沥青路面养护智能检测与决策综述
2021-10-25 07:41徐鹏祝轩姚丁史长云钱国平于华南
中南大学学报(自然科学版) 2021年7期
徐鹏,祝轩,姚丁,史长云,钱国平,于华南
(长沙理工大学交通运输工程学院,湖南长沙,410114)
《交通强国纲要》指出从2021年开始到本世纪中叶,将分2个阶段推进交通强国建设,公路作为交通运输的重要载体,对推动交通强国发展起到至关重要的作用。截至2021年初,我国高速公路通车约16万km,稳居世界第一,其中,沥青路面公路凭借其养护便捷、行车舒适等优点,在高速公路里程中占比90%以上。沥青路面在服役期间受到交通荷载和各种外界条件共同作用导致路面性状发生变化,通过检测和监测路面在交通荷载、外界气候作用下的性能和状态,并对采集的数据进行处理,分析路面病害状况,对路面健康状态进行评价,据此科学制定路面维修、养护策略。常规的路面检测方法无法揭示路面结构损伤与结构性能劣化的发展历程,难以对路面结构的设计和路用性能评价提供详实的数据支撑,通常无法发现内部缺陷,只有当路面外部出现明显缺陷时才开始维修养护,造成养护成本较高。路面性状智能检测技术能及时发现结构早期损坏和小病害,实现智能化养护决策,有效降低养护成本,避免路面大幅度翻修,减少对交通的影响,具有十分重要的经济效益和社会效益。为此,本文分析国内外沥青路面养护智能检测与决策研究成果及应用现状,对不同沥青路面检测与监测技术、路面病害智能识别技术和沥青路面养护决策方法进行分析,归纳总结沥青路面养护智能检测与决策现阶段研究应用成果,指出沥青路面养护智能检测与决策存在的问题,展望其未来研究面临挑战与发展趋势,以期对沥青路面养护智能检测与决策提供指导与借鉴。
1 沥青路面检测与监测技术
1.1 可视化方法
可视化方法通过研制路面检测工具、技术和系统,将实验或数值计算获得的大量抽象数据转换为人类视觉可以直接感受的计算机图形图像,利用检测数据对路面特征进行精准计算,使路面状况评价结果更全面、准确、可靠。沥青路面检测与监测可视化方法技术主要有摄像机、线扫描照相机、红外照相机、光度立体技术、热红外成像、地面激光扫描等,其技术特点如表1所示,其局限是数据处理计算量比较大,需要有特定的图像处理算法支持,检测精度容易受测量环境影响。各部件技术功能如下。
1)摄像机。摄像机是计算机视觉系统获得三维原始信息的主要工具。随着城市交通的发展,将交通监控系统中前端摄像机作为图像采集单元,技术人员可以直接从影像或者照片中提取各种路面病害,改变以人工巡检为主的路面现场检测方式,缓解因人工检测占据道路对交通流的影响[1-3]。
2)线扫描照相机。线扫描照相机通过一行由感光元素组成的传感器进行高频率扫描,在对高速运动物体进行拍摄时不需要附加额外快门,从而具备高速数据传输速度和效率[4]。在路面检测中通过高速采集道路实时图像获取路面性状。
3)红外照相机。红外照相技术是指通过自动相机系统(如被动式/主动式红外触发相机或定时拍摄相机等)来获取沥青路面图像(如照片和视频),并通过图像分析获取沥青路面性状,为沥青路面检测与监测技术提供参考。CASSELGREN等[5-7]将该技术运用于道路的检测与监测研究。
4)光度立体技术。光度立体方法可以重建出物体表面的法向量以及物体不同表面点的反射率。与传统的几何重建(例如立体匹配)方法不同,光度立体方法不需要考虑图像的匹配问题[8-9],广泛应用于道路工程建设[10-11]。
5)热红外成像。热红外成像仪的工作原理是通过收集物体辐射的红外线,对表面不同部位的辐射强度进行感应、识别,将各点的红外辐射强度转换为红外热图。热红外成像技术具有无接触、无破坏、直观迅速、宽动态测温范围等优点,对物体温度变化敏感,昼夜都可以进行探测[12-14]。
6)地面激光扫描。地面激光扫描技术是利用激光测距的原理,通过记录路面大量密集点的三维坐标、反射率和纹理等信息,快速复建出路面的三维模型。与传统的测量技术相比,地面激光扫描技术具有效率高、细节丰富、智能化等优点[15-17]。CHOI 等[18]用激光扫描图像数据检测路面裂缝。LEHTOMÄKI等[19]基于车辆的激光扫描数据检测道路环境中的垂直杆状物体。
