开架式水下机器人水动力系数计算与动力学建模
2021-11-01 09:08闫银坡于福杰陈原
兵工学报 2021年9期
闫银坡, 于福杰, 陈原
(山东大学(威海) 机电与信息工程学院, 山东 威海 264209)
0 引言
近年来,随着海洋勘探和开发的进展加快,水下机器人在极端作业环境下得到了广泛应用[1]。为了实现对水下机器人运动的精确控制,水下机器人动力学模型中的水动力系数必须具有相当的准确性[2]。目前,求解水动力系数的方法主要有经验公式估计法、船模试验法和计算流体力学(CFD)数值模拟法[3]。其中,采用CFD技术模拟船模试验的方法具有不受试验设备精度影响和成本低的优点,并可提供不受外界环境干扰的理想仿真环境,因此广泛应用于水下航行器水动力系数的计算[4-6]。
现有CFD数值模拟法多采用基于雷诺平均Navier-Stokes方程(RANS)方法的CFD软件(Fluent,Star CCM+和CFX等商用软件,以及基于开源平台OpenFOAM的自主开发软件)模拟船模试验的方式进行。船模试验模拟可分为稳态船模试验模拟和非稳态船模试验模拟。稳态船模试验时航行器固定不动,通过系列地改变来流速度和航行器相对来流偏角(即漂角)实现对稳态纵荡和斜航运动模拟,进而拟合求解相应的线性黏性水动力系数和耦合黏性水动力系数,相关研究见文献[7-9]。此外,通过将求解域设置成弧形流域模拟旋转臂试验,可求得与摇艏角速度相关的耦合水阻尼系数[10]。但稳态运动模拟仅可用来求黏性水动力和耦合水动力系数,无法求惯性水动力系数,且需要进行多组模拟,十分耗时。通过CFD技术模拟非稳态平面运动机构(PMM)试验,可以计算各种惯性水动力系数和黏性水动力系数,与稳态船模试验模拟相比,非稳态PMM模拟试验大幅度缩减了计算量。现有基于传统CFD技术的非稳态模拟研究,多采用动网格技术、滑移网格技术和重叠网格技术等处理求解域网格的变形和重构问题[11-14],相对于稳态运动模拟,需要更加细致的网格划分、更长的计算时间和更高性能的计算平台。
此外,基于RANS方法的传统CFD技术对于具有复杂外形的水下机器人会面临网格划分繁琐和计算收敛性的限制,因此研究对象多为外形简单的水下机器人和具有完备数据参考的Suboff潜艇。另外,由于收敛性的限制,基于RANS方法和动网格技术模拟无法对大振幅PMM(LAPMM)试验进行模拟[15]。通过模拟小振幅PMM试验虽然可以求得惯性水动力系数和线性黏性水动力系数,但是非线性黏性水动力系数的计算需要额外的稳态运动模拟。水下机器人在进行大机动操作时,若仅考虑线性水动力系数而忽略非线性水动力系数,水下机器人所受水动力的计算值与实际值相比不仅数量上存在较大差异,且性质不同,从而导致无法实现对水下机器人的精确控制[16]。
为了建立更加符合水下机器人结构性特点的动力学模型,本文提出基于格子玻尔兹曼方法(LBM)数值模拟LAPMM试验的水动力系数计算方法,以快速计算出这类大振幅机动操作且外形复杂的水下机器人惯性水动力系数和包含非线性项的黏性水动力系数。不同于传统CFD数值模拟方法,基于LBM的数值模拟不再以Navier-Stokes方程为控制方程,不再基于连续介质假设,而是通过对离散流体微观粒子的大量统计来获得宏观流体的运动规律[17]。LBM方法无需进行繁琐的网格划分,对于复杂结构的表面只需要加密网格即可;在进行大振幅非稳态运动模拟时避免了现有研究中动网格难以更新的问题,克服了对水下机器人复杂程度和非稳态运动振幅大小的限制,对水下机器人水动力系数的数值计算和动力学建模具有普适的应用意义。
1 水下机器人动力学建模
1.1 水下机器人描述与坐标系构建
本文研究对象为一款具有薄片、弯管等特殊部件的开架式遥操作水下清理机器人(ROV),样机及三维模型如图1所示,其主体尺寸为长L=1.23 m,宽W=1.31 m,高H=0.60 m,质量为56.914 kg,排水量为0.067 4 m3,浮力略大于重力。ROV载体共配置6个推进器,单个推进器功率为850 W,可提供正向推力约150 N、反向推力约60 N.

