
挖掘机配重重心自动检测装置设计
2021-10-25 02:28陈军
电子测试 2021年19期
陈军
(安徽理工大学机械工程分院,安徽淮南,232001)
0 引言
重心高度影响挖掘机操纵稳定性、平顺性和安全性的重要指标。虽然挖掘机制造商通常会提供空载时挖掘机的相关参数,但当挖掘机的负荷变化显著时,会改变挖掘机的重心。重心高度过高时,就会导致挖掘机在挖掘作业时,容易发生倾倒的风险,发生安全事故和财产的损失,重心的位置是结构设计中需要考虑的参数指标,提高挖掘机配重的合格率,那么就可以避免事故。因此,急需一种能够通过检测平台快速/准确的测量大型结构件高度的检测设备。
1 重心测量原理
1.1 重心测量方法现状
在国外,他们很早就开始对大型结构的重心位置和位置的研究价值进行了深入研究,一些代表性的案例一般来自欧美等一些发达国家,比如对航天航空产品和一些交通工具的重心位置,这些研究案例完美的阐述了重心研究在结构设计的重要意义。
本文介绍了一种可以通过翻转加静态测量的方法模拟重心位置,并且通过多个传感器数值进行模拟计算,最终得到重心的具体坐标。
由于操作方法简单,人为干预因素少,测量结果精度高,检测速度快,可倾斜平台法被广泛使用。
1.2 重心测量方法的原理设计研究
利用可倾斜平台法测量配重重心,其测量示意见图1。挖掘机的配重结构较为简单,通过结构外形大小设计测量平台尺寸。根据可倾斜平台法的原理,利用称重传感器支撑设备结构,并测量出配重处于水平姿态和倾斜姿态时的各个传感器测得的支撑力,下文中具体介绍了重心位置的具体计算思路和计算公式,其中如要思想是通过力矩平衡的方法假设重心位置后,通过数值模拟进行反推。
由图1 可知,图中左侧是翻转前的位置坐标系,翻转前重心向平台上侧的投影点的位置和建立的原点位置,相对距离就是检测结果中的x、y 坐标,x、y 坐标的数值影响重心对整个结构的偏差影响比较大,比如x 较大时候,安装好的挖掘机就会有向一侧倾倒的趋势,因此x的数值偏差较大会导致挖掘机结构的平衡性差,通过图1 右侧的反转效果显示,在构建好的坐标系中,重心在坐标系上的投影会随着设备翻转而移动,设备翻转的角度、物体重心的高度和重心移动的距离成一定的三角函数关系,通过三角函数转换,可以计算出物体的重心高度Z。
在水平姿态时,配重重心坐标值在两个坐标系下的关系如下:
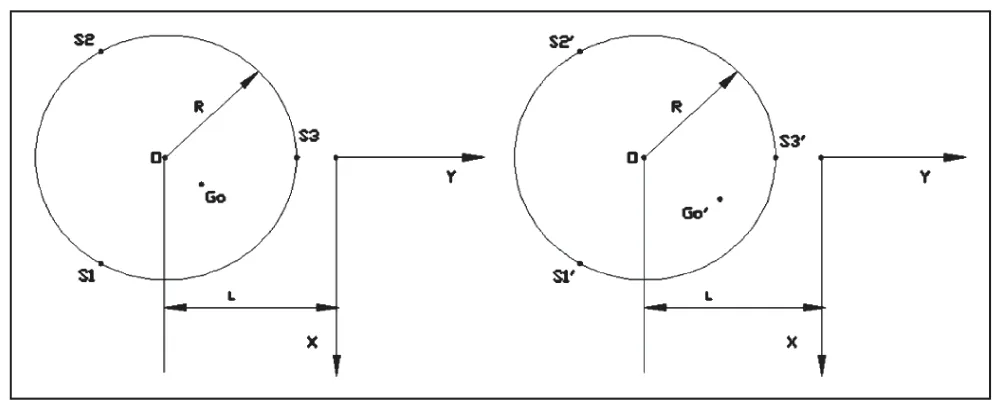
图2 重心投影示意图
在倾斜姿态时,翻转盘发生了θ的倾转,配重重心坐标值在两个坐标系下的 关系如下:
建立求解方程的主要原理是力矩平衡原理,确定物体是平衡状态,确定各方向的作用力投影之和及产生的力矩之和均为零,所得基本方程为:

需要确定主要的测量力是由称重传感器进行传递的,一共有3 只或4 只,4 只承重传感器检测原理和三只相同,对这些传感器进行编号及分析最终为获得的力为Fi(i=1,2,3,4),其位置坐标为(xi,yi)(i=1,2,3,4)。可将式子(4),具化为式(5):
式中:
G 为挖掘机重力,单位为N;
(x0,y0)为测量的重心坐标,单位为mm;
F01,F02,F03,F04为测量加载前的传感器的输出力值,单位为N;