可视化方法主要是通过拍照及录像的方式对路面病害的类型及损坏程度进行采集,而后通过图片和图像的识别技术对路面的破损状况进行识别和解读,以此完成对路面破损状况的快速、定量分析,能直观、实时获取沥青路面表观性状,具有较高精度,但数据处理计算量较大,需要有特定的图像处理算法支持,检测精度容易受测量环境影响。
1.2 雷达
雷达的基本原理是利用电磁波在介质中的传播理论探测目标距离、方位、速度等。地面雷达是以脉冲形式向地下发射电磁波,电磁波在均匀各向同性介质中以电场和磁场相互交替变化的方式,并以一定的速度由近及远传播。当电磁波在传播过程中遇到不同介质时,在介质交界面上就会产生反射、折射,雷达通过接收返回地面的反射波来探测介质层厚度和查找地面下的病害。路面检测中的雷达主要分为探地雷达和相控阵合成孔径雷达。
1)探地雷达。探地雷达(GPR)又称地下雷达或表层穿透雷达,是一种电磁波穿透地下或其他介质的雷达技术。它是利用穿透路面向下发射高频电磁波,由接收天线接收到返回路面的电磁波,其电磁波穿过不同介质层进行反射、折射回波信息,并以一种电性差异接收电磁波的波形、振幅变化等参数,探测地面以下的构造和形态特征,从而最终得到检测的路面厚度和弯沉[20-21]。多功能探地雷达系统与路面检测结果如图1所示。

图1 多功能探地雷达系统与路面检测雷达图[21]Fig.1 Diagram of multifunctional GPR system and pavement detection radar[21]
2)相控阵合成孔径雷达。合成孔径雷达(SAR)是一种高分辨率成像雷达,可以在能见度极低的气象条件下得到类似光学照相的高分辨雷达图像。利用雷达与目标的相对运动,将尺寸较小的真实天线孔径用数据处理的方法合成较大的等效天线孔径。经过几十年的发展,合成孔径雷达技术已比较成熟,并在道路工程建设中得到应用[22-23]。
雷达检测技术具有无损、快速、简易、精度高、全天候等优点。对探地雷达而言,地下物理参数的差异以及周围环境都会影响检测效果,需与勘探工作合理地配合才能充分发挥作用。相控阵雷达设备复杂,造价昂贵,且波束扫描范围有限,当进行全方位监视时,需增加天线阵面数量。
1.3 光纤光栅
光纤布拉格光栅(FBG)传感器的基本理论是通过监测Bragg反射中心波长的偏移来测量应变和温度的变化。当FBG 传感器具有外部温度变化或加载产生变形时,光栅的拉伸或压缩可能导致周期变化[24]。FBG传感技术可用于沥青路面压实的质量控制,也可使用FBG 传感技术监测沥青路面结构响应并评估路面性能[25]。与传统传感技术相比,FBG 传感器具有灵敏度高、结构简单、抵抗电磁干扰和稳定性强等特点,广泛用于工程健康监测[26-28]。现有的传感器通常只能测量沥青路面内部的点应变或表面变形,为此,XU 等[29]开发了一种FBG 传感光束并在实验室进行物理模型试验,如图2所示,发现该光束可以用于测量交通荷载作用下沥青路面的内部变形。董泽蛟等[30-37]利用光纤光栅传感器对多种沥青路面结构应变、温度、施工现场压实进行了应用研究,并在室内对车辙试件应变进行测试。潘勤学等[38]通过现场埋设光纤光栅应变传感器,开展了不同轴载及温度下的沥青路面静载蠕变试验。

图2 FBG传感光束系统[29]Fig.2 FBG sensing beam system[29]
光纤光栅传感探头结构简单、尺寸小、便于埋入复合材料构件及大型建筑物内部,对结构的完整性、安全性、载荷疲劳、损伤程度等状态进行连续实时监测,测量结果具有良好的重复性,适用于测量基于应变和温度变化的静态或准静态物理量,不适用于测量动态信号(如振动信号)和湿度、风速等信号。光纤光栅作为一种小尺寸、高模量的结构应变监测传感器,难以与沥青路面结构应变协同,且传感器和解调设备不便于现场调试,抗振及耐腐蚀性有限,容易受路面耐久性能的影响。
1.4 声学技术
声学是指研究机械波的产生、传播、接收和效应的科学,声学技术主要测量声速和声衰减以研究物质特性。用于路面检测的声学技术主要包括声发射和超声波。
