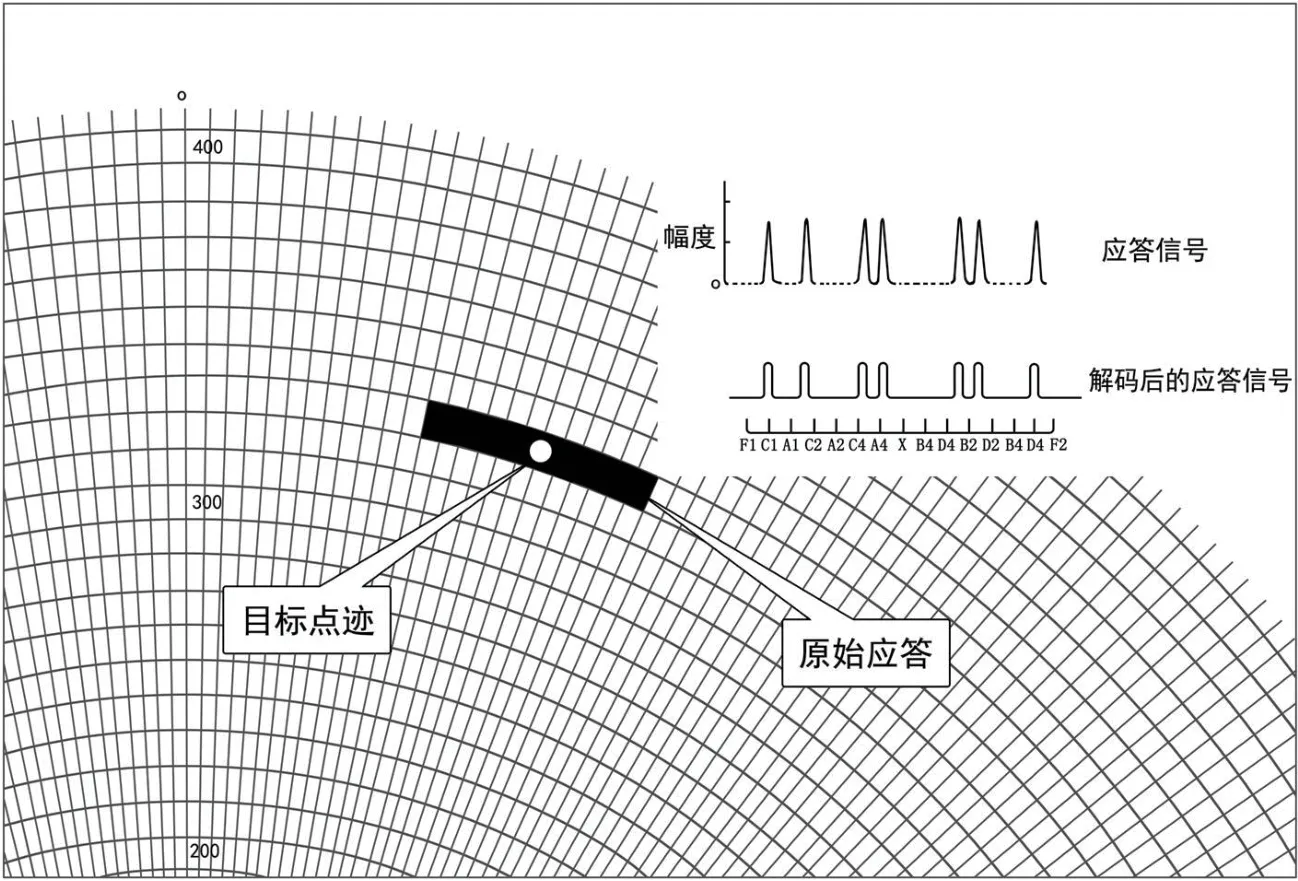
图2:点迹处理原理图
1.2 二次雷达的点迹处理流程
二次雷达点迹处理分为以下几个步骤:
1.2.1 原始应答信号接收
原始应答信号经过译码初步处理后,剔除幅度小的应答信号以及旁瓣的应答信号,形成可能的目标应答信号。
1.2.2 点迹相关
(1)将原始应答信号与已有点迹节点进行距离相关、方位相关;
(2)相关上,则更新该点迹节点的位置信息、属性信息,并将距离、方位、代码信息存储到点迹节点内;
(3)点迹节点的相关次数加一;
(4)否则,该应答为新的目标应答,新建点迹节点,等待后续新的应答数据进行相关。
点迹相关的处理流程如图3所示。
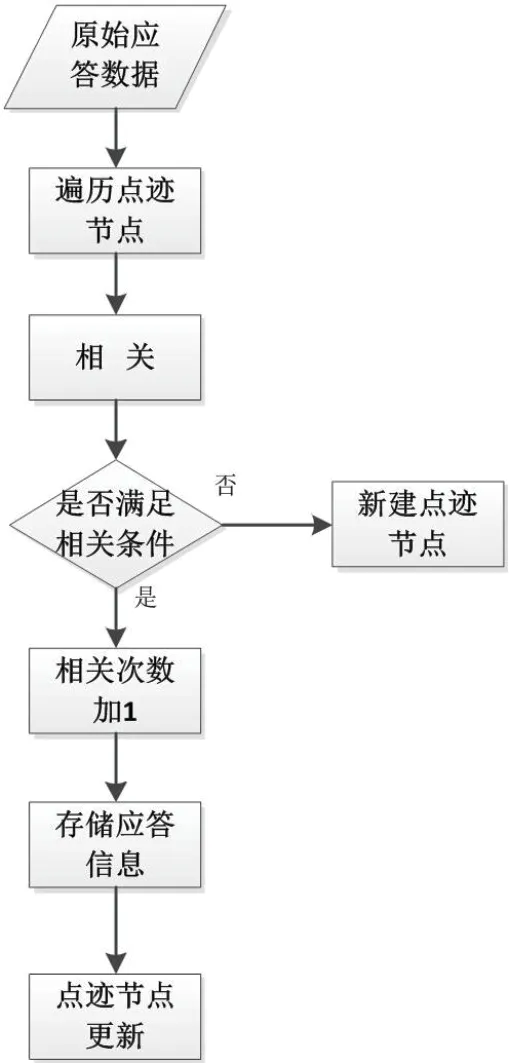
图3:点迹相关流程图
1.2.3 点迹凝聚
点迹凝聚流程如下:
(1)判断点迹节点的相关次数,如果相关次数大于凝聚次数门限值(典型值为4),则进行方位凝聚、距离补偿、代码处理,否则删除该点迹节点;
(2)根据点迹节点存储的天线方位、符号位、OBA值以及点迹节点的距离,查找OBA表,得到每组译码数据对应的点迹方位,滤除异常值后对方位进行求平均,得到最终的点迹方位;