F1,F2,F3,F4为测量加载后的传感器的输出力值,单位为N;
x1,x2,x3,x4为四只传感器的x 轴位置,单位为mm;
y1,y2,y3,y4为四只传感器的y 轴位置,单位为mm。
依据(6)可以得到倾斜平台后的重心坐标为:
考虑前面的倾斜原理,这里将发生的具体结构进行细化可得图3 所示,可以得到整理的坐标值。图3 中的y 坐标不发生改变。

为了消除测量装置本身对测量的影啊,上述所需的测量量,为对测量装置自重清零后得到结果。
2 重心测量平台设计
2.1 重心测量平台概述
为了研制挖掘机配重重心测量试验平台,本文通过对国内外各家单位设计的重心测量设备进行功能分解,确定了本文要硏制的挖掘机配重重心测量试验平台的研制方案,确定了挖掘机配重重心测量试验平台,由机械系统、传感检测与控制系统和其他辅助结构组成。
重心检测平台主要可分为翻转盘和固定盘,翻转盘上安装配重壳体和定位夹紧机构,固定盘与振动平台接触,其下部装有导向柱座,翻转盘和固定盘之间通过气缸或者油缸实现相对倾转,其中液压油缸比较适合大型配重的反转需求,液压有较大的推力和稳定性[6]。重心测量平台结构如图4 所示。定位机构和夹紧机构用来固定配重壳体的位置(未在图中展示)。

图4 重心测量平台结构如图
2.2 机械系统方案
重心测量试验平台机械系统的功能进行分解,针对各个功能,研究可行的方案。通过分析各个单位采用多点衡重法设计的测量设备可以看出,针对不同的测量对象,各个单位设计的测量装置具体结枃差异很大,从机械结构原理上归纳,大体包括:测量平台水平调节机构、基础底座、被测物体限位机构、传动机构等。以下,本文针对重心测量试验平台机械本体结构,按部件分别阐述其设计思路和具体分析。
(1)测量平台水平
重心测量过程中,为了保证重心测量的准确性,必须保证本文所建立测量平台坐标系与大地坐标系一致。这就需要利用水平调节机构来调整测量平台坐标系下的X 轴和y 轴与水平面平行,Z 轴垂直于水平面。利用调平垫铁来实现测量平台基础底座的水平高度的调节,配合分度值为2mm的框式水平仪作为水平调节基准,将测量平台坐标系与大地坐标系调整到一致。调平垫铁如图5 所示。

图5 调平垫铁
(2)测量平台角度调节
实现配重重心三坐标位置的精确测量,必须在测量过程中使翻转盘与配重一起相对固定盘倾转一定的角度,待系统稳定后测量各个传感器压力值。测量完成后,需将翻转盘和配重恢复至水平姿态。因此,需要设计一种可以完成测量装置倾转运动过程中翻转的角度值,因此需要一种具有较大推力且工作可靠的动力装置来作为测量装置倾转的动力源。
本文选用液压油缸来实现重心测量平台翻转盘的倾转运动。液压油缸有较大的推力和较高的控制精度可以满足使用需求。
(3)测量平台基础底座
测量平台基础底座是结构设计的重要一环,通过多种方案的分析比较,考虑结构强度刚度的同时,因为需要测量重心的结构件多种多样,因此测量平台基础底座的表面需要具有安装多种工装的多功能设计,同时测量平台基础底座的底侧需要安装四个压力传感器,测量平台基础底座的本身重心位置会影响四个传感器的数值精确性,同时考虑到需要进行翻转运动,因此需要安装油缸和转动轴,转动轴的位置处安装了角度编码器,整个结构的设计需要考虑变形对传感数值的影响。
