基于BP和PGA算法的斜视SAR成像方法
2021-10-27 05:57闫梦圆高安琪薛晨孙兵李景文
中国传媒大学学报(自然科学版) 2021年3期
闫梦圆,高安琪,薛晨,孙兵,李景文
(北京航空航天大学电子信息工程学院北京 100083)
1 引言
在合成孔径雷达(Synthetic Aperture Radar,SAR)成像中,BP 成像算法作为一种时域算法,不需要频域的近似,能够精确成像,并且能够适用于雷达的各种运动轨迹,普适性强。在大斜视情况下,SAR 的距离方位耦合较为严重,目标回波信号频谱的数学表达复杂,其他频域成像算法如距离多普勒(Range-Doppler,RD)算法[1]等,其成像结果的精确程度与回波信号的二维频谱的精确程度密切相关,在斜视情况下成像效果欠佳。而BP 算法作为时域成像算法,根据雷达到像素点之间的距离计算时延,将回波数据反向映射到成像区域的每个像素,并把所有像素点的回波进行相干叠加来成像。避免了距离方位耦合的问题[2]。因此对于斜视SAR 成像情况,本文使用BP 算法进行处理。
但是由于目标的运动和平台运动误差,会产生回波多普勒信号相位误差,导致BP 成像聚焦困难,需要进行相位补偿。随着SAR成像分辨率的提高,合成孔径长度增加,对回波相位误差的补偿提出了更高的要求[3]。虽然依靠惯性导航运动补偿系统直接测量雷达平台加速度,获得载机平台的位置,能够补偿一定的相位误差,但是这种方式会产生积累相位误差,不能够完全补偿相位误差[4]。能够精确估计出SAR 天线相位中心的运动误差,在成像过程中进行运动补偿,是实现高分辨率SAR成像的难点[5]。
成像的散焦大部分来自于回波信号中的二次相位误差,能够估计并补偿二次相位误差能够有效的解决方位向散焦问题,自聚焦处理是常用的方式。传统的自聚焦方法如子孔径相关法(Map Drift,MD)[6],相位差算法(Phase Difference,PD)[7]、反射率偏移法(Reflectivity Displacement Method,RDM)[8]等,都只能估计低阶相位误差,而相位梯度自聚焦算法(Phase Gradient Autofocus,PGA)作为非参数模型算法,不需要确定相位误差的阶数,因此能够同时补偿低阶、高阶以及随机误差[9],并能够较好的用于有强散射点雷达回波的运动误差估计[10]。
在已有的PGA算法中,相位梯度估计都需要沿二维数据域的某一维度进行估计[11],但是在斜视情况下的BP 算法成像中,目标的扩展函数方向与斜视角在地面的投影角度有关,方位向不再是严格的正交方向。因此斜视情况下SAR 系统目标自聚焦后成像质量得不到明显的提升。为了解决这一问题,本文提出了一种基于BP 算法点目标扩展函数二维不正交情况下的自聚焦方法。使斜视情况下机载SAR 的成像质量得到显著提升。
2 BP成像算法原理