图1 ROV样机与三维模型Fig.1 ROV prototype and 3D model
为了描述水下机器人的空间三维运动,建立运动坐标系Oxyz和惯性坐标系Eξηζ,如图2所示。图2坐标系中各符号和水下机器人运动参数的含义如表1所示。
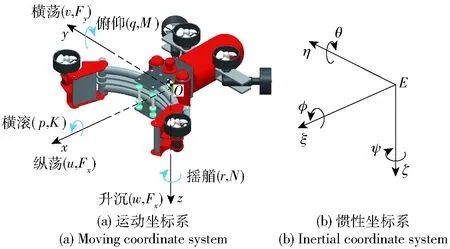
图2 ROV坐标系的定义Fig.2 Definition of ROV coordinate system
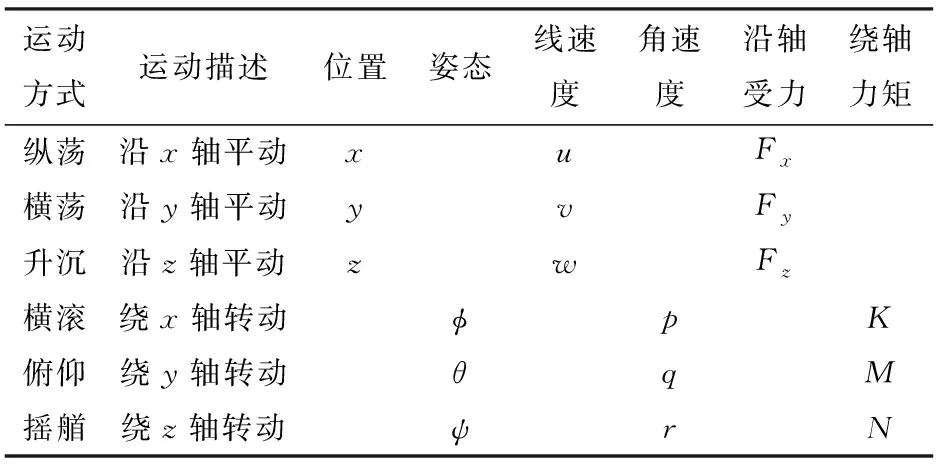
表1 ROV运动参数定义
1.2 水下机器人的动力学建模
基于1.1节的坐标系系统,定义ROV在惯性坐标系下的位姿向量η=[η1η2]T,其中η1=[xyz]T,η2=[φθψ]T;定义ROV在运动坐标系下的速度向量v=[v1v2]T,其中v1=[uvw]T,v2=[pqr]T,则ROV的运动学方程可以表示如下:
(1)
式中:
(2)
(3)
该水下机器人在y轴上具有较高的俯仰稳定性和较大的转动惯量,因此假设俯仰角θ在[-π/2 rad -π/2 rad]内,即转换矩阵J2不会出现奇异性问题。
ROV是一种具有强非线性耦合、强参数不确定性和未知外干扰的复杂系统,完整的ROV动力学模型[18-19]为

(4)
式中:MRB为ROV的刚体惯性矩阵;Ma为表示惯性水动力的附加质量矩阵;CRB为MRB产生的哥氏力矩阵;Ca为Ma产生的哥氏力矩阵;Dl和Dn分别为黏性水动力的线性和2阶非线性水阻尼矩阵;g为恢复力向量;f为环境干扰力及模型参数的不确定量;τ为推进器驱动力向量,τ=[FxFyFzKMN]T。MRB、CRB、Ma、Ca、Dl、Dn和g的完整形式见参考文献[20-21],不再详述。
通过计算机辅助设计软件Solidworks可计算ROV的质量属性,其中:质量m=56.914 kg;转动惯量Ixx=4.849 kg·m2,Iyy=7.373 kg·m2,Izz=11.369 kg·m2,Ixy=Iyx≈0 kg·m2,Ixz=Izx=-0.121 kg·m2,Iyz=Izy=0 kg·m2;重心位置为rg=[xgygzg]T=[0.003 0 -0.014]T,取重心位置为[0 0 0]T。浮心位置rb可通过配置浮力材料进行调节,取rb=[0 0 0.05]T.由ROV的质量属性,可根据刚体动力学计算得到刚体质量惯性矩阵MRB和刚体科氏力及向心力矩阵CRB,具体表达式见文献[22]。
2 格子波尔兹曼方法
可通过连续介质描述法和运动论描述法对流体建立数学模型[23]。连续介质描述法假设流体由连续分布的流体微团组成,其内部包含足够多的流体分子,根据质量守恒定律、动量守恒定律和能量守恒定律推导得出流体运动控制方程,即Navier-Stokes方程。运动论描述法采用统计方法研究大量粒子运动的规律,从微观角度讨论系统的宏观运动特征。运动论描述法用分布函数f(r,ξ,t)描述流体系统中粒子的密度分布,并将宏观物理量表示为分布函数的矩。玻尔兹曼方程是运动论描述法的基本输运方程,其描述了分布函数f(r,ξ,t)的演化规律。LBM可以看作是对连续玻尔兹曼输运方程的离散求解,其离散输运方程[24]定义如下:
(5)

LBM的关键在于构造粒子间的碰撞模型。典型的碰撞模型为多松弛时间模型,定义如下:
(6)
(7)

