
船体小组立自适应路径规划系统
2021-10-27 01:37郭海平周荣富谢静远焉诗萌
机电设备 2021年5期
郭海平,周荣富,张 然,谢静远,焉诗萌
(上海船舶工艺研究所,上海 200032)
0 引言
随着制造业数字化和智能化的快速发展,工业机器人在先进制造业包括船舶制造业、汽车制造业、飞机制造业等重型制造业内发挥着重要的作用,它的发展也一定程度上代表着一个国家的先进制造业的发展水平。近年来我国船舶工业产业规模迅速扩大,但总体还是处于粗放型的发展阶段,与先进造船强国相比差距明显。在日韩先进造船厂家自动化率可达68%,但是国内骨干造船企业的焊接自动化率最高仅为20%,质量和效率都很难得到保证。船舶小组立在船舶制造中具有一定代表性,对小组立的智能化和数字化升级具有重要意义。因此本文重点对下列问题进行了研究[1]:
1 船体小组立装焊生产线现状


2 机器人自适应控制关键技术
2.1 机器人自适应控制编程方法


2.2 船体小组立结构件特征采集技术




2.3 船体小组立焊接路径规划
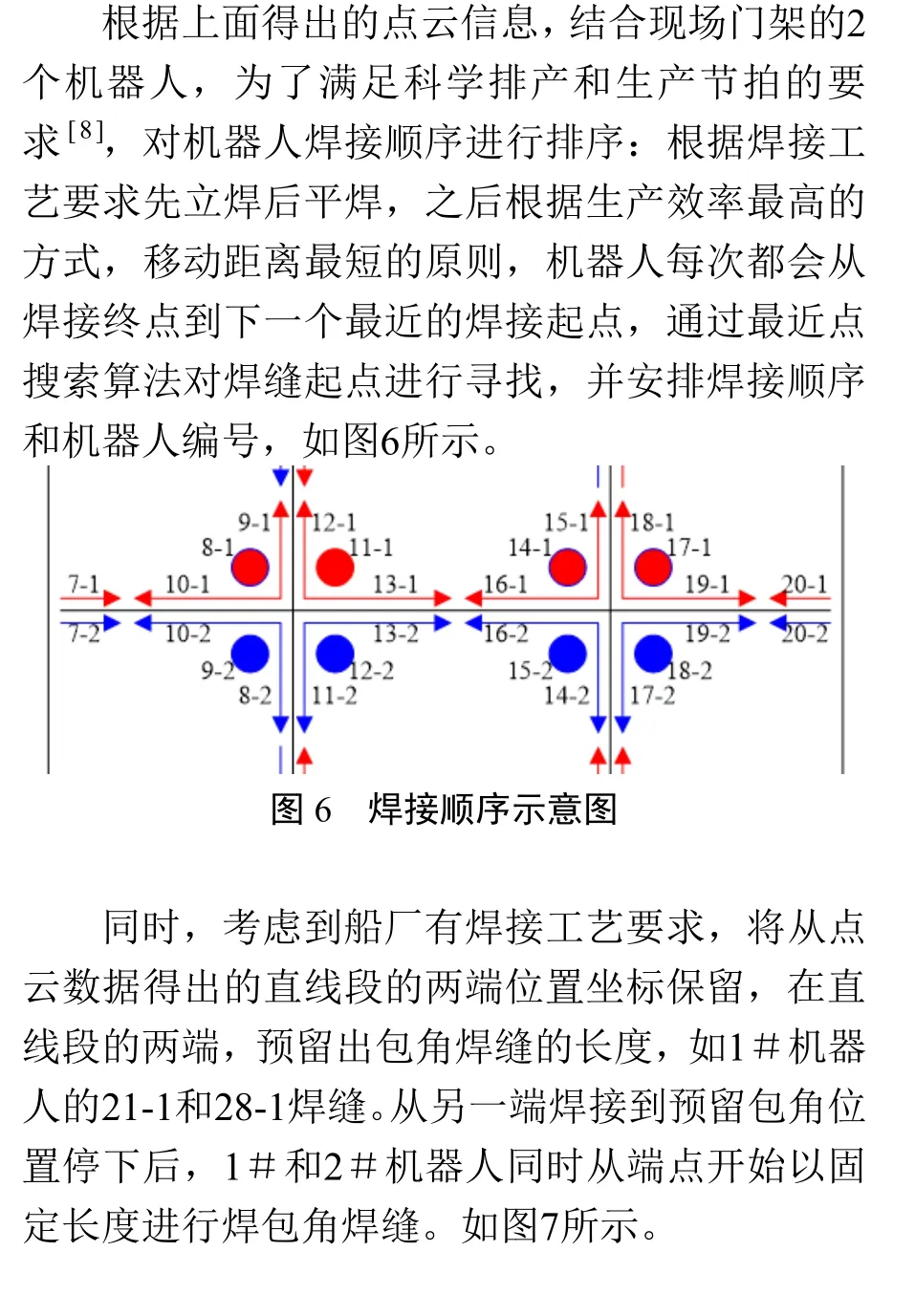

图7 包角焊接示意图
因为线激光传感器有一定的误差,且受到现场外部环境和装配误差等影响,对焊接起点的误差能达到40 mm左右,为了对焊缝起点进行精定位,选用点激光传感器识别起点;并且,在小组立工件的焊缝类型中有多种焊接工艺和焊缝类型,由于没有通过离线编程模型输入得到坡口、过焊孔等信息,需要在线自适应获取焊缝类型,目前通过点激光传感器并不能得到完整焊接工艺参数信息,故现阶段从上位机界面输入该点需要的焊缝类型信息,发送给机器人执行焊接位姿程序。
3 结论
针对船舶小组立结构件焊接生产线,提出利用线激光和点激光传感器进行2次定位,确定了视觉识别系统的模块功能和焊缝规划的规则算法,并通过C++语言和PCL库等实现功能。同时搭建小组立产线实验平台,对比传统人工示教焊缝定位和焊接顺序规划,其在保证了焊接质量的同时提升了定位精度,全程无需人工干预,也不再依赖现场条件要求,提高了船体小组立装焊产线的效率,为小组立智能生产线提供了可以借鉴的范例,保证了船体小组立装焊生产线向高质量高效率发展。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
今日农业(2021年13期)2021-11-26
锻压装备与制造技术(2021年2期)2021-07-19
建材发展导向(2021年6期)2021-06-09
金属加工(热加工)(2020年12期)2020-02-06
制造技术与机床(2018年12期)2018-12-23
制造业自动化(2017年2期)2017-03-20
现代企业文化(2016年1期)2016-12-23
焊接(2015年9期)2015-07-18
有色金属设计(2015年2期)2015-02-28