1)声发射(AE)。声发射作为一种无损检测方法,可以有效检测各种材料中的细微损伤。其基本原理是从声发射源发射的弹性波最终传播到达材料的表面,引起可以用声发射传感器探测的表面位移,这些探测器将材料的机械振动转换为电信号,然后再次被放大、处理和记录。声发射技术已广泛用于岩石、混凝土、钢和桥梁结构的损伤检测和评估[39]。HILL等[40]使用AE参数分析热负荷下的热拌沥青混合料的力学性能。APEAGYEI[41]使用AE技术评估了泡沫沥青的稳定性,采用的声发射实验装置如图3所示。BEHNIA等[42-43]基于AE参数评估了沥青结合料的低温脆性,并基于AE特性监测和评估了3种不同老化水平的沥青混合料的低温开裂行为。SUN等[44]使用AE技术评估了沥青结合料和混合物的低温开裂敏感性、氧化老化、脆化温度以及热裂纹的位置。JIAO等[45]利用AE技术评价了多孔沥青混合料在不同温度下的压缩和劈裂试验中的断裂过程。

图3 声发射实验装置示意图[41]Fig.3 Schematic representation of AE experimental setup[41]
2)超声波。超声波测试技术是近年来发展非常迅速的一项技术,它是利用激发换能器在材料表面激发出高频弹性波,发送到材料介质中。这种高频弹性波经过材料结构内部时,遇到声阻抗不同的介质会发生反射、散射,经过材料结构内部的波最后由接收换能器接收,通过对接收的信号分析处理,判断材料内部是否存在缺陷[46-47]。QIU 等[48]建立超声波波速与沥青混凝土的抗压强度、抗弯强度和静态模量等拟合关系,实现沥青混凝土性能的预测和评估。顾兴宇等[49]分析了不同入射频率下沥青混凝土中超声波细观的衰减特征及宏观的振幅变化,研究了不同集料粒径和温度对沥青混凝土中超声波衰减的影响。
声学技术不需要直接接触检测对象,与一般检测方法相比,在高低温、核辐射、易燃、易爆、有毒等严苛环境下具有较大优势,由于对构件的几何形状不敏感,适用于形状复杂构件的检测。声学技术对材料较敏感,且易受机电噪声干扰,因而,对数据的正确解释要有更丰富的数据库和现场检测经验,通常需依赖于其他无损检测方法进行复验。
1.5 振动技术
道路性状调查中最常用的振动测量工具包括加速度计、基于智能手机的传感系统。
1)加速度计。加速度计是一种惯性传感器,用于探测1~3 个垂直方向上测量点的速度。RYYNÄNEN 等[50]发现用于连续监测的最好的传感器是加速度计。利用测量的加速度信号经重力校正后,再对该信号进行积分得到位移,如图4所示。ARRAIGADA 等[51]使用加速度计测量路面的挠度,并使用黏弹性路面模型对用偏转仪获得的测量结果进行拟合。

图4 利用加速度计测量加速度、位移与时间的关系[50]Fig.4 Relationship among acceleration,displacement and time obtained by accelerometer[50]
2)基于智能手机的传感系统。目前,研究人员使用智能手机搭载的移动传感系统和全球定位系统(GPS)来检测路面状况[52-53]。使用手机进行路面评估被视为一种调查道路状况的众源方法[54]。BUTTLAR 等[52-53,55]利用移动应用(APP)进一步扩展了智能手机加速计在道路状况检测中的应用。
使用智能手机测量路面状况具有设备简单、操作便捷、成本低廉等优点,但也存在一些不足,主要表现在智能手机在车内仪表盘上的位置无法准确反映真实路况;此外,由于轮胎补偿造成数据收集准确性较低,降低了移动应用程序的总振动响应[55-56],同时,还需考虑数据采集的频率。
2 路面病害智能识别
随着通车长度和交通量增加,道路养护任务越来越繁重,尤其是道路病害检测和识别任务特别紧迫。道路病害智能检测本质上是对病害实现二维或三维成像和识别,成像条件是随机的,而图像识别取决于算法。测量坑槽等需要在合理空间下获得较好的成像效果,而裂缝等评估则需要在局部范围内获取非常精确的成像,这2种极端情况为成像技术和识别算法带来了挑战。目前,国内外学者主要通过振动传感、遥感、激光、摩擦因数检测、纹理识别、GPS 和图像识别等技术对路面病害进行智能识别。路面病害智能检测流程如图5所示,通过综合运用相关技术对路面平整度、抗滑性能、车辙、裂缝等常见病害进行智能化检测。