(8)
ωi为保持各向同性而建立的权系数,ρ为宏观密度,cs为声速,u为宏观速度,δ为克罗内克符号,下标α和γ表示方程中向量的不同空间分量。
与标准的多松弛时间模型不同,本文中碰撞模型的散射算子作用在中心矩空间,并通过转换离散粒子速度和局部宏观速度,将松弛过程在运动参考系下进行,改善了给定速度集的伽利略不变性和数值稳定性。LBM按照空间维度d和分布函数的数量b进行分类,记为DdQb.本文用于三维仿真的晶格结构为D3Q27(见图3)。此外,本文采用的湍流模型为大涡模拟,通过直接求解滤波Navier-Stokes方程来计算比网格尺度大的涡,并通过引入亚格子应力模型来考虑小涡对大涡的影响[25]。引入的亚格子应力模型为壁面自适应局部涡流黏性模型,可以提供一致的局部涡流黏度和近壁面行为,更适合对本文复杂水下机器人形成的复杂湍流进行模拟[26]。
图3 D3Q27速度离散化的晶格模型Fig.3 D3Q27 lattice model of velocity discretization
3 纵荡和斜航稳态运动模拟
现有研究已经充分证明RANS方法模拟水下机器人运动的精确性,因此可通过对比稳态纵荡和斜航运动在基于RANS方程的Fluent软件和基于LBM的Xflow软件中的模拟结果,验证LBM模拟水下机器人运动的可行性。由于基于RANS方程的传统CFD技术难以实现复杂外形水下机器人的大振幅非稳态运动模拟,故仅对比了稳态运动的模拟结果,这也是本文探究LBM方法模拟水下机器人运动以求水动力系数的原因。
3.1 稳态运动描述和求解器配置
在稳态纵荡运动模拟中,设置求解域入口流速为U,以相对运动代替ROV的纵荡速度(见图4(a))。斜航运动模拟中,将ROV模型固定在长方体求解域中,设置求解域入口流速,并系列地改变漂角β(见图4(b))。ROV的纵荡速度u、横荡速度v、漂角β和入口流速U的关系可以写作(9)式:
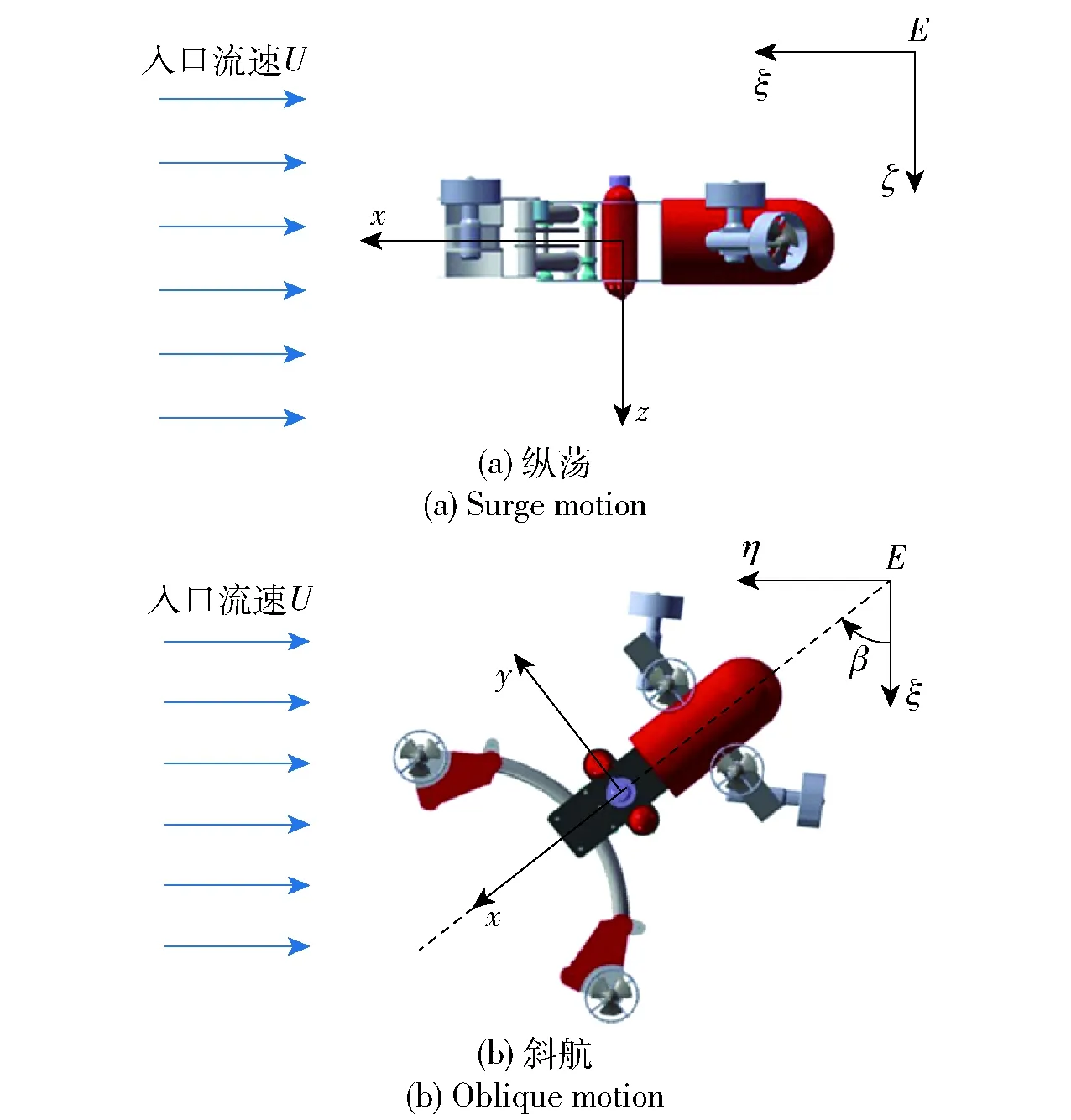
图4 纵荡和斜航稳态运动模拟示意图Fig.4 Schematic diagram of steady-state motion simulation
(9)
模拟水池尺寸为长L=10 m,宽W=8 m,高H=6 m,满足ROV首部迎流大于1.5倍ROV体长、尾部大于3倍ROV体长的要求。稳态纵荡运动模拟时,求解域入口流速U为0~1 m/s,间隔0.1 m/s;斜航运动模拟时,求解域入口流速为0.8 m/s,漂角β设置为-10°~10°,间隔2°.
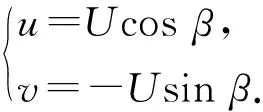
Fluent软件仿真中求解域内划分尺寸为3 m×2 m×1 m的子流域,以便对近壁面网格进行细化。对求解域进行网格划分时选择非结构网格,最终整个流域的网格数量约为240 W,网格结构如图5所示;湍流模型选择SSTk-ω模型,壁面函数为对y+不敏感的增强壁面函数,压力耦合算法选择压力隐式算子分割(PISO)算法,求解域入口为速度入口,出口为压力出口。
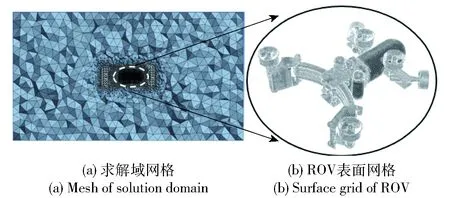
图5 Fluent软件仿真中的网格结构Fig.5 Meshing of solution domain in Fluent simulation
Xflow软件仿真时求解域内划分两级子流域,外流域求解尺度为0.1 m:子流域Ⅰ的尺寸为4 m×2 m×1 m,求解尺度为0.012 5 m;子流域Ⅱ的尺寸为6 m×3 m×2 m,求解尺度为0.025 m;ROV的目标求解尺度为0.012 5 m,尾迹求解尺度为0.025 m,并选择自动设置尾迹细化的阈值。整个求解域共划分为约670万单元,求解尺度结构如图6所示。此外,仿真时间步长为0.01 s,并选择自适应细化算法。湍流模型选择壁面自适应局部涡流黏性模型,求解域入口为速度入口,出口为压力出口,求解域四周壁面设置为自由滑移面,ROV的壁面函数选择增强壁面函数。