BP 算法实际上是先确定图像的网格大小和区域,然后按照时延找到它在原始回波数据中的对应位置,并采用插值的方法来获取回波值,最后实现针对所有像素点的叠加从而得到所需要的SAR 图像。
具体来说,首先根据目标成像区域场景大小建立地面成像网格。根据雷达轨迹,在地面沿方向建立成像网格,网格像素间隔根据实际分辨率指标设定。
3 改进的PGA自聚焦方法
实际情况中,由于目标的运动,会导致回波多普勒信号存在相位误差,造成图像的散焦,因此在BP 成像后进行PGA处理以补偿相位误差。
但是在大斜视SAR成像情况下,最终目标的扩展函数方向受到斜视角的影响,传统的PGA算法难以得到效果良好的自聚焦结果。究其原因,主要是因为成像网格的方向沿东-北方向划分,在斜视情况下,会造成点目标扩展函数二维不正交,而传统PGA沿着二维数据域中的某一维度进行估计,方位向水平或是垂直时,才能得到较为准确的估计结果。因此无法准确估计相位误差,导致自聚焦失效。
本文提出的自聚焦方法过程流程图如图2所示。
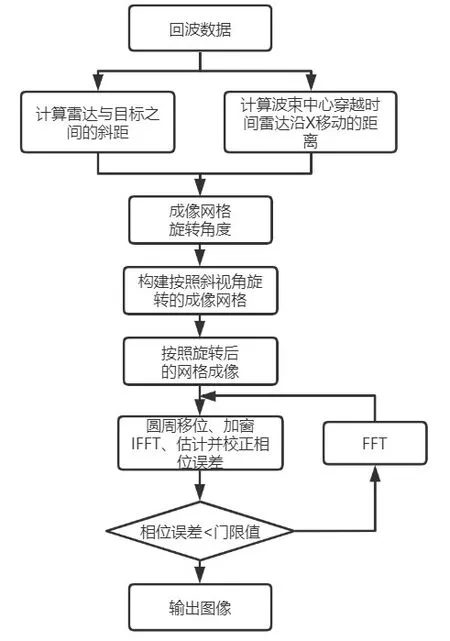
图2 改进的自聚焦算法流程
本方法针对斜视情况下相位梯度自聚焦失效的问题,提出了一种新的确定成像网格方向以及划分的方法,解决斜视情况下相位梯度自聚焦失效的问题。
首先根据大斜视机载SAR成像几何模型,绘制出斜视情况下,合成孔径中心时刻SAR观测目标的地面投影图,如图3所示。
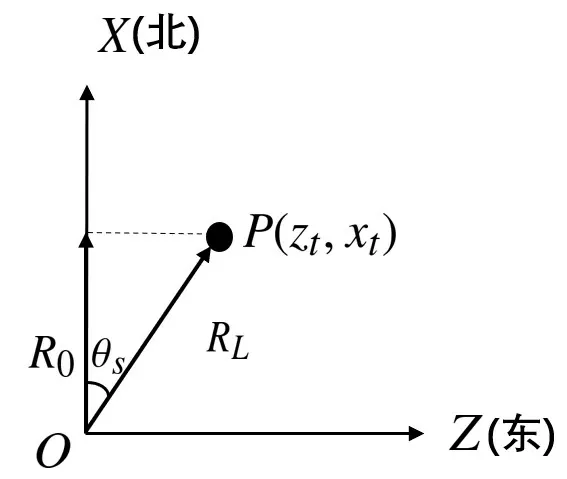
图3 地面投影图

