
综采工作面智能化管理系统的设计与应用研究
2021-09-26 02:51郝立光刘召勇
煤炭与化工 2021年8期
郝立光,刘召勇
(山西东江煤业集团有限公司,山西 吕梁 033200)
1 概 况
东江煤矿正在开采的8 号煤层,煤层厚度2.1~8.1 m,平均4.76 m,煤层的倾角3°~9°,平均5°。东江煤矿综采工作面使用的采煤设备及其配套设备数量和种类众多,主要包括采煤机、液压支架、刮板输送机、转载机、破碎机、皮带输送机、水泵等,这些设备的控制比较分散,设备的管理和控制质量与效率都偏低,导致工人劳动强度大、采煤效率低等,制约了煤矿企业的发展。基于此,东江煤矿拟采用先进的智能化技术对工作面中使用的设备以及整个生产过程进行管理。
2 智能化管理系统整体方案设计
在深入分析东江煤矿综采工作面实际情况的基础上,对智能化管理系统进行了详细的设计,如图1 所示。从图1 中可以看出,整个智能化管理系统网络可以划分成为3 个层级,分别为矿井工作面采煤设备层、单个设备控制系统层、计算机智能化集中控制层。采煤设备除了常见的采煤机、刮板输送机等之外,还包括生产辅助设备包括水泵、通风机等。
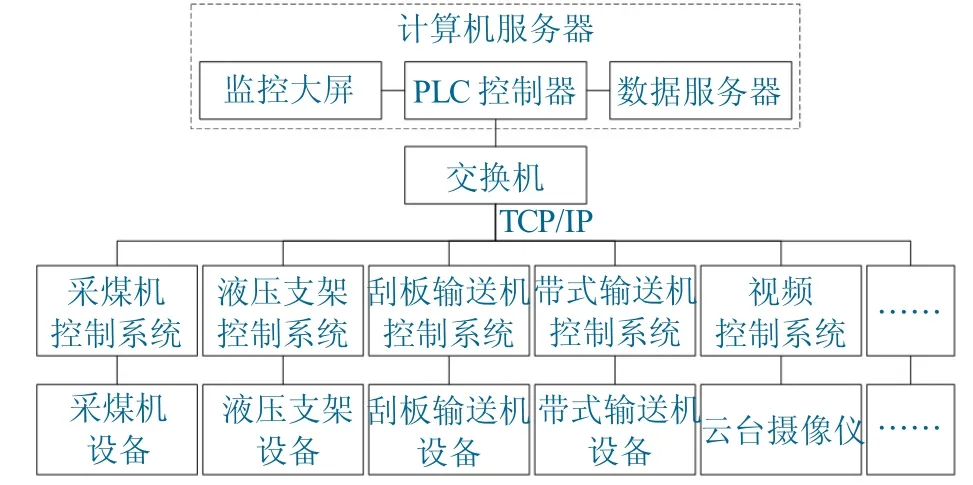
图1 工作面智能化管理系统整体方案Fig. 1 Overall scheme of intelligent management system of working face
为了更好的实现智能化管理控制,对一些重要的采煤设备比如液压支架、采煤机等安装高清摄像头。每种采煤设备或装置都对应有设备控制系统,作用是对设备运行过程中的状态数据进行采集,包括工作时的功率、电压、电流、温度等参数,并对其运行状态进行分析与控制。计算机智能化集中控制层主要包括交换机、计算机服务器等硬件设施,主要作用是对井下各设备控制系统传输上来的数据信息进行综合分析与评判,可以实现井下所有采煤设备及其他辅助装置的集中控制,达到设备之间相互联动的效果。
不同采煤设备之间的距离较远,东江煤矿设备之间的最大距离超过了2 km,对数据信息的传输速度提出了较高要求,管理系统基于TCP/IP 技术进行数据信息的输送,可以将传输延时控制在0.5 s 范围内。计算机服务器需要对多个控制系统进行综合控制,对运算速度和性能提出了一定的要求。管理系统在结合矿井实际情况的基础上,选用西门子公司研制生产的S7- 1200 型PLC 控制器,性能满足要求。
3 智能化管理系统关键技术
3.1 高清视频监控技术
根据智能化管理系统设计需求,需要在综采工作面中布置一系列的高清摄像头,对井下部分重要环节进行全覆盖监控。高清摄像头可以采集矿井下的视频信息,并利用工业以太网将数据信息传输到位于地面的监控中心,画面可以实时呈现在监控屏幕上,对应的数据信息也会存储到数据服务器中,以便调取,达到工作面可视化的效果。本案例中使用的都是云台摄像仪,此类设备不仅具备良好的防爆性能,还可实现角度切换,在水平方向上可以旋转180°,在垂直方向上可以旋转75°。基于先进的软件技术,摄像头可以跟随设备一起移动,实时监控采煤机滚筒截割煤壁以及液压支架移动过程等,达到智能化监控与管理的目的。
3.2 液压支架电液控制技术