图5 路面病害智能检测Fig.5 Intelligent detection of pavement diseases
2.1 平整度检测技术
平整度是道路表面相对于理想平面的竖向偏差,是衡量路面质量与评价行车舒适度的重要指标。目前,国内外学者主要通过位移传感技术、振动传感技术和遥感技术等手段评价路面平整度。马荣贵等[57]提出了基于基准传递原理的路面平整度检测方法,通过激光位移传感器检测路面纵断面相对标高,可获得被测道路的纵断面曲线和国际平整度指数(IRI)。吴秉军等[58]提出了一种基于路面高程自动测量的全断面平整度计算方法,利用自动跟踪全站仪、激光测距传感器和倾角仪等装置测量路面高程,根据测得的路面点三维坐标信息,可计算出任意纵断面的IRI,能够实现路面全断面、高精度平整度检测及平整度缺陷位置的精确定位。毛庆洲等[59]基于小波变换原理的路面平整度测量数据精确处理的算法有效获取车体振动位移来补偿激光测距,得到完整的路面相对高程,最后得到路面IRI。王大为等[60]介绍了基于功率谱密度曲线的平均不平整指数(AUN),分析了将功率谱密度曲线转化为高度-波长曲线的优点,并考虑了人车振动反应的有效平整度指数(LWI)。许哲谱等[61]提出了一种基于核密度估计的沥青路面状况动态分段方法,该方法基于快速检测设备获取精细的路况数据,利用线要素核密度对路面破损率、国际平整度指数和车辙深度进行分析,得到以核密度为指标的连续变化路况地图,建立了以核密度为指标的路况评价标准。江东等[62]采用磁悬浮振动测量方法,利用汽车在行驶过程中的振动实现对路面平整度的测量。杜豫川等[63]采用功率谱密度分析方法,提出了一种利用车内簧载竖向加速度推算IRI的理论模型,开发了一套基于多个加速度传感器和GPS 的路面平整度检测原型系统。GARILLI 等[64]基于无人飞行器(UAV)摄影测量法,对路面的平整度进行了评价。高仁强等[65]利用低空无人机LiDAR(light detection and ranging)遥感技术获取点云与影像数据,获得了精细的三维地形表面模型,在此基础上选用国际平整度指数对路面平整度的空间进行可视化表达,并依据平整度进行分等定级,从而实现对路面质量进行评价。
2.2 路面抗滑性能检测技术
良好的路面抗滑性能为高速行驶的车辆提供足够大的摩擦力,保证车辆行驶过程中的安全性、舒适性。目前国内外学者主要通过摩擦仪、激光测距传感器和三维纹理仪等对路面摩擦因数、构造深度和路表纹理等指标进行定量评价。郑木莲等[66]利用SAFEGATE摩擦因数测试车测定路面抗滑性能。WASILEWSKA 等[67]利用防滑阻力测试仪和摩擦力观测仪测试抗滑力,进而对路面抗滑性能进行评估。窦光武[68]为评价路面抗滑性能,采用高精度激光测距传感器对路面构造深度进行测量。冯兴乐等[69]基于激光视觉测量方法得到的沥青路面点云数据,进一步采用断面法估算构造深度来反映抗滑性能。周兴林等[70]基于激光视觉法测量了沥青路面的构造深度,通过图像处理方法估算了路面断面深度(MPD)进而评价路面抗滑性能。钱振东等[71]用数字图像处理技术重构车辙板表面三维纹理模型,通过差分盒维数法计算三维纹理模型的分形维数,研究了分形维数与抗滑性能的关系。UECKERMANN 等[72]基于光学纹理测量的非接触式防滑电阻对路面纹理进行测量以评价路面抗滑性能。NEJAD 等[73]基于图像的自动系统通过自动图像获取系统(IAS)捕获路面纹理图像对路面抗滑性能进行评估。LIANG 等[74]基于三维检测系统中点云数据生成路面纹理的3-D虚拟模型来计算平均纹理深度(MTD),评估路面抗滑性能。CUI等[75]基于多线激光和双目视觉技术对沥青路面平均纹理深度进行测量,引入了多线激光配对和极线约束技术,以实现多线激光与双目视觉之间的图像匹配,依次算出沥青路面平均轮廓深度。马林等[76]采用高精度压力胶片测试技术测试了路面-轮胎接触应力分布,在此基础上对路面的抗滑性能进行检测。
2.3 路面车辙检测技术