(3)处理点迹节点内存储的代码,选择出现次数最多的代码作为最终的代码;
(4)凝聚后的点迹如果满足上报的条件,则发送点迹到航迹处理模块,进行后续的航迹处理。
点迹凝聚流程图如图4所示。
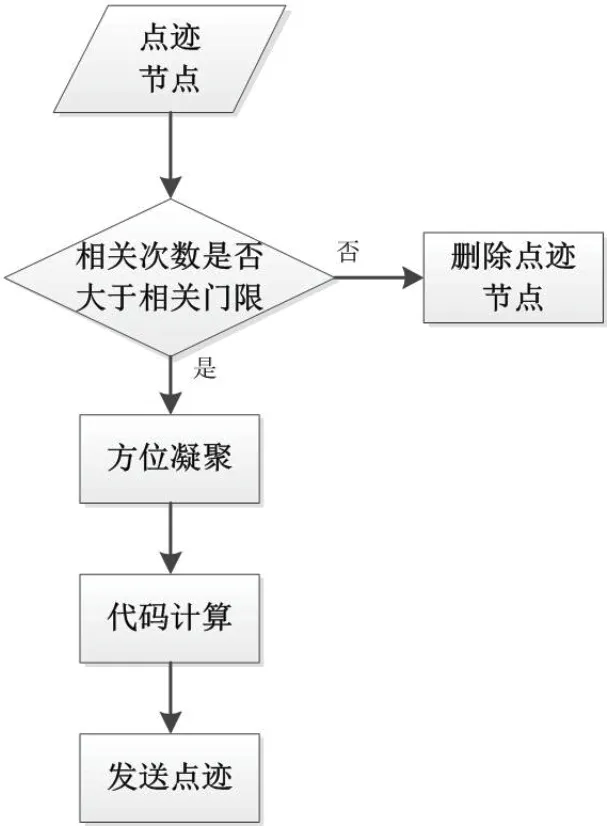
图4:点迹相关流程图
1.3 二次雷达的航迹处理原理
应答信号经过点迹处理形成点迹后,再经过航迹处理形成航迹。航迹处理在二次雷达数据处理中主要有以下两个作用:
1.3.1 降低虚景
航迹处理可以理解为是一个点迹滤波器,通过航迹预测,修正和抑制一些点迹目标,因此经过航迹处理后,形成的航迹目标大大降低了虚景出现的概率。
1.3.2 提高探测的质量
通过航迹的运动模型限制,可以在系统允许的范围保持目标的跟踪探测。通过使用滤波算法,可以提高目标的跟踪平滑程度。
1.4 二次雷达的航迹处理流程
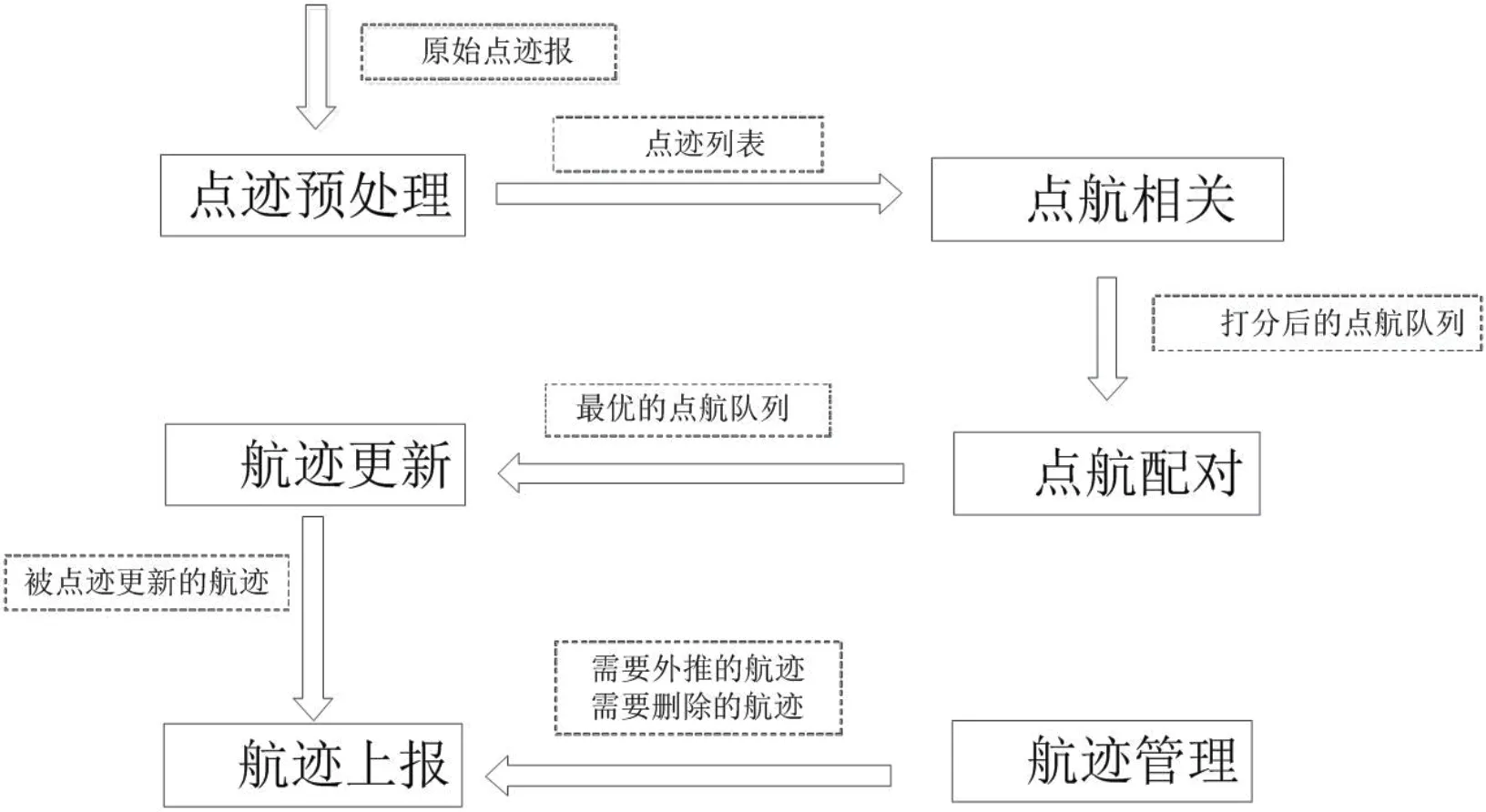
图5:二次雷达航迹处理流程图
二次雷达航迹处理流程如图5所示,主要包括:点迹预处理、点航相关、点航配对、航迹更新、航迹管理以及航迹上报。
2 一种二次雷达点迹处理中相关次数动态调整的方法
本文所提出的方法包含以下3个步骤:
2.1 完成对目标的初步探测