图6 Xflow软件中求解域求解尺度结构Fig.6 Resolved scale structure of solution domain in Xflow software
3.2 稳态运动模拟结果与对比
图7所示为稳态纵荡模拟中ROV在不同迎流速度下纵向力Fx和斜航运动模拟中不同漂角下横向力Fy的对比结果。从图7中可以看出:Xflow软件和Fluent软件对ROV所受水动力的预报值基本一致;当纵荡速度u=1 m/s时,纵向力Fx的相对偏差最大,约为13%;稳态斜航模拟中,当漂角β=±9°时,横向力Fy的预报值相对偏差最大,约为15%. 图8和图9所示分别为斜航运动模拟中漂角β=9°时速度流场和ROV表面压力云图的对比结果,从中可以看出形成的流场结构和ROV表面压力分布计算结果基本一致。选取ROV迎流面中的两个高压点(见图9(a)中的①和②,以及图9(b)中的③和④),Xflow和Fluent软件对该两点压力值的计算结果均约为300 Pa,误差小于10 Pa.

图7 稳态运动模拟中水动力结果对比Fig.7 Comparison of hydrodynamic results in steady-state motion simulation

图8 斜航运动速度云图(β=9°)Fig.8 Contour of velocity field in oblique towing test (β=9°)

图9 斜航运动ROV表面压力云图(β=9°)Fig.9 Contour of ROV surface pressure in oblique towing test (β=9°)
图8和图9表明,Xflow和 Fluent软件对ROV所受水动力的预报误差很小,流场结构基本一致,验证了基于LBM模拟水下机器人运动的可行性。此外,由图8可以看出,ROV所受阻尼力中明显包含较大的非线性成分,印证了水动力模型中包含非线性水动力系数的必要性。
4 非稳态运动模拟
PMM试验是约束船模试验的一种,根据振幅的大小,PMM试验可以分为LAPMM试验和小振幅PMM试验。小振幅PMM试验只能求取线性水动力系数,LAPMM试验则可以同时测量线性和非线性水动力系数。
4.1 LAPMM试验与水动力模型
现有研究中PMM试验的运动函数多采用近似处理,在运动振幅较小时可以简化水动力的表达式,降低数据处理和拟合分析的难度。但运动振幅较大时将产生较大的误差。因此,本节将建立LAPMM试验的严格运动函数,并结合ROV的结构特点推导LAPMM试验的非线性水动力模型。
4.1.1 非稳态纵荡运动
非稳态纵荡运动模拟时,求解域的入口流速设为0 m/s,ROV仅在x轴方向作正弦振荡(见图10)。
图10 非稳态纯纵荡运动示意图Fig.10 Schematic diagram of unsteady-state surge motion
非稳态纵荡运动模拟可以求得惯性水动力系数Xu(线性黏性水动力系数Xu和2阶非线性黏性水动力系数Xu|u|由稳态纵荡运动计算)。运动函数可以写作(10)式:
(10)
式中:ω为运动的角频率(rad/s);a为纵荡运动加速度(m/s2);x0为运动振幅(m)。
4.1.2 纯俯仰运动