车辙是指沥青路面在长期车辆重复荷载作用下,沥青面层产生的永久变形,是沥青路面的最常见的病害之一。目前国内外学者主要通过GPS和三维激光仪等对沥青路面车辙等病害进行检测。马荣贵等[77]基于GPS横断面车辙数据对路面进行三维重构,在三维空间中构造出用于绘制三角形网格的顶点矩阵,用于评价路面车辙、坑槽及拥包等。JANG等[78]通过三轴加速度计和GPS传感器收集路面数据以检测路面车辙和坑槽等病害。郎洪等[79]通过对三维图像中激光点异常值进行筛选,利用横断面深度数据运用包络线算法提取车辙、坑槽和拥包等检测数据。李清泉等[80]利用激光三角法快速准确地检测路面车辙。陈小宇等[81]基于激光三角剖分的快速检测路面车辙技术,有效和可靠地测量路面车辙。李中轶等[82]通过改进Canny算法对2D/3D激光点云数据进行识别定位,能连续精准测量车辙宽度、最大深度以及在车道内的横向位置。洪梓铭等[83]采用激光器向路面连续发射线激光,通过高分辨率相机动态获取路面车辙激光线的序列图像,对路面车辙进行实时检测。AREZOUMAND 等[84]使用线性激光和高速射击运动相机以检测静态和动态模式下的车辙深度。LUO 等[85]使用3D 线扫描激光系统和惯性测量单元(IMU)对路面车辙尺寸和横向位置进行测量。丁梦华等[86]基于高密度数据和聚类分析的独立车辙识别和评价方法,有效和准确地判别车辙的严重程度及分布位置。JAHANSHAHI等[87]使用RGB-D传感器来检测和量化路面中坑槽和裂缝等病害。
2.4 路面裂缝检测技术
路面裂缝自动化检测主要包括图像获取、图像处理和图像分析。目前,国内外学者主要研究集中于改变算法提高图像的识别精度等方面,也有少部分学者通过加装图像获取设备或在路面上铺设光纤等来检测裂缝,但此类模式成本较高。李刚等[88]基于改进的轻量级全局卷积网络的路面裂缝图像分割模型对裂缝进行采集,并计算裂缝平均宽度,提高了裂缝识别的准确性。侯越等[89]利用卷积自编码(CAE)方法增强路面裂缝图像数据,图片样本更易被机器识别。ZHANG 等[90]基于Crack Net‐R 的递归神经网络(RNN)算法,对测试路面裂缝图像进行识别。陈泽斌等[91]基于改进后的U-net模型实现对路面裂缝图像精准自动识别。王保宪等[92]基于图像高维特征压缩映射的混凝土表面裂缝检测算法提高了裂缝识别的速率和准确率。ABDELLATIF 等[93]分析了高光谱裂缝图像的光谱敏感,计算了裂缝指数,发现该指数可作为路面裂纹评价指标。王世芳等[94]基于多尺度脊边缘的沥青路面裂缝检测算法,对不同形状特征、尺寸和位置的裂缝目标进行有效检测,具有较高的检测精度和较好的检测效果,且该算法抗噪性能好。王博等[95]利用显著性分析的边缘检测算法识别航拍图像的路面裂缝片段,自动筛选存在裂缝的图像。XIANG 等[96]使用编码器-解码器体系结构构建网络,并采用金字塔模块来拓扑裂缝的复杂结构,可准确识别裂纹特征。YANG等[97]基于机器视觉领域深度学习的概念,提出一种用于路面裂缝检测的特征金字塔分层增强网络。QIN等[98]基于正方形边界框对角线匹配的裂纹分类方法,对裂缝进行快速分类处理。KADDAH 等[99]在车辆上安装几种不同系统用于检测道路裂缝,所获结果非常可靠且精确。宋宏勋等[100]基于双相机立体摄像测量的路面损坏裂缝快速识别方法,运用2台面阵相机对路面同一物点建立2台相机之间的映射关系,实现路面裂缝图像的快速识别。MEI 等[101]介绍了一种利用运动摄像机和深度神经网络进行低成本道路检测的方案,基于深度学习网络提出一种道路裂缝检测的ConnCrack 算法。YI 等[102]通过光纤传感器对混凝土路面裂缝进行检测。GAO 等[103]基于快速区域卷积神经网络(faster R-ConvNet),通过使用探地雷达(GPR)对路面的反射裂缝和不均匀沉降等进行检测。
3 沥青路面养护决策
公路路面养护管理系统决策优化的核心在于如何在道路性能和服务水平不下降的情况下制定最小的预算资金方案,由此确定具体养护决策,使得道路路面的养护资金和养护质量达到最优平衡。随着信息技术的发展,沥青路面养护决策智能化程度不断提高。基于现有的路面养护管理系统,引入预防性养护、人工智能和大数据分析等先进的养护概念及分析手段,能够有效提高常规养护管理工作中对路面病害识别、道路服役性能评估效率,对优化多指标决策体系以及开展系统性养护决策起推动作用。