首先,原始应答信号经过点迹处理,对应答间的相关处理将单个的应答转化为原始应答报告。每相关一次,相关次数加1,相关次数达到相关门限(典型值4次),则建立点迹;
经过连续几个天线扫描周期(典型值为3)的探测,对扫描周期之间点迹进行相关处理,完成航迹建立,并初始化航迹的存活周期,点迹与航迹每成功相关一次,航迹存活周期加1。
航迹建立后,在新的天线扫描周期开始时,将航迹列表信息发送给点迹处理,航迹列表信息包括:目标A模式代码、目标高度、目标距离、目标方位、航迹存活周期。
目标初步探测示意图如图6所示。
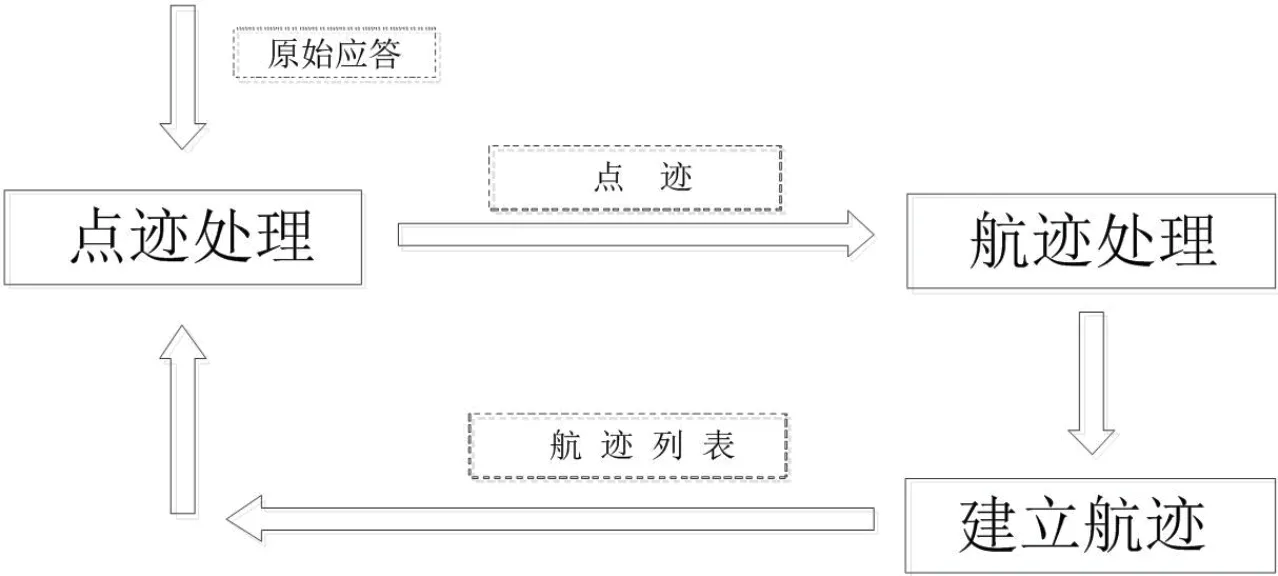
图6:目标探测示意图
2.2 建立目标索引列表
点迹处理接收到航迹列表信息,以航迹列表信息中的A模式代码为索引值,由A模式代码的编码规则,可知A模式代码一共存在4096种不同组合,将A模式代码与目标距离、目标方位、目标高度、航迹存活周期建立索引关系。

表1:目标索引列表构成表
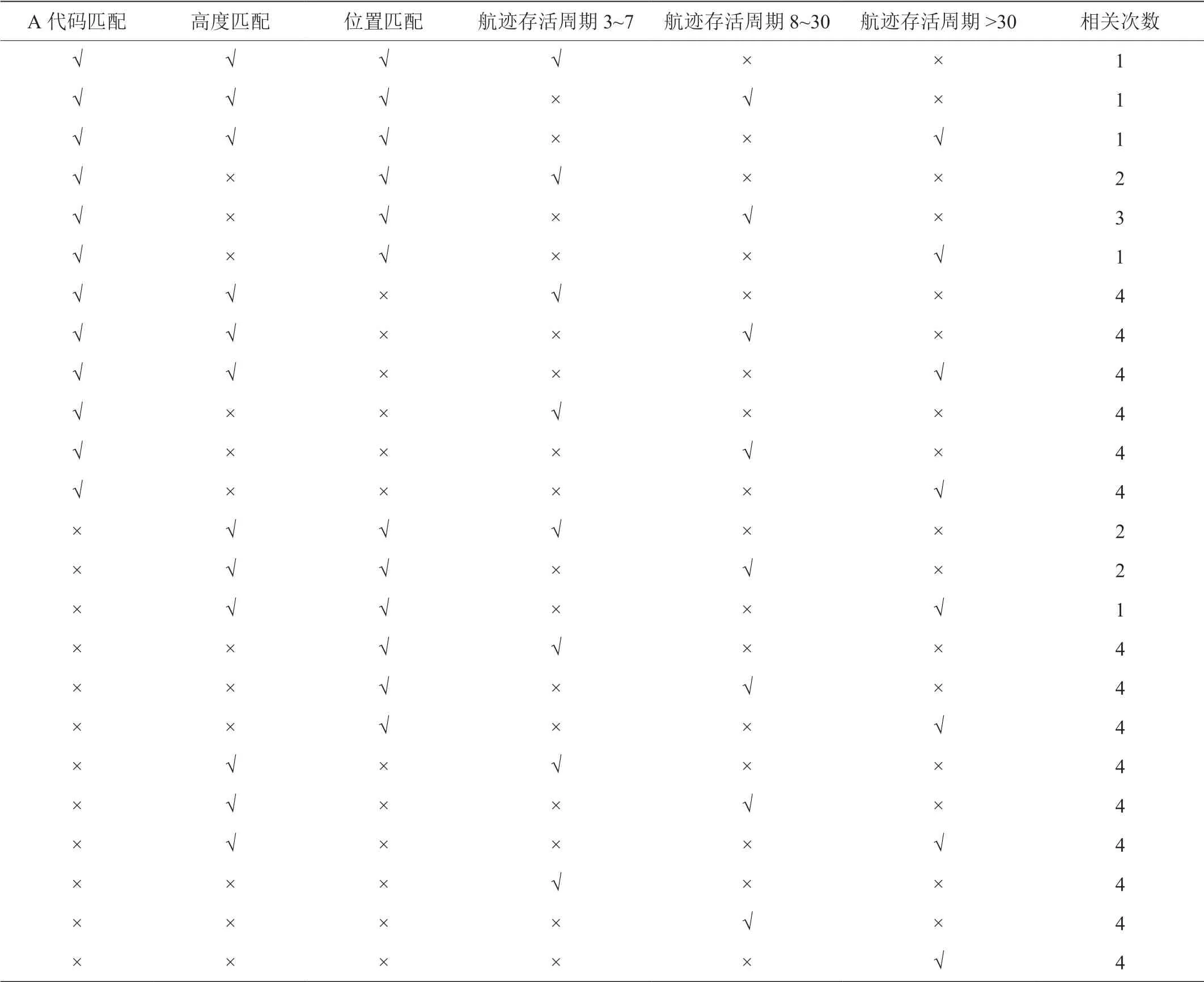
表2:相关次数动态调整示意表
目标索引列表建立示意图如图7所示。

图7:目标索引列表建立示意图
目标索引列表构成如表1所示。
2.3 目标索引匹配
2.3.1 代码匹配