图11 ROV纯俯仰运动示意图Fig.11 Schematic diagram of pure pitch motion
(11)
(12)

4.1.3 纯横滚运动
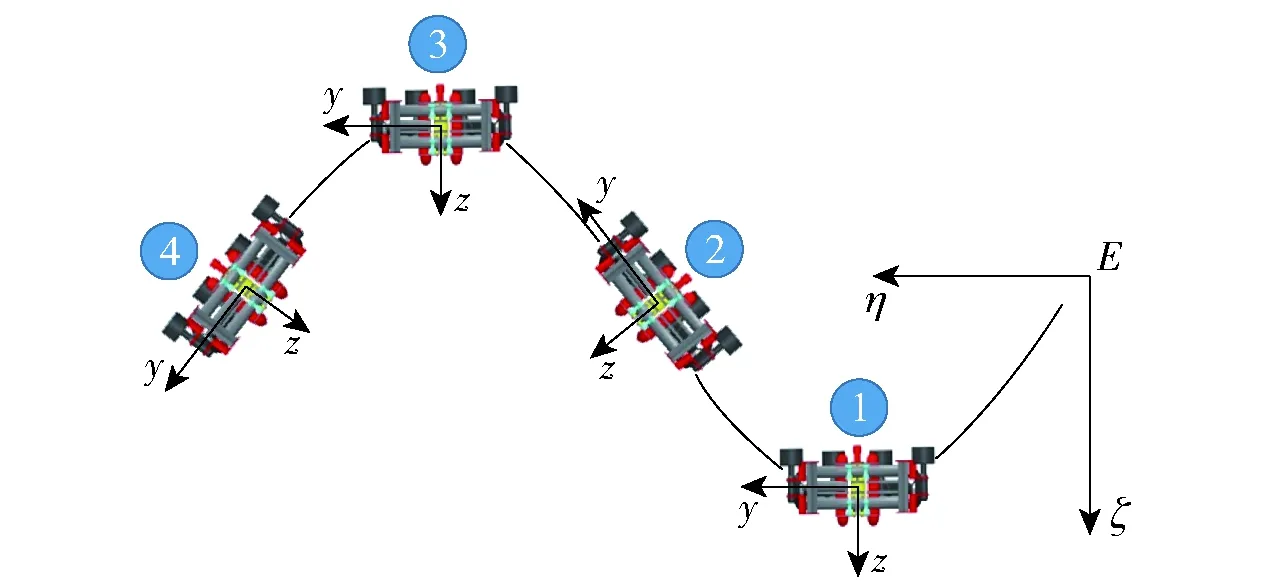
图12 ROV纯横滚运动示意图Fig.12 Schematic diagram of ROV pure roll motion
(13)

4.1.4 纯升沉运动
纯升沉运动时,ROV在垂直平面内的运动轨迹为正弦曲线,纵倾角始终为0°,如图13所示。

图13 ROV纯升沉运动示意图Fig.13 Schematic diagram of pure heaving motion
运动函数可以写作(14)式:
(14)
由于ROV结构上下不对称,Oxy面的迎流面积较大且结构复杂,当深沉速度w方向改变时所受黏性水动力的变化规律差别较大。因此,将垂向力Fzl(w)的线性水动力表达式写作(15)式:
Fzl(w)=Zww+Z|w||w|,
(15)

(16)

选无霉变的玉米芯,在阳光下曝晒2~3天后,加适当比例的水、石膏粉、石灰粉和多菌灵,拌匀,闷1小时;料的湿度为60%~65%。用稻草作原料,需晒干切成9~12厘米长,用1%石灰水浸一昼夜,捞起后用清水将石灰冲洗干净,沥干。拌料时以手握料在指缝中挤出水分不下滴为宜。拌好后将料堆放,闷堆24小时,第2天进行翻堆,并将克霉灵用喷雾器喷洒拌入料中。
(17)
ROV结构的不对称对其他水动力变化规律也会造成类似影响,但通过仿真检验可知其影响较小,因此不再对其他水动力系数进行不对称性修正。

(18)
(19)
Dn=
(20)
4.2 模拟工况与水动力系数计算结果
4.2.1 模拟工况与仿真结果
在Xflow软件中进行非稳态运动模拟时,求解器配置与求解域的划分同稳态运动模拟。在6组非稳态运动模拟试验中,运动振幅均为0.2 m;除非稳态纵荡实验在静水中模拟外(入口流速为0 m/s),其余入口流速均为0.8 m/s,LAPMM运动的频率均为0.25 Hz,仿真时间均为5个周期。图14所示为仿真时间t=16.5 s时的流场云图(为了使流场更清晰,非稳态纵荡运动采用了White-Rainbow云图,其余5组非稳态运动仿真采用Blue-Yellow云图)。由图14可以看出,LAPMM运动时ROV的复杂结构使得流场混乱复杂,受力多变,故在该ROV控制算法的研究中,应该考虑水动力模型参数的时变性,关注ROV稳定性的控制。
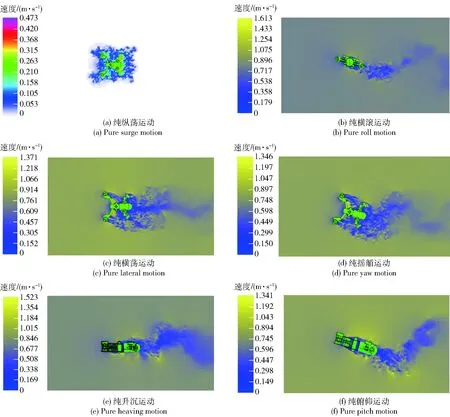
图14 LAPMM试验模拟的速度流场云图Fig.14 Contours of velocity field in LAPMM test simulation
4.2.2 仿真结果的拟合处理
通过CFD运动仿真获取的是ROV所受水动力和力矩关于时间t的离散值,通过最小二乘法将其对4.1节中所推导的水动力表达式进行拟合,便可获得相应水动力系数。
图15~图19所示为除非稳态纵荡运动外的5组LAPMM试验水动力拟合曲线。从图15~图19中可以看出,各组PMM试验水动力模型均可以较好地拟合CFD计算结果。拟合优度系数R2可以表征模型对原始数据的拟合程度,