3.1 传统路面养护管理系统
传统沥青路面养护管理决策在很大程度上是基于路面使用性能来进行判断,目前最常见的养护措施决策方法是决策树法,通过引入一个沥青路面技术状况的综合评价指标(路面使用性能指数PQI、路面损坏状况指数PCI等),结合各路况专项检测数据、交通荷载、气候环境和施工质量等因素分级权重,利用评价指标的触发值对病害进行分级,实现对路面检测性能的综合判断及评价,进而将各评定路段划分为日常养护、预防性养护、修复养护、专项养护和应急养护等类型。这种决策方法具有数据易采集、评价模型简单、分项指标明确等优点,但该方法也存在边界值模糊、不同评价指标差异大、难以准确界定养护类型等缺陷。
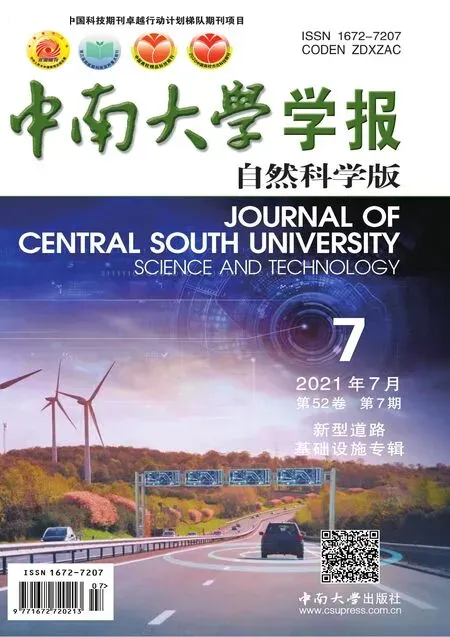
20世纪70年代,美国和加拿大提出了路面管理系统(pavement management system,PMS)的概念[104]。1980年,亚利桑那州交通部开发了网级路面决策优化系统,将马尔可夫过程的路面性能预测与线性模型相结合,对公路养护方案进行了优化[105]。1983年,美国陆军建筑工程研究所开发了PAVER 路面管理系统,根据路面损害程度对路面状况折减扣分,提出了路面损坏状况指数PCI(pavement condition index)[106]。曾胜等[107]分析养护工程性质、养护决策影响因素,建立了高速公路沥青路面养护决策树模型,如图6所示。王端宜等[108]基于PAVERTM路面管理系统研究了路面路网的养护需求,建立了考虑路面养护资金优化的路网养护维修方法。ZIMMERMAN 等[109]对决策树法进行了改进,增加了车流量和环境条件等因素来完善路面使用状况的综合评价。FAN 等[110]运用随机线性规划方法选择最优养护方案,提出了一种在预算不确定性下的路面养护决策方法,研究了预算对优化解决方案的影响。ARABALI等[111]研究了机场道路的养护决策过程,根据气候和机场类别划分了不同的决策组,并对每一组进行了成本效益最优决策处理。ZHANG等[112]运用生命周期优化模型确定出网级公路的近似最优养护对策,并利用地理信息系统(geographic information system,GIS)模型建立了网络级路面资产管理系统。JING等[113]分析了BIM 技术在公路养护管理系统的应用可行性,认为BIM 技术能够有效提升养护决策的信息化和精细化。
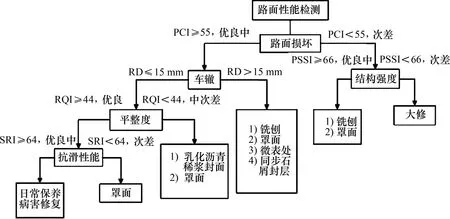
图6 沥青路面养护决策树模型[107]Fig.6 Decision tree model of asphalt pavement maintenance[107]
3.2 沥青路面预防性养护决策
常规的沥青路面养护通常是针对于路面已产生的病害进行修复或补强,不仅维修滞后,而且养护费用高,建设工程量大。近年来,路面预防性养护的概念已得到广泛认可,预防性养护是指原路状况良好、尚未发生结构性损坏、仅对其功能性或使用性进行养护加强的养护活动。预防性养护措施决策是预防性养护的核心内容,也是实现预防性养护的最终表现形式。目前,沥青路面预防性养护措施方法主要包括费用效益分析法、寿命周期费用法、决策树决策矩阵法、综合评价法、聚类分析法和层次分析法等。不同方法各有其特点及局限性,其实施效果也会受到路面状况、交通条件和自然气候等因素影响[114]。预防性养护措施决策的选择应该根据路面条件、外部环境和资金状况,科学开展预防性养护措施决策,以有效提升路面性能,延长路面寿命以及节省养护资金。一种典型的路面预防性养护措施确定流程见图7。

图7 路面预防性养护措施确定流程[114]Fig.7 Determination process of pavement preventive maintenance measures[114]
