
PLC在农业智能电机保护系统中的设计应用
2021-09-25 08:45张新军
农业技术与装备 2021年7期
张新军
(济源职业技术学院,河南 济源 459000)
1 PLC在农业智能电机保护系统中的设计
1.1 保护系统总体结构设计
农业智能电机保护系统的总体结构主要由主体模块、显示模块和主体扩展模块[1]三部分构成。另外,控制器是农业智能电机保护系统中的必选部分,主要作用是测量电流、控制电机运行、保护电机工作。显示模块与主体扩展模块是可选模块。显示模块不仅能够显示出多种信息,例如控制器故障、测量结果以及报警,还能修改保护定值、设定系统参数、控制电机运行等。主体扩展模块可以测量电路电压。
1.2 PLC模块设计
农业智能电机保护系统的核心控制部分是PLC模块,由超声波测量设备、电机及其驱动器、PLC控制器、预警、按键、编码器等硬件构成[2]。PLC控制器可直接获取开关量信号,并且获取和传递数字信号,同时接收传感器转换以后的信号。PLC控制器直接控制电机的运行与停止。控制功能可以控制电机的启动方式、行为,还可及时停止农业电机作业,保障安全,快速排查故障。
1.3 软件设计
农业智能电机保护系统中进行监控和测量工作的软件设计。通常情况下,农业智能电机保护器在测量出电路的电流电压数据时,会实施一些常规量保护,比如记录5条故障信息,处理电路中常见的欠压、过压、欠流、过流等问题[3]。在设计保护系统软件的过程中,根据检测到的结果MCU及时更新寄存器信息,再计算出保护数据、分析故障情况、采取保护措施,最后显示在HMI或上位机。
农业智能电机保护系统的远程通讯软件设计。在远程通讯软件中,把保护器设为MODBUS的从机,时刻记录电机的运行状态或控制命令的信息,并将具体数据存储在系统设定的寄存器中。工业的通用标准协议逐渐增多,例如MODBUS、ETHERNET、UART等协议。其中MODBUS协议为通讯协议,应用于OSI七层网络模型应用层,能够完成控制器和控制器之间的通讯,借助网络技术使PLC控制器与其他设备通信。虽然每个厂家生产出来的控制设备型号不一致,但在MODBUS协议的引导下已经构建成一个工业网络,能够实现对数据的集中监控。同时,MODBUS协议设置了统一的消息结构,便于农业机械产品间交换请求数据、侦测错误的记录数据、响应数据等。
1.4 功能设计
农业智能电机保护系统测量功能设计。保护系统需要测量接地故障电流、线电流、线间电压、功率、损耗、电机温度传感器等多种信息[4]。一切保护系统测量到的数据均需要储存在指定的寄存器中,可被用于计算是否需要做出保护。电机电压参数由系统扩展模块测量。电压测量项主要有相电压、电压负载脱落以及欠压过压。电流测量项主要有相电流、长时间启动、短周期循环、超温过载、地漏电流、欠载或过载电流等内容。功率测量项主要有低或高功率因素、欠功率与过功率。
农业智能电机保护系统保护功能设计。农业智能电机主要通过PLC控制器发挥保护作用,检测整个电路的电压和电流,计算各种保护阈值[5]。若系统处于保护状态,则说明某一处的电压或电流或其他保护参数值已经超出了事先设定的范围。在这种情况下,PLC控制器会在控制面板上显示故障信号提示用户,并关闭输出继电器,使农业电机处于停止运行状态。电压保护功能主要表现为电压缺相保护、电压相不平衡保护、自动重启(降压管理)等。电流保护功能最主要是在发生电流反相、长启动、过频启动、电流缺相等问题后,能够有效保护系统及机器。功率保护功能主要为过功率或欠功率因素保护、过功率或欠功率保护。热保护功能主要为定时限热保护、反时限热保护等。