图15 纯横荡运动CFD模拟结果与水动力 模型拟合曲线Fig.15 CFD simulated results and hydrodynamic model fitting curves of pure sway motion
(21)

图16 纯摇艏运动CFD模拟结果与水动力模型拟合曲线Fig.16 CFD simulated results and hydrodynamic model fitting curves of pure yaw motion
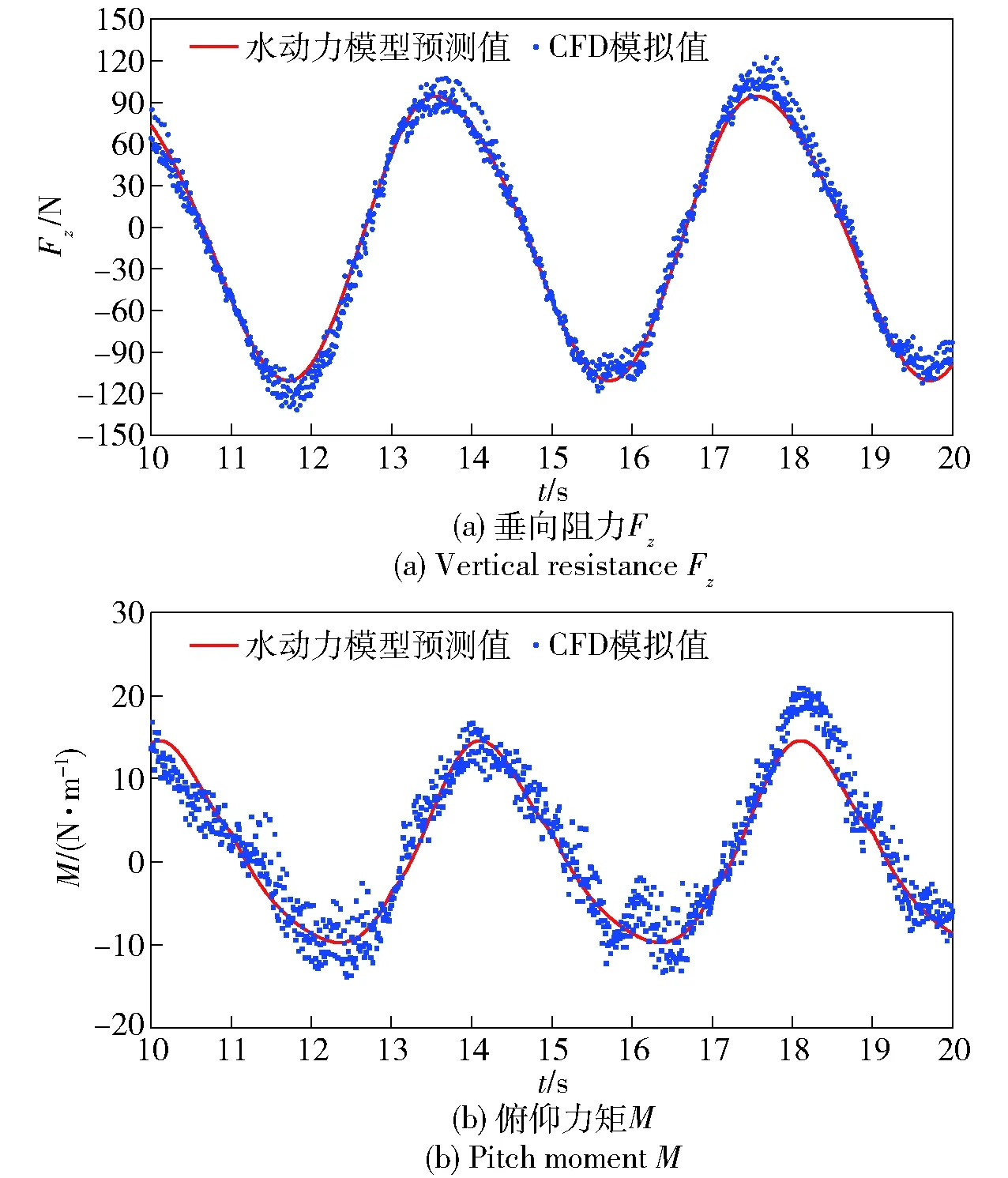
图17 纯升沉运动CFD模拟结果与水动力 模型拟合曲线Fig.17 CFD simulated results