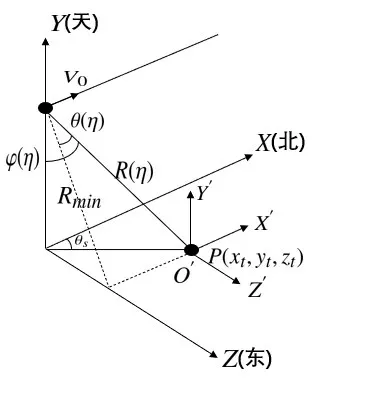
图1 大斜视机载SAR成像几何模型


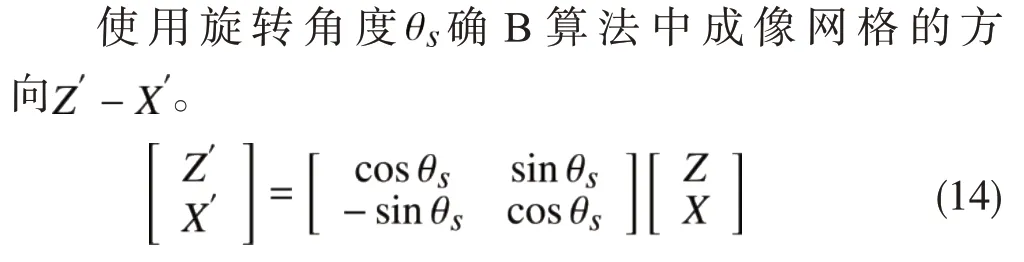

图4 网格方向选取对比
按照改进方向划分网格进行成像,能够将大斜视情况下BP 成像中方位向的倾斜校正为严格正交方向,再进行相位梯度自聚焦处理。
对成像结果逐距离门找到强散射点,沿方位向进行圆周移动操作,将各距离门内的强点目标移动到各自方位向场景中心,可以将目标位置引起的多普勒频率偏移去除。
对圆周移动后的数据加窗,保留用于估计相位误差的目标主要信息,滤除对相位误差没有贡献的部分,能够保证相位误差估计过程中输入数据具有较高的信噪比。
记图像的方位向点为,距离向点为。把中心移位和加窗后的图像数据经逆傅里叶变换回到距离压缩相位历程,进行相位误差的估计。在距离压缩相位历程,数据表示为:


在实际的操作中,利用下式进行相位差的估计:

根据式(18)得到所有相邻方位向上的相位误差,通过积分计算出整个孔径上的相位误差。

随后,补偿相位误差,并进行迭代,以逐渐提高图像质量,当相位误差小于可以认为相位误差基本被消除,得到聚焦后的SAR图像。
4 仿真验证
下面对本文提出的机载SAR 点目标扩展函数二维不正交的自聚焦方法进行仿真验证。
建立舰船目标模型如图5 所示。舰船模型长60m,宽30m,高20m,散射点抽样间隔为5m,共37个散射点组成,舰船目标的转动运动为分别绕三个轴转动的俯仰、偏航、滚动。仿真中不考虑船的直线运动,主要利用船自身的旋转运动形成的转角成像。本次仿真中仅考虑舰船的晃动对成像的影响。

图5 仿真舰船模型
首先对舰船目标中的单点目标进行仿真和评估,在机载大斜视情况下,设置雷达平台斜视角为35°,主要仿真参数如表1所示。
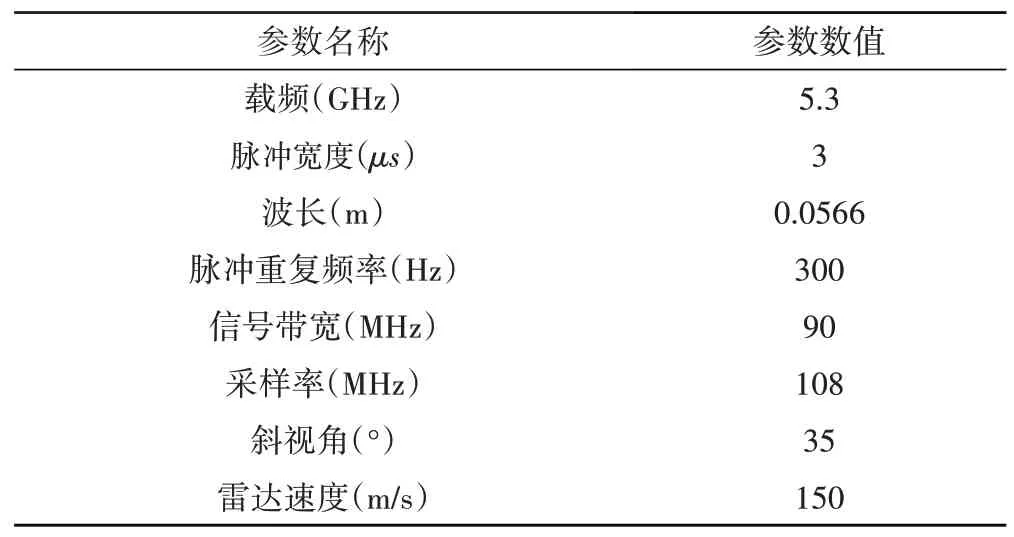
表1 主要仿真参数
分别采用两种方法进行仿真。
方法一:回波数据在经过BP 处理后,使用传统PGA进行运动补偿,不进行坐标转换。
方法二:使用本文提出的算法,根据斜视角确定成像网格方向,使点目标方位旁瓣与成像网格中的横向方向正交,再逐距离门估计二次误差相位进行误差补偿。两种方法的仿真结果如图6、图7、图8 和图9所示。
方法一仿真结果可以看出,BP 成像后,如图6 所示,目标的方位旁瓣严重倾斜,方位向存在严重散焦,经过PGA 处理后,如图7 所示,可以看出成像结果没有得到明显改善。