农业智能电机保护系统控制功能设计。保护系统的关键在于控制,控制电机的操作方式、运行模式、解决故障等。电机运行状态由PLC控制器显示、控制与保护,确保电机可做出准备、运行、启动及报警状态。运行模式有双步、过载、双速、可逆形式、正转独立形式5种特定模式,与用户自由编写逻辑控制输出模式。控制模式共有3种,分别是人机操作控制、本地端口控制、远程网络控制。处理故障的方式有手动复位、自动复位、远程复位等。
2 试验分析
2.1 FMEA风险检测
FMEA风险检测需要分析每项农业电机作业有可能产生的故障情况,并预测故障将对系统造成的影响。每种故障分类可依据严重程度、出现频率、检测与修复的难易程度等情况进行划分。容错性质表示部分组件会使系统在故障中继续正常运行。保护系统可设置软件机制或增加硬件设备,检测可能产生异常的固件,并采取相应的保护措施,保障系统安全。系统内在固件产生错误数据或指令,将导致农业智能电机出现异常行为。因此,FMEA风险检测需要对PLC控制系统进行评估,判断失效模式和异常行为,预测对系统产生的影响并制定检测机制与解决方案。
2.2 逻辑应用测试
通过实际操作检验保护系统的逻辑情况,重点测试逻辑文件能否有效控制农业智能电机的行为,并判断系统是否与设计标准一致。第1项测试是FALLBACK模式测试,电机失去信号后会有4种运行模式,分别是HOLD、ON_OFF、OFF_ON、ON,通过独立检测发现电机行为与预期一致,表明系统FALLBACK能有效发挥控制功能。具体测试结果见表1。第2项测试是电压跌落测试。系统瞬间启动恢复的时间范围在0~0.4 s,在电机突然掉电并持续运行时,如果电压可以在设定时间内恢复正常,那么电机能够立刻启动运行。具体延时恢复启动的时间范围在0~300 s,重启时间范围是0~9 999 s。当农业智能电机在运行中突然掉电并依然保持运行时,若电压在规定时间范围内能够恢复,那么电机会在规定重启时间后启动。若电压没有在规定时间范围内恢复,那么系统启动模式将转换为手动重启,人为的启动电机。第3项测试是远程测试与本地测试。系统在远程模式下,若产品接线端口生效且启动键无法发挥作用,那么可以通过停止键终止电机运行。在本地模式下,当远程寄存器难以控制电机时,接线端口与HMI依然可以发挥作用。第四项测试是故障检测。系统出现问题后,农业智能电机1将直接进入停止运行模式,农业智能电机2作为备用设备继续执行命令。当用户发出人为指令“复位”时,电机中的故障信息被消除并恢复系统的原本运行模式,直到下一个出现故障并停机时。
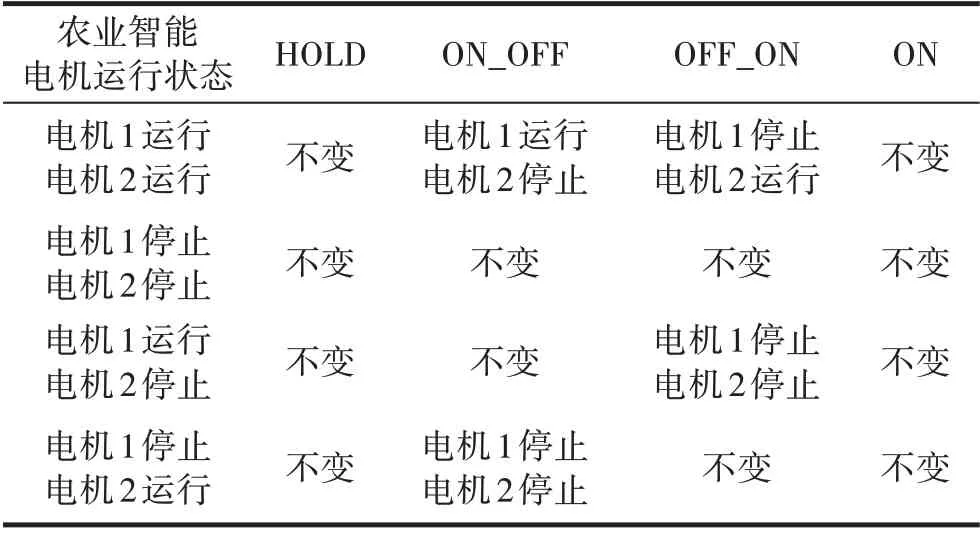
表1 FALLBACK模式测试Tab.1 The FALLBACK mode test
3 结语
针对PLC在农业智能电机保护系统中的设计与应用,本文提出了完整有效的系统设计、检测用例以及测试结果。根据电机的实际运行需求,文章对PLC在农业智能电机保护系统中的总体结构、模块、软件及功能进行设计,在此基础上提出可执行具有可行性的设计方案。此外,对系统进行FMEA风险检测和逻辑应用测试,测试结果显示试验能够为PLC在农业智能电机保护系统中的可靠运行提供科学依据,确保系统稳定工作且在农业智能电机实际运行中可以做到灵活可变。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
网络空间安全(2019年8期)2019-03-18
新课程·中旬(2017年7期)2017-08-13
中学生数理化·高二版(2016年5期)2016-05-14
中学生数理化·高二版(2016年5期)2016-05-14
股市动态分析(2015年24期)2015-09-10