and hydrodynamic model fitting curves of pure heaving motion
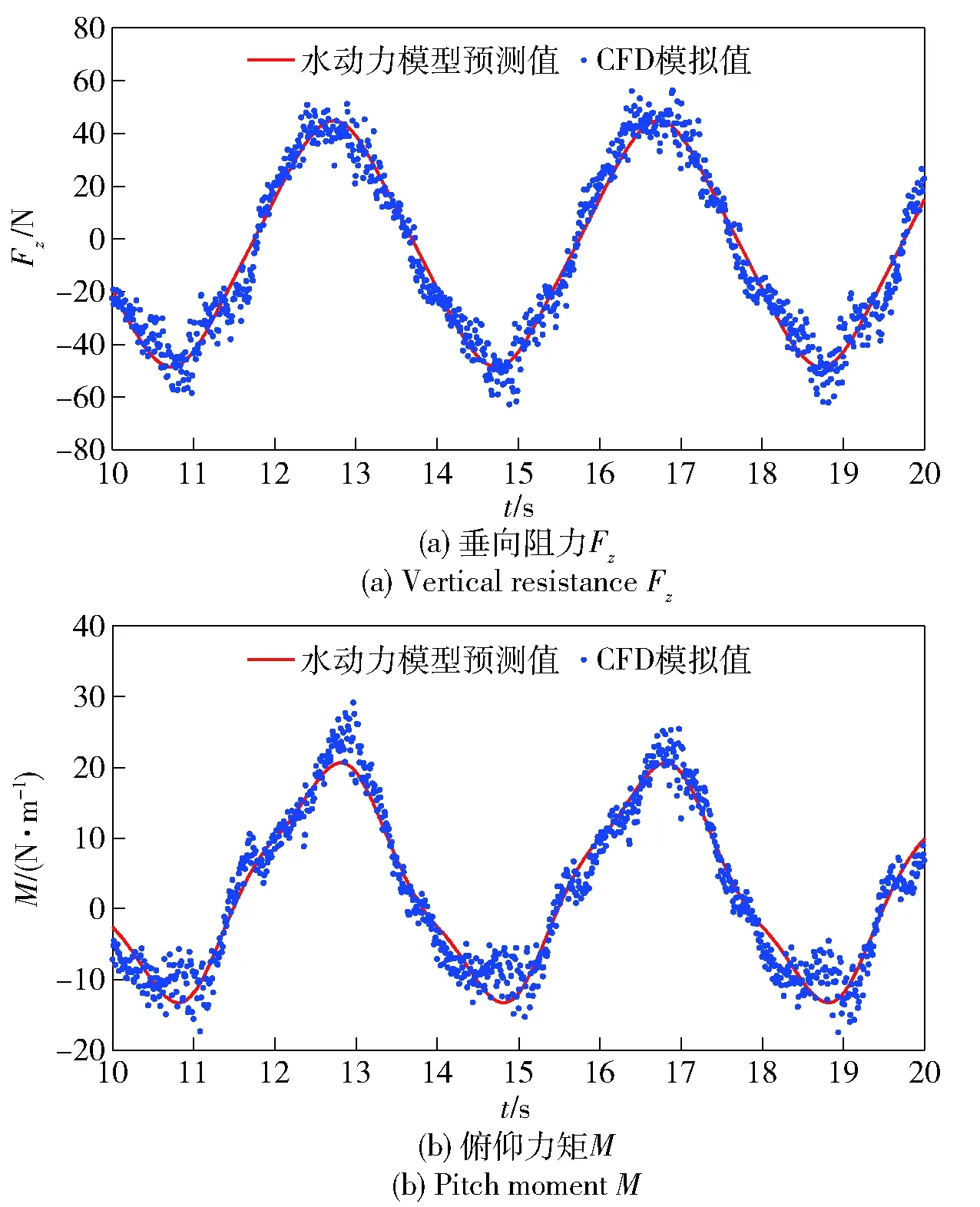
图18 纯俯仰运动CFD模拟结果与水动力模型拟合曲线Fig.18 CFD simulated results and hydrodynamic model fitting curves of pure pitch motion
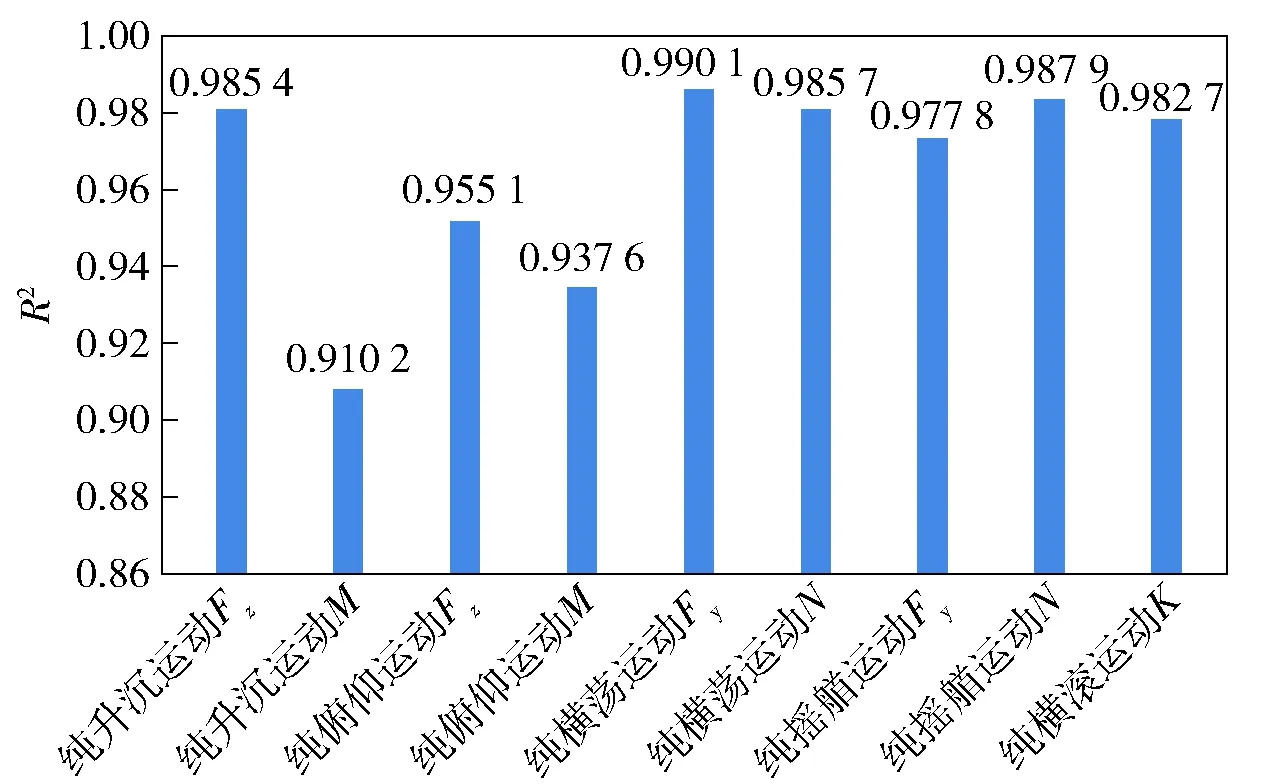
图20 水动力模型的拟合优度系数Fig.20 Goodness of fit of hydrodynamic models



