
基于Amesim的恒量变压柱塞泵的建模与仿真
2021-09-23 09:45孙会来李瑞川孟令雪丁馨铠
汽车实用技术 2021年17期
贾 宁,孙会来,李瑞川,孟令雪,辛 浩,丁馨铠
(齐鲁工业大学(山东省科学院)机械与汽车工程学院,山东 济南 250353)
引言
斜盘式轴向柱塞泵是液压传动与控制系统中的重要元件,有体积小、重量轻、结构紧凑、工作压力高、容易实现变量,且在复杂环境中仍能保持较高容积效率等特点,被广泛应用于造船、汽车和石油开采等工业领域。但由于轴向柱塞泵存在易泄漏,自吸能力差,对精密偶件的配合精度要求高,对油液的清洁度要求较高等缺点,所以需要较高过滤精度。
国内外很多学者在研究轴向柱塞泵的过程中发现,发现造成震荡噪声和泄漏的重要因素之一是柱塞泵在吸、压油过程中存在周期性的流量脉动,从而直接影响到泵的性能。张斌[1]等也对数字式柱塞泵的流量、压力和功率控制等功能进行了研究,其方法是通过建立数字式柱塞泵虚拟样机进行虚拟样机仿真和试验测试。蒋兴平[2]、刘庆修[3]对恒压变量柱塞泵进行的仿真研究则是利用了AMESim软件,并最终得出该型恒压变量柱塞泵正常工作时泵口的压力和流量特性。常见研究对柱塞泵的计算往往过于粗糙且没有考虑其控制特性。本文运用AMESim对恒量变压柱塞泵的静动态特性进行仿真研究,采取更加精细的建模,并加入PID控制电机转动,使柱塞泵流量更加稳定。
1 恒压变量柱塞泵的工作原理及变量特性
图1是一个拥有两个自由度的简化系统,它表明柱塞与斜盘之间的工作原理。两自由度中,自由度一是斜盘绕Z0轴的旋转运动,自由度二则是泵绕X0轴的旋转运动。图2是一个分得两个自由度的坐标系,点P1是后续计算的参考点,代表柱塞1 在坐标系统2中的位置,其他柱塞或斜盘和柱塞间接触点位置的计算公式都与该点相同。

图2 对应2自由度的坐标系统
该系统工作原理:当泵出口流量处于先导流量控制阀设定范围内时,为最大压力工作状态。
当出口流量超出先导流量控制阀预定范围时,会开启先导流量控制阀,溢流状态会形成排量差,该排量差位于恒量控制阀阀芯两端。
当排量差大于先导流量控制阀阀芯右位弹簧排量时,会导致先导流量控制阀阀芯换向,使得泵出口压力油通向变量活塞右腔,液压泵排量变小,从而维持泵出口排量。
当泵出口排量回到先导流量控制阀设定范围内时,会关闭恒量控制阀,溢流状态停止,弹簧力使得恒量控制阀阀芯换向复位,变量活塞保持不变,泵出口排量趋于稳定。
根据图2可知,若恒量变压柱塞泵在工作时的输出排量小于先导流量控制阀设定排量,则柱塞泵会全压力输出压力油,即定压输出;若泵出口流量达到先导压力控制阀预定排量,为满足系统要求,恒量变压柱塞泵会自动调节泵的输出压力来保证恒定压力。
2 动力学分析
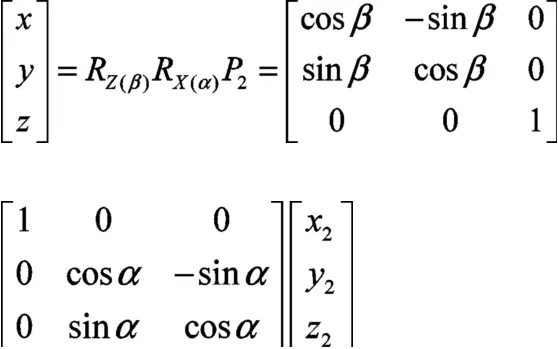
图2中,柱塞1与斜盘之间的接触点是在坐标系统x2,y2,z2中定义的。点P1在坐标系x0,y0,z0中的表达式如式(1)―(3)。
设有两坐标系统,坐标系统1为OXYZ,坐标系统2为O1X1Y1Z1,某一点P在O1X1Y1Z1坐标系中的坐标为,在OXYZ坐标系中的坐标为,而O1X1Y1Z1是OXYZ绕X轴正方向旋转α角所得。这里正方向遵从右手定则,即当右手握住X轴,大拇指指向X轴正方向时,其余四指指向为绕X轴旋转的正方向。此时坐标变换关系为:

而如果OX2Y2Z2和O1X1Y1Z1之间的关系为O1X1Y1Z1绕Z轴正方向旋转β角得到OX2Y2Z2,那么此时坐标变换矩阵为:

根据式(1)(2),从坐标系OX2Y2Z2到坐标OXYZ的坐标变换矩阵为:

柱塞分布坐标公式为:

则在任意旋转角度下,柱塞中心横坐标计算公式为:

柱塞在X轴方向的速度变化为式(5)的导数,表达式为:

式(6)的作用是推导旋转运动到直线运动的变换关系。
由工作原理可知斜盘式轴向柱塞泵轴向柱塞泵缸体旋转一周,全部柱塞腔排量q为:

式中:dz为柱塞外径;Fz为柱塞横截面积;smax为柱塞最大行程;z为柱塞数;nb为传动轴转速。
柱塞最大行程smax为:

式中:Df为柱塞分布圆直径;为斜盘倾斜角。
所以,泵的理论流量Q1b为:

泵的实际输出流量Qsb为:

3 仿真模型建立及分析
3.1 单个斜盘式轴向柱塞泵建模
利用系统建模平台 LMS Imagine. LabAMESim,建立柱塞泵模型。通过AMESim ,可根据斜盘式轴向柱塞泵的工作原理搭建出 5个柱塞的仿真模型。 可从元件库里选用[5]原动机、可调节流阀、油箱、油路等元件,并将柱塞组件、斜盘、配流盘等元件封装成单个柱塞模型,从而组成超级元件。
最简单的柱塞运动仿真草图如图3所示。在柱塞泵的实际建模过程中,节流口是区分成进油节流和回油节流的。另外,由于通过节流阀的开口量来模拟进、回油节流窗口的大小,应该将输入节流阀的信号转化成开口量的百分比。由活塞元件和液压腔体模拟而成的液压泵柱塞可被看成是机械和液压之间的转换元件。活塞腔的容量取决于活塞的位置和流体的弹性模量(弹性模量同时是压力的函数)。详细的仿真模型还可以考虑柱塞的泄漏。