在液压支架中布置大量的传感器,对设备运行状态信息进行实时监测。系统可以对液压支架的移架动作、移架顺序、初撑力大小设置等相关过程进行管理与控制,液压支架工作时产生的数据信息会传输到计算机服务器中进行分析和储存。该系统本身具备有故障诊断功能,一旦液压支架存在安全隐患或故障问题,系统可以快速确定故障位置及类型,同时向外发出声音警报。如果故障问题存在比较大的安全隐患,系统则会紧急闭锁,停止设备运行。智能化管理系统可以对某个液压支架进行自动控制,也可对所有的液压支架进行联动控制,也可实现手动控制。液压支架电液控制技术原理如图2所示。

图2 液压支架电液控制技术原理Fig. 2 Principle of electro- hydraulic control technology for hydraulic support
3.3 采煤机的智能化控制技术
在采煤机设备上安装定位传感器和采高传感器等检测装置,可以对采煤机的位置及工作状态进行实时检测,再结合采煤机设备本身的记忆切割功能,可以实现采煤机的智能化管理控制。所述的8号煤层工作面使用的采煤机,设备的前滚筒和后滚筒分别对工作面顶煤和低煤进行切割开采,设备具备有22 象限记忆切割功能,运行过程中产生的轨迹信息、割煤时间以及刀数等都会传输到计算机服务器中进行管理和监管,位于地面的监控中心可以对采煤机进行远程控制,特殊情况下可以通过人工的方式进行控制。
3.4 装备顺序停机控制技术
当综采工作面停止煤矿开采工作时,要求智能化管理系统可以根据设备的实际运行状态按照一定的顺序停机,达到保护采煤设备以及井下供电网络的目的。设计的装备顺序停机控制技术,主要是对各装备的空载作业电流进行检测分析并判断。智能化管理系统启动顺序停机程序,首先对采煤机进行停机处理,确保在源头上没有煤矿物料产生,再对刮板输送机的运行电流进行检测,判断刮板输送机上无载荷后,依次对转载机、破碎机、皮带输送机等设备的运行电流进行检测,直到达到空载电流标准时,停止运行。装备顺序停机控制基本流程如图3 所示。

图3 装备顺序停机控制基本流程Fig. 3 Basic flowof equipment sequence stop control
4 结 语
将设计的工作面智能化管理系统应用到东江煤矿开采实践中,并对实践运行效果进行了连续1 a记录,验证系统设计的合理性。经过实践测试发现,当前该煤矿采煤设备的自动化程度超过了95%,智能化管理系统运行时具有很好的稳定性和可靠性。位于地面的管理人员可以实现井下主要采煤设备的远程控制,实现不同采煤设备之间的联动,井下一旦出现安全隐患,设备之间可以实现联动闭锁。在应用智能化管理系统后,工作面工作人员数量和劳动强度大幅降低,显著提升了矿井的智能化水平,创造了良好的社会和经济效益。
猜你喜欢
防爆电机(2022年1期)2022-02-16
现代仪器与医疗(2021年4期)2021-11-05
中国煤炭工业(2019年3期)2019-08-27
经济技术协作信息(2018年30期)2018-11-22
汽车维护与修理(2016年3期)2016-02-28
橡胶工业(2015年6期)2015-07-29
少先队活动(2014年6期)2015-03-18
河南科技(2014年18期)2014-02-27
河南科技(2014年4期)2014-02-27
汽车与新动力(2014年3期)2014-02-27