点迹处理在进行点迹凝聚时,以点迹节点的A模式代码为索引值,对目标索引列表进行索引查找,如果成功索引到,表示代码匹配成功。
2.3.2 位置匹配
将点迹的位置信息与目标索引列表对应A模式代码的目标位置信息进行相关处理,如果在相关门限内,表示位置匹配成功
2.3.3 高度匹配
点迹的高度信息与目标索引列表对应A模式代码的高度信息进行比较,如果两者在一个窄高度差内,表示高度匹配成功。目标索引匹配示意图如图8所示。

图8:目标索引匹配示意图
2.4 动态调整相关次数
点迹处理进行点迹凝聚时,根据点迹与目标索引列表的匹配度,结合航迹存活周期来动态调整相关次数门限。相关次数调整示意表如表2。
2.5 点迹凝聚
按照表2中的相关次数,完成相关次数的动态调整,对点迹节点进行点迹凝聚,如果点迹节点的相关次数大于动态门限值,则该点迹节点为真实目标,计算目标的方位、距离、代码等信息后发送给航迹处理模块进行后续的航迹处理。
3 相关次数动态调整方法的实现和效果分析
二次雷达在实际探测过程中,受限于探测威力限制,当目标在二次雷达探测威力附近时,应答次数开始变少,随着目标离询问机距离变远,接收到的应答信号次数逐渐变少,直到无法探测到该目标;同时由于二次雷达的探测原理,应答脉冲在传输过程中可能会受到环境因素以及采样的影响,导致询问机能够识别出的应答信号次数变少。