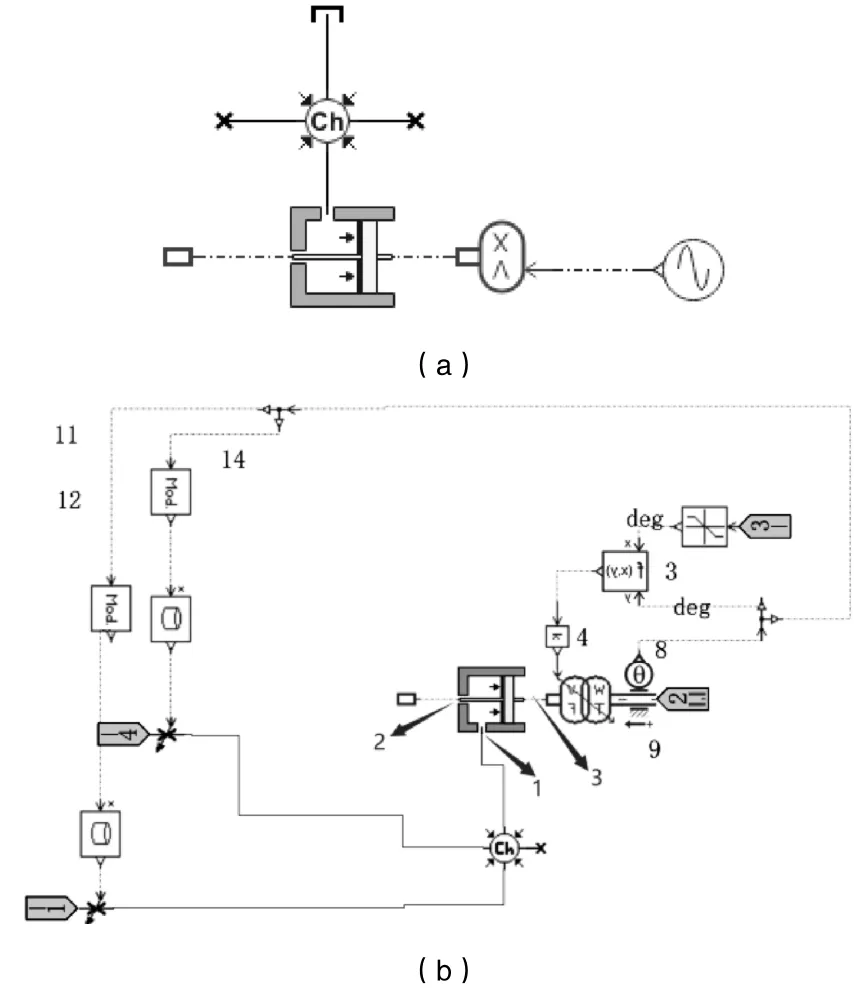
图3 单个柱塞斜盘式轴向柱塞泵AMESim模型
在只考虑了旋转运动惯性负载的单自由度的柱塞泵模型中,斜盘角位移被当做数字信号输入,在本仿真例中没有考虑动态性能。本仿真的目的是将复杂的柱塞泵仿真模型拆分成若干元件组,并分别对每一部分元件组进行单独仿真调试,最后可将每一部分都成功地仿真组合起来,从而完成整个仿真过程[6]。
本文所研究的定排量泵是在稳定情况下工作时其排量保持不变。在进行仿真分析时,可通过AMESim 软件建立柱塞泵两自由度模型,其中增益k为分布圆半径,可将斜盘倾角和缸体转动角速度通过一个速度转换器改变为直线形式输出。
3.2 柱塞泵的整体模型
搭建柱塞泵整体模型需要将上述单柱塞模型封装成超级原件,同时将几个柱塞进行并联,并连接电机驱动模块,之后在电信号模块加入PID模糊控制模块。改变斜盘的倾角可通过对信号输入进行设置,控制柱塞泵的转速可通过对电机驱动转速进行设置,改变缸体的转动惯量和摩擦可通过对转动惯量模块进行设置,改变柱塞泵的负载大小可通过对负载节流口进行设置。
3.3 轴向柱塞泵性能参数
本文所研究的轴向柱塞泵模型有5个柱塞,可用来对柱塞泵运动规律和流量特性进行仿真研究。该轴向柱塞泵性能参数设置如表1所示。