王朝晖等[115]考虑不同时间与不同对策组合的多种预防性养护方案,建立了基于重构数据包络分析方法(DEA)的预防性养护时机和对策一体优化模型。王向峰等[116]结合路面状况指标阈值和路面损坏状况指数PCI衰减趋势,综合判断路面预防性养护时机。FRANCE-MENSAH 等[117]基于GIS 构建了道路预防性养护管理系统,并利用工作流实例验证了框架的可用性和有效性。樊旭英等[118]从路用性能和沥青性能2个方面对沥青路面预养护进行评价,并对传统熵权-层次分析法进行了改进。JIA等[119]利用长期路面性能计划项目(LTPP)收集的数据,提取了平整度、车辙和裂缝等路面性能指标,评估预防性养护处理对维持路面性能的长期有效性。张春安等[120]提出采用费用-效益费评价准则确定预防性养护决策评价方法,通过建立层次分析法(AHP)的三层评价体系结构进行指标选择和权重计算。董元帅等[121]基于寿命周期分析法(LCA)对高等级公路沥青路面养护在寿命周期内的效果进行计算,对费用、能耗与环境影响等进行分析,认为在较好的路况标准下,开展预防性养护能够获得最大的综合效益。施彦等[122]提出了同时考虑路面使用性能综合指标和病害情况单项指标的预防性养护评判标准,分析了重构优化DEA 方法和区间数TOPSIS方法的决策流程。WANG等[123]基于BIM 技术构建了沥青路面预防性养护模型,采用层次分析法确定了预防性养护措施。LIU等[124]结合层次分析法和模糊数学理论,建立了沥青路面模糊综合评价模型,对预防性养护措施进行了排序优化。
3.3 基于大数据统计分析的沥青路面养护
长期以来,路面养护管理依赖“车载人走”的排查方式,巡查结果缺乏可量化、直观化的管理及呈现方式,造成日常路面养护数据无法有效积累和沉淀,公路管理部门难以全面、及时地掌握公路日常技术状况。基于大数据分析的道路养护,其出发点是基于规模巨大的道路监测数据建立管理数据库,深入挖掘各种数据之间的内在关系,统计、分析、预测道路服役性能与服役寿命,为道路养护决策提供更好的辅助服务。
汪海年等[125]基于国内高速公路车辙数据,采用数理统计方法对MEPDG车辙预估模型进行了校正,提高了模型预测精度。苏卫国等[126]通过构建PQI(见图8),并基于高速公路的PQI数据建立了灰色预测模型。靳明等[127]基于灰色系统理论建立了路面使用性能预测模型,并依据预测结果给出了相对应的养护决策方案。赵静等[128]提出了灰色关联度分析和支持向量机回归(GRA-SVR)的沥青路面使用性能预测模型,为大数据养护决策提供了参考和依据。崔玉姣等[129]以路面检测数据为样本,采用主成分-聚类分析法对高速公路沥青路面养护路段进行了划分,划分结果有助于制定科学的养护决策。HAN 等[130]结合灰色关联分析和层次分析法,提出了一种改进加权随机森林算法的沥青路面养护决策方法。IRFAN 等[131]基于数据挖掘算法开发道路养护优化模型,利用GIS技术实现与决策支持系统的应用集成。HADJIDEMETRIOU 等[132]开发了考虑交通数据的路面养护决策模型,基于路面和交通数据对路面养护优先顺序进行了量化分级。SANTOS 等[133]基于模糊数学理论研究了路面维修养护决策中的多目标优化问题,分析了多目标不同权重下的决策变化。
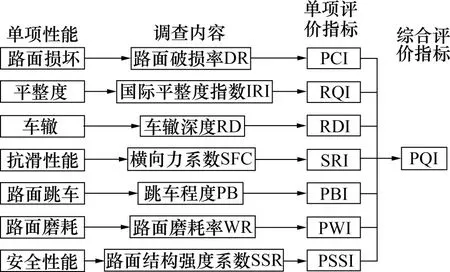
图8 路面性能评价指标体系[126]Fig.8 Pavement performance evaluation index system[126]
传统的项目级沥青路面养护决策方法通常由养护工程师根据现场路况制定,不仅效率较低,而且对巡查人员经验依赖程度较高,主观性较强。随着人工智能的迅速发展和广泛应用,道路养护与管理进入了新阶段。人工智能属于计算机科学的一个分支,其强大的特征学习和分类能力适用于图像分类、目标检测、图像语义分割等领域。基于人工智能的道路养护,其基本思路是应用神经网络、深度学习(卷积神经网络)、专家系统等各种人工智能的方法手段,对道路病害、道路服役性能、道路养护策略等进行全自动分析,实现道路高效养护管理与运营服务。