图6 方法一BP成像结果

图7 方法一PGA结果
方法二处理结果可以看出,在BP 成像后,经过坐标转换,成像结果如图8所示,目标的方位旁瓣与图像的纵向维度平行,存在严重散焦;经过PGA处理后,成像结果如图9所示,方位向散焦得到明显改善,得到聚焦良好的点目标图像。
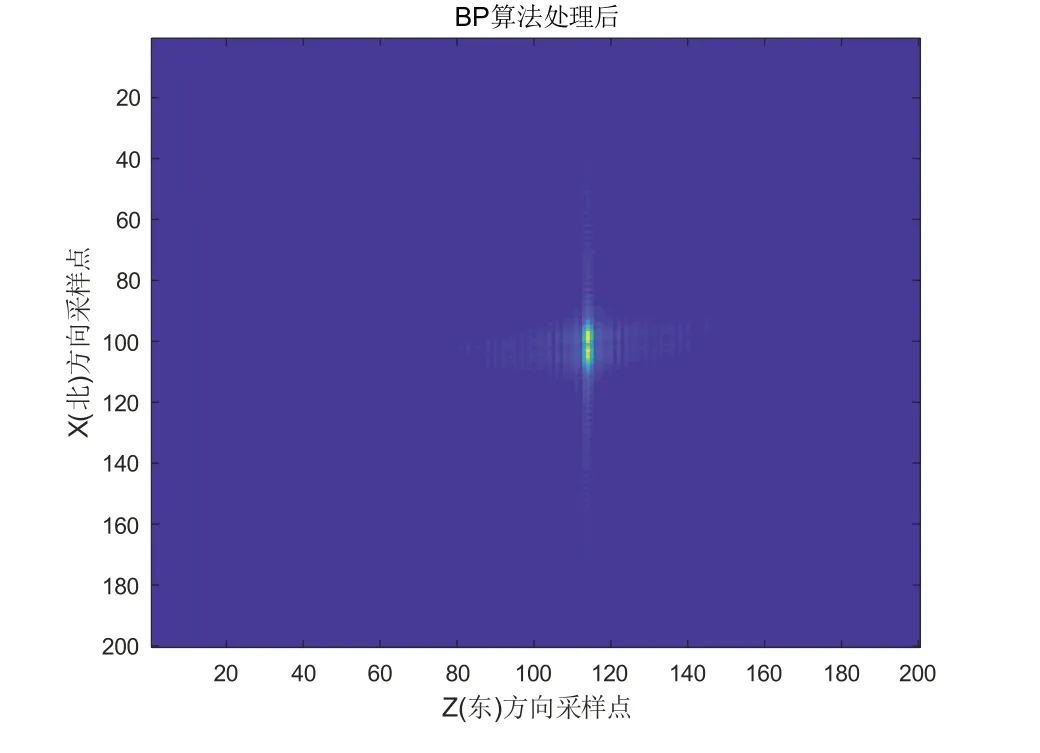
图8 方法二BP结果
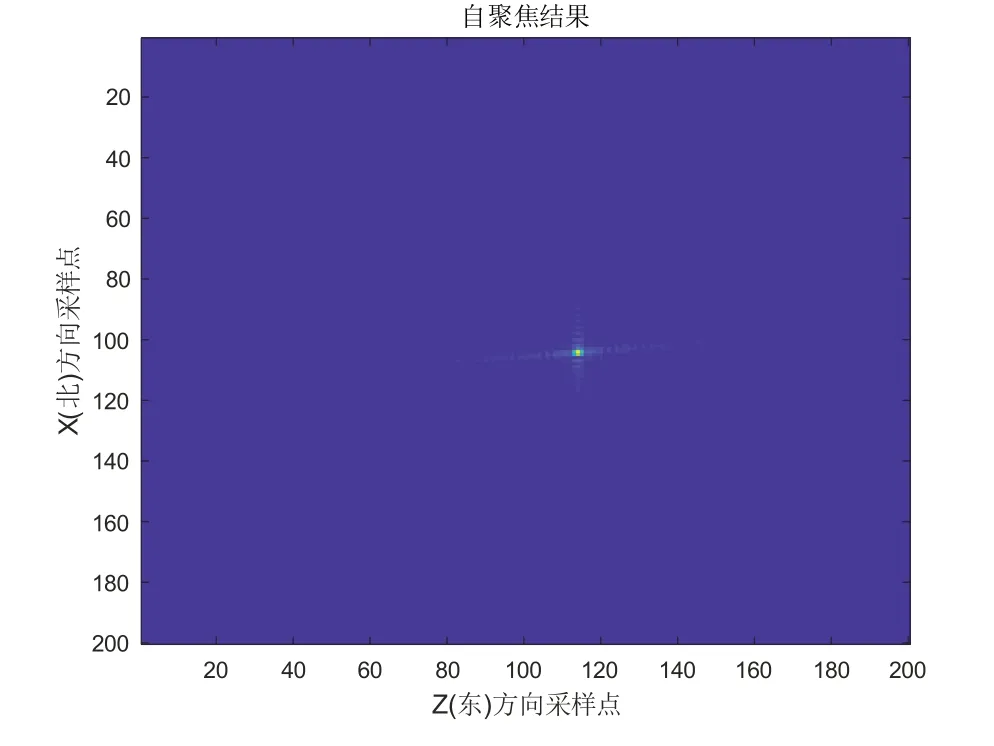
图9 方法二PGA结果
对两种方法得到的点目标图像进行评估,对比单点目标在两种方法处理后的变化,分析点目标的性能参数,得到评估结果,方法一得到的点目标评估剖面图如图10.a 