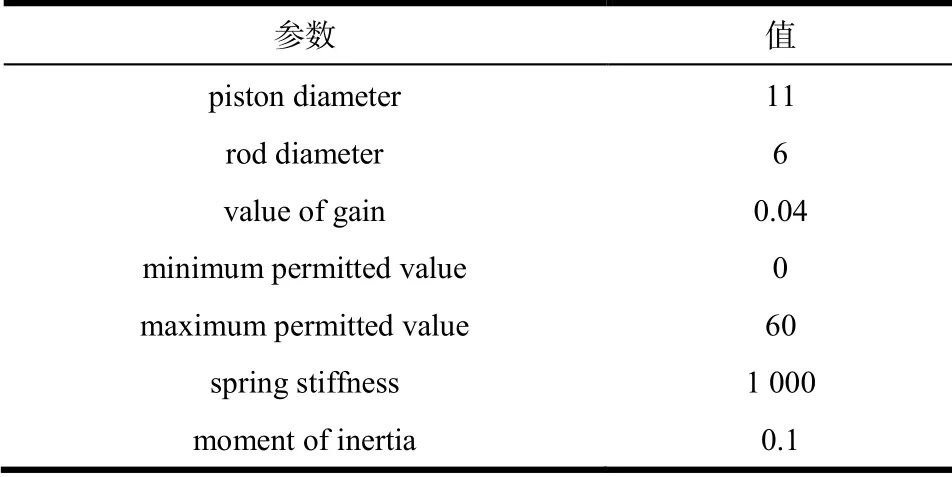
表1 轴向柱塞泵性能参数表
3.4 仿真分析
由于传统的柱塞泵都是给定转速,泵油量很难控制,就导致流量在到达一定大小后呈现较大的上下波动。本文利用AMESim仿真出的模型是给定柱塞泵的流量,流量决定转速。
如图4、图5所示的柱塞泵流量、腔室容积变化,表明本文单柱塞泵的流量变化及腔室容积变化都是稳定的。
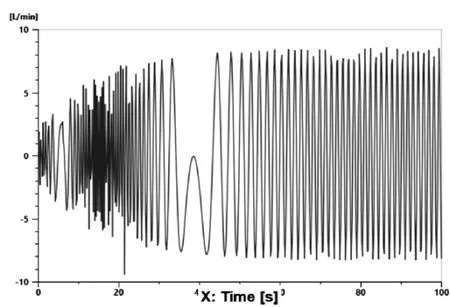
图4 单柱塞泵流量变化
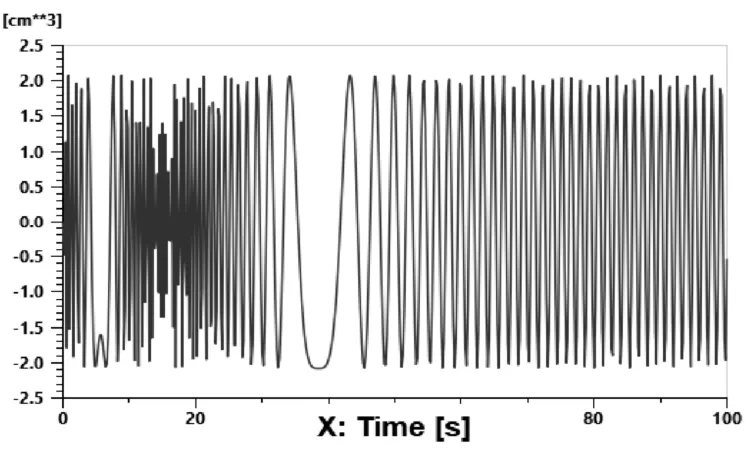
图5 单柱塞泵腔室容积变化
如图6、图7所示,表明柱塞泵总流量在到达13 L/min后,电机转速稳定在620 r/min,且上下波动小,本文柱塞泵在到达正常工作总流量时的转速相比于传统柱塞泵模型要稳定得多。这样一来,可以对总流量进行调整,从而达到控制电机转速的目的,比传统柱塞泵更易于调节且更稳定[4]。在电信号控制方面,比较传统柱塞泵模型,本文的轴向柱塞泵模型在电机信号前加入了PID模糊控制模块,这样可以增加柱塞泵工作的稳定性[5]。用AMESim对本文的恒量变压柱塞泵模型进行仿真后也验证了这一点。相比于没有PID模糊控制的模型(图8),加入了PID模糊控制的柱塞泵模型在对总流量进行调整时,得到相应的转速的稳定性更为优秀[6]。
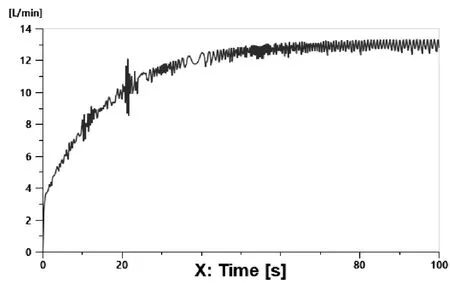
图6 柱塞泵总流量