以往的二次雷达数据处理中,点迹处理相关次数使用固定值(典型值4次),对某二次雷达询问机的原始应答数据进行分析,该数据已剔除虚假应答,分析结果如表3所示。
从表3中可以看出,如果使用固定值的相关次数(典型值4次),将会有90.8%(定义为p1)的点迹能够形成目标点迹,9.2%的点迹因相关次数达不到要求被剔除,而无法形成目标点迹。

表3:某二次雷达点迹统计表
基于以上情况,在二次雷达数据处理中进行点迹处理时,需要对相关次数门限值进行动态调整。如果使用本文中提到的方法进行数据处理,对数据进行重演,结果为有96.7%(定义为p2)的点迹能够形成目标点迹,3.3%的点迹因相关次数达不到要求被剔除。相比于固定相关次数的方法,探测概率提高值Δp,
Δp=p2-p1
可以得出本文提出的方法相比较于固定相关次数的方法,该二次雷达探测概率提高值为5.9%。
4 结论
二次雷达中,通过对飞机的应答信号进行数据处理,主要包括点迹处理、航迹处理,可以准确定位飞机的位置,识别目标二次代码,并通过应答累积,进行应答间的多次相关处理、扫描周期间的相关处理,能有效地甄别出虚假应答。由于需要进行应答累积、应答多次相关,因此至少需要2次以上的应答信号(典型值为4次),而在实际工程中,某些情况下询问机能够甄别出的应答次数不足4次,特别是在一些扫描周期短的二次雷达中,由于受限于询问时间的限制,因此单个扫描周期内获得的应答次数会更少,这会降低二次雷达的探测概率。
本文通过二次雷达数据处理中的航迹处理,在建立航迹后,获得目标的真实位置信息、A代码信息,进行点迹处理,由于已经获取到所有的真实目标信息,通过原始应答与航迹列表的匹配,根据匹配程度,动态调整相关次数,使得在目标应答次数偏少的情况下,也能很好的探测到目标。点迹处理时,由于降低了相关次数,也同时增加了产生虚假点迹的概率,后续的航迹处理进行扫描周期之间的相关处理,可以解决虚假点迹的问题。
根据分析比较,本文中的一种二次雷达数据处理系统中动态调整点迹相关门限的方法,能有效提高二次雷达的探测概率。
猜你喜欢
中学物理·高中(2021年3期)2021-06-06
小学生学习指导(中年级)(2021年4期)2021-04-27
青年歌声(2019年12期)2019-12-17
火控雷达技术(2019年1期)2019-04-11
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
舰船科学技术(2015年8期)2015-02-27
华东师范大学学报(自然科学版)(2014年3期)2014-03-11