所示,点目标评估结果如图11 所示;方法二处理得到的点目标评估剖面图如图10.b所示,方法二得到的点目标评估结果如图12所示;二者的点目标评价指标如表2所示。
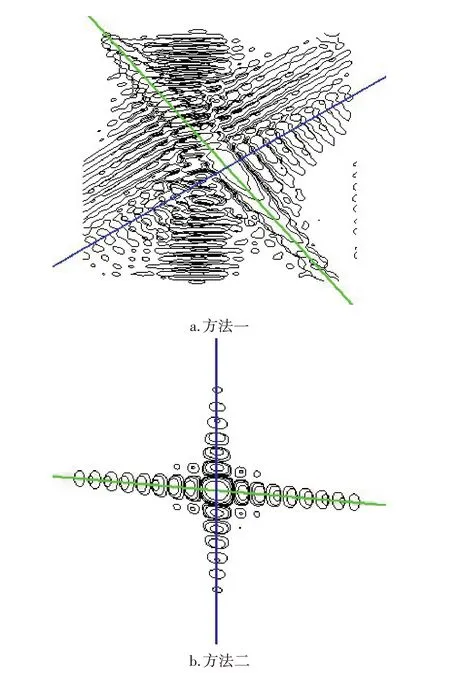
图10 两种方法点目标评估剖面图
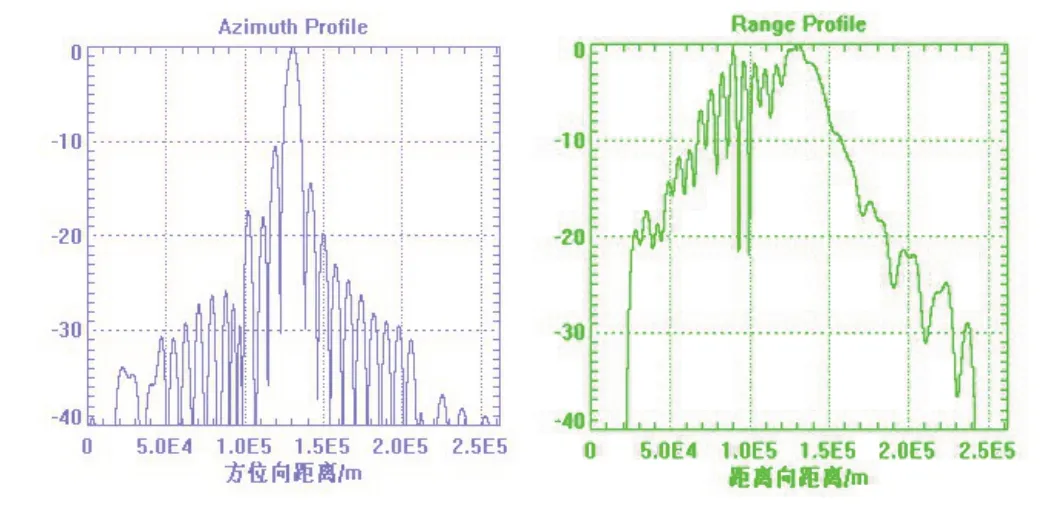
图11 方法一PGA后点目标评估结果
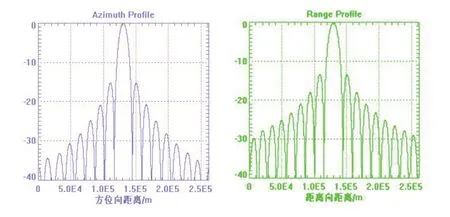
图12 方法二PGA后点目标评估结果