(4)定位夹紧装置
定位夹紧机构,简称“工装”,工装在机械领域十分常见,它保证了工业生产的正常进行。在挖掘机配重测量过程中同样需要可靠的定位夹紧,配合测量配重重心的需要,在测量时翻转上平台与配重重心的相对位置必须固定,可以理解为传感器一般安装在某一固定位置,而配重也必须安装在上平台上面的某个固定的位置。
3 重心测量系统软件设计
我们更具检测方案设计了一款重心测量系统软件,通过软件可以实现对传输过来的一些模态值进行分析计算和补偿,测量的重心测量要求一定要显示出重心的位置与高度,重心高度不平衡,会影响工作质量和使用寿命[3],测量过程函数模块如图6 所示。
3.1 数据采集模块
软件系统应采集模块的动态链接库,在plc 程序编制中,需要根据传感器连接变送器,将传感器的模态量信号输出采集到plc 内。
3.2 重量计算
称重传感器的原理是放置上的结构件导致传感器移动块位移,改变内部结构阻值,从而实现对重量的计算,在没有放上配重前,整个翻转结构设备的重量固定,包括固定工装,通过行吊机构放置配重后,通过多个传感器的数值和角度数值进行计算分析。
3.3 重心位置计算
设计开发本设备的目的是快速侧量结构件重心的具体位置,通过四个压力传感器和一个角度编码器的检测数值,通过485 通讯把数值传输到计算中心的显控plc 上,通过plc 内部编辑的函数控制模块进行计算,同时这需要在数据采集后用一些误差补偿方法,通过一些数据处理函数的修正,可以通过编程技术,实现参数输入[1]。
3.4 数据图形显示
通过现有的显控触摸屏技术,通过图像模拟的方法把配重的检测结果显示在建立好的配重结构示意图上,能够让设备使用人员快速直观的观察配重重心的所在位置。如图7 所示。
3.5 打印输出
为了便捷可视化的显示检测结果,通过plc 和打印机的通讯,把检测的重心位置结果打印成位置标签,把位置标签贴在配重的特定位置上,便于下个工艺人员监测配重的重心属性,成为挖掘机配重加工工艺上的重要一环[5],方便检测人员检查评估。见图8 所示。
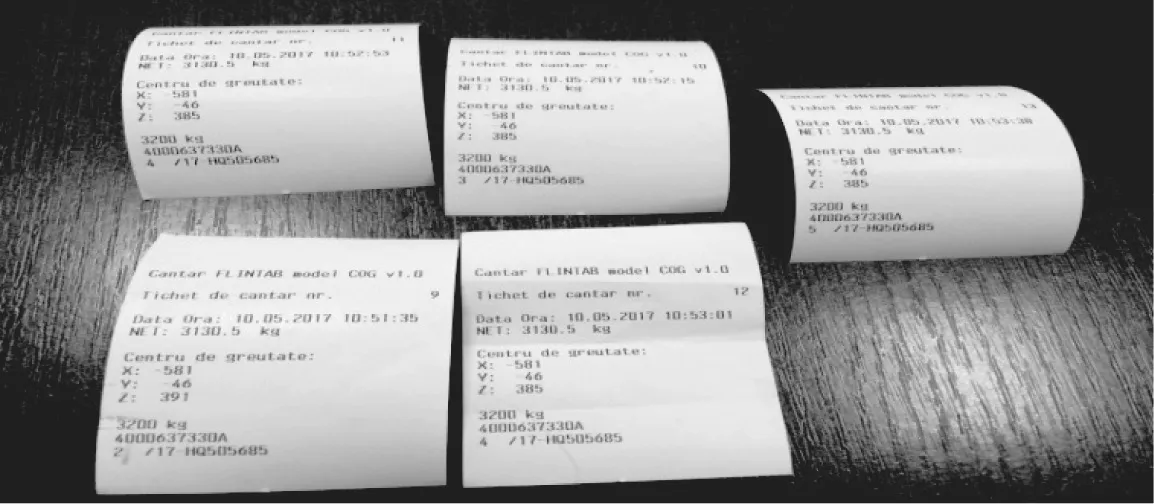
图8 重心位置结果数据输出
4 结论
结合实际使用要求确定plc 控制程序的设计,最终完成对于挖掘机配重重心高度的快速测量。节省工厂中对重心检测所耗费的时间。此外,在结构设计和分析中找出影响重心高度的关键因素,进而进行误差分析和补偿[4],对所有大型结构件的设计过程中需要考虑重心位置时,本研究有重要参考意义。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
一重技术(2021年5期)2022-01-18
装备制造技术(2020年4期)2020-12-25
中学生数理化·八年级物理人教版(2019年4期)2019-05-20
装备制造技术(2018年10期)2018-12-24
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
有色金属设计(2015年2期)2015-02-28
筑路机械与施工机械化(2014年10期)2014-03-01