图7 柱塞泵转速变化
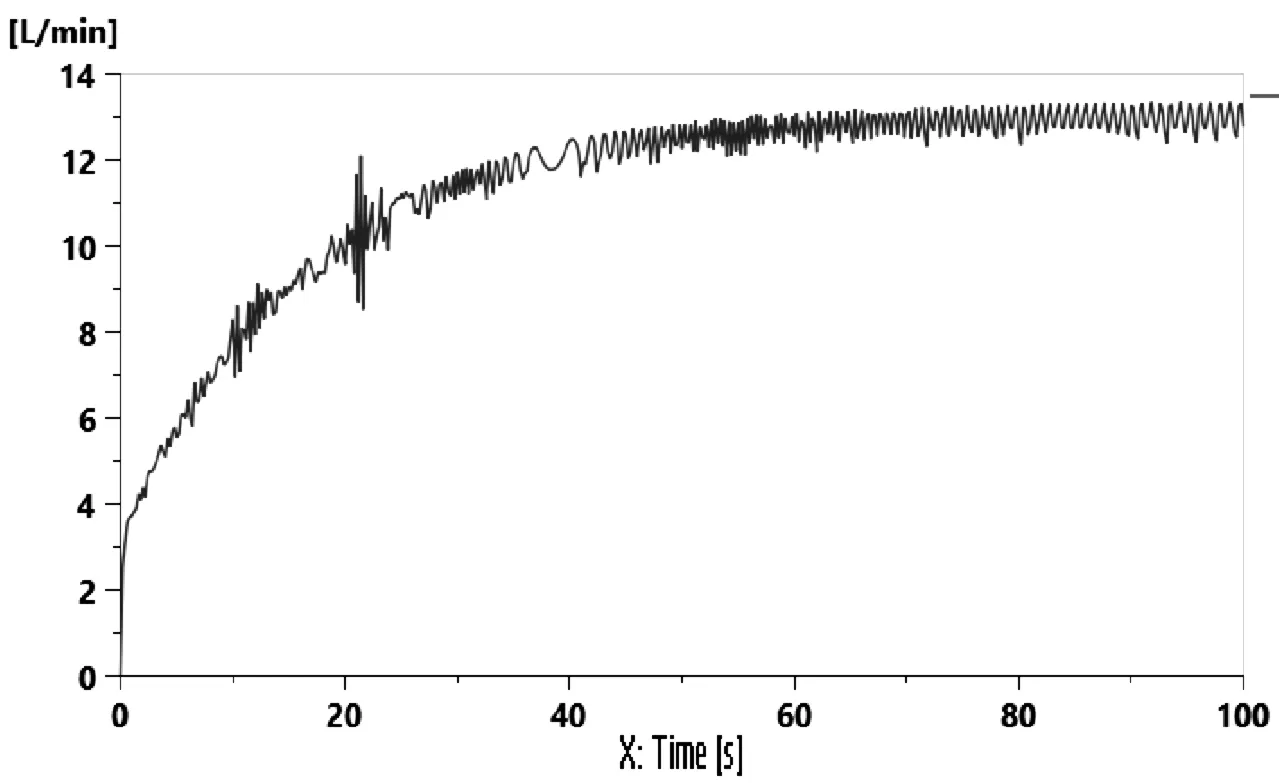
图8 没有PID控制的曲线
4 结论
本文主要研究恒压变量柱塞泵在负载发生变化时,能通过调节变量活塞来改变泵的输出流量,从而达到恒压目的的动态响应过程。在利用 AMESim 软件对恒压变量柱塞泵特性进行仿真研究过程中,得出该型恒压变量柱塞泵正常工作时的泵口压力和流量特性。对于恒压变量泵控制系统的钻机进给回路,可利用 AMESim 软件对其进行建模仿真,并通过PID调节系统,实现了恒压变量泵控制系统在工作时具有保持压力恒定,减少了柱塞泵的波动[7]。
利用AMESim平台,建立关键部件仿真模型,对恒量变压柱塞泵静动态特性进行仿真研究,得出流量脉动和柱塞运动速度波动特性曲线。通过PID调节使柱塞泵最终流量趋于稳定。
猜你喜欢
内燃机与配件(2021年20期)2021-10-20
计算机与数字工程(2021年3期)2021-04-04
中国药学药品知识仓库(2021年13期)2021-01-04
内燃机与配件(2020年8期)2020-09-10
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
无线互联科技(2016年13期)2017-01-10
化学教学(2015年8期)2015-10-15
科技资讯(2015年8期)2015-07-02
科技与创新(2015年8期)2015-05-06