表2 点目标评价指标
由两种方法的点目标评估剖面图可以看出,方法一最终的点目标成像中,方位向仍然存在明显的倾斜,方法二的点目标成像中,方位旁瓣与图像的纵向维度平行。
由两种方法得到的点目标的峰值旁瓣比(Peak Side Lobe Ratio,PSLR)和积分旁瓣比(Integral Side Lobe Ratio,ISLR)可知,方法一得到的方位向和距离向的峰值旁瓣比和积分旁瓣比的幅值都远远小于方法二,说明经过方法一的自聚焦之后,旁瓣能量仍然较大,没有达到聚焦效果,而经过方法二本文提出的自聚焦方法处理后,峰值旁瓣比和积分旁瓣比维持在较低水平,说明聚焦效果良好。
对整个舰船目标进行仿真,使用本文提出的改进后的PGA算法进行自聚焦。在舰船模型中,取三个点设为强点,便于观察。BP 成像后得到结果如图13 所示,经过自聚焦后得到的成像结果如图14所示。
从图13 和图14 可以看出,经过改进的PGA 处理之后,舰船模型中三个强点目标的方位向散焦得以改善,聚焦效果良好。

图13 舰船BP成像结果

图14 舰船PGA后结果
5 结论
本文介绍了一种适用于斜视情况下由于BP 算法成像导致点目标扩展函数二维不正交时PGA 算法失效时的成像方法。通过斜视角确定成像网格方向,使点目标方位向旁瓣与成像网格中的一维正交,进行BP 成像。再逐距离门估计二次误差相位进行误差补偿,从而实现方位向聚焦,解决了斜视情况下BP 成像后,相位梯度自聚焦由于点目标扩展函数二维不正交导致的失效问题,是一种有效的斜视SAR成像方法。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
幼儿园(2021年12期)2021-11-06
康颐(2020年14期)2020-11-10
海军航空大学学报(2020年2期)2020-07-27
无线电工程(2020年8期)2020-07-25
电子技术与软件工程(2017年12期)2017-07-05
中老年健康(2016年1期)2016-03-07
小学生时代·大嘴英语(2015年7期)2015-11-23
为了孩子(孕0~3岁)(2009年6期)2009-07-15
祝您健康(1987年4期)1987-12-29