黄雅杭等[134]基于路面管理系统(CPMS)数据库,开发了宁夏地区沥青路面养护专家系统。程珊珊等[135]结合现代人工智能的发展,对专家系统在路面养护管理中的应用进行了分析和展望。汪凡等[136]研究了BP神经网络在路面性能预测中的应用,认为需要定期检测路况获取大量样本数据来训练BP 神经网络模型,以保证预测的准确性。BELTRAN等[137]提出通过人工神经网络模型来反算沥青路面结构层模量,进而对路面力学性能进行预测评估,并从预测可靠性和预测效率2个方面评价了神经网络模型的有效性。MAZARI 等[138]基于LTPP 提取的路面平整度,利用人工神经网络开发了路面平整度预测模型。陈仕周等[139]通过遗传算法(GA)对传统模型进行组合优化,提出了一种用于预测路面使用性能的GA-灰色神经网络模型。WANG等[140]结合马尔科夫链和BP神经网络建立了组合预测模型,认为神经网络方法可以有效解决道路性能评价中的数据不足和准确性较低问题。PARK等[141]提出了一种基于深度学习模型的路表裂纹检测方法,通过分析路面图像的patch 单元中的裂缝信息(见图9)来训练模型,实现了裂缝信息的自动提取。MAHMOOD等[142]以路面区域和养护效果为输入变量,以PCI为输出变量,建立了人工神经网络的多输入统一预测模型,与路面管理系统相结合提高养护决策的有效性。YAO 等[143]采用深度强化学习算法,通过反复试错来得到更好的道路养护与维修策略,使维修决策的长期成本效益最大化。深度学习模型创建过程见图10。

图9 用于训练裂缝检测模型的数据生成过程[141]Fig.9 Data generation process for training crack detection model[141]

图10 深度学习示意模型[143]Fig.10 Model of deep learning[143]
4 发展与展望
4.1 沥青路面检测与监测技术问题与发展
沥青路面养护维修的关键在于对其路用性能进行准确测量和评估。随着感知元件技术的发展,体积小、精度高、成本低、用途广的感知元件越来越多地用于路面信息感知。此外,湿度、应力、应变等多种类传感器在路面信息获取中发挥重要作用。但目前传感硬件技术在精度、敏感性方面仍存在不足,由于路面耐久性不足,埋设的传感器容易发生损坏,降低了使用的可靠性,监测数据使用效率低,信息整合度不高,数据挖掘还不够深入。随着科学技术进步,传感器将向微小型化、系统化、智能化方向继续发展,为沥青路面检测与监测提供了有力技术保障。
4.2 路面病害智能识别问题与发展
目前人们对路面病害智能识别技术的研究已取得丰硕成果,但病害智能识别技术大多只能识别单一类型的病害,尚待开发具备多种病害识别能力的一体机。公路属于跨地域的带状构造物,路面病害从发生到发展是一个跨时域的过程,目前实现全过程的路面智能检测技术鲜有报道。随着微传感技术、高清图像技术、北斗定位系统和计算机技术等飞速发展,有望能开发病害智能识别一体机对全过程路面病害进行监测,深入路面材料结构内部,对病害的源头进行直观表征,为路面材料优化设计提供科学依据。
4.3 沥青路面养护决策问题与发展
人工智能方法和大数据分析手段已广泛应用于沥青路面养护决策,对道路病害识别、道路服役性能评价、道路养护策略优化等领域进行全自动高效分析,深入挖掘各种监测数据之间的内在关系,统计、分析、预测道路服役性能与服役寿命,为路面养护决策提供更好的辅助服务。当前普遍利用神经网络、机器学习等人工智能技术建立路面病害识别模型,需要大量格式统一、高质量、开放性的检测和监测数据数据库提供训练样本,同时,也需要开发适合行业特点的路面养护小数据集深度学习算法、适用于现场养护的通用型快速智能学习算法及平台等,以更好地支撑、服务交通强国背景下的沥青路面智能养护。
猜你喜欢
建材发展导向(2022年23期)2022-12-22
今日农业(2022年3期)2022-06-05
商品与质量(2021年43期)2022-01-18
今日农业(2021年8期)2021-11-28
烟台果树(2021年2期)2021-07-21
西部交通科技(2021年9期)2021-01-11
西部交通科技(2021年9期)2021-01-11
今日农业(2020年19期)2020-11-06
华人时刊(2016年19期)2016-04-05
专用汽车(2015年4期)2015-03-01