图21 非稳态纵荡模拟中水动力Fx与加速度 Fig.21 Longitudinal force Fx and accelerated velocity in unsteady-state surge motion
Fx=Xu|u|u|u|+Xuu.
(22)
(22)式对不同纵荡速度下的所受黏性水动力变化曲线进行拟合,即可求解得到2阶黏性系数和线性黏性系数Xu|u|=-144.801,Xu=-12.24.至此,便求得了(18)式~(20)式中的全部水动力系数,结果如表2所示。表2中水动力系数均做了无因次化处理,各水动力系数单位及无因次化处理过程可参考文献[21]。

表2 水动力系数的计算结果
4.3 水动力模型分析


图与ROV的结构不对称性Fig.22 Relationship between with ROV structural asymmetry
附加质量矩阵与刚体惯性矩阵同样会产生科氏力和向心力作用,其与ROV速度向量v的关系用矩阵Ca表示。由已求得的惯性水动力系数可以得到Ca的具体形式如下:
(23)

此外,当垂向速度w方向改变时,与w相关的黏性水动力系数的相对变化率分别如下:
(24)
由上述可见,ROV结构的上下不完全对称除对垂向线性黏性水动力系数影响较小外,其余3项均超过了50%,表明对于具有不对称性结构的复杂外形水下机器人,黏性水动力系数的不对称性修正十分必要。
4.4 与传统方法的对比
本文的计算平台配置32核AMD 2990WX 3 GHz处理器,运行内存90 GB;基于RANS方法的仿真软件为Fluent 19.0,求解器配置16核并行运算;基于LBM的仿真软件为Xflow 2019x,仿真时16核并行运算。稳态运动模拟中,单次仿真Fluent软件用时约为6 h,Xflow软件用时约为5 h. 此外,Fluent软件仿真计算前需要对求解域进行网格划分和网格收敛性验证,尽管已简化ROV模型,但仍需要对较复杂曲面进行繁琐的局部网格优化。Xflow软件在导入模型文件后仅需要对不同求解域设置合适的求解尺度,对曲面复杂性具有更好的容忍度,在保证与Fluent软件相当精度的情况下,仿真方便快捷,易于实现。
Fluent软件仅可对小振幅非稳态运动进行模拟,现有研究通过增设稳态运动模拟求解2阶及以上非线性和耦合水动力系数的方式,计算周期长。而基于LBM的Xflow软件对运动振幅没有限制,极大地缩短了水动力系数计算周期。此外,Fluent等软件采用动网格技术时,需要编写用户自定义函数(UDF)定义ROV的非稳态运动,而Xflow软件提供了更加简易的运动函数编辑窗口。
与基于RANS的CFD软件相比,基于LBM的Xflow软件虽然拥有更好的并行计算能力,但需要占用更大的数据存储空间。本文稳态运动模拟中,Fluent软件单次仿真约占用25 GB存储空间,Xflow软件约占120 GB;在Xflow软件中对大振幅非稳态运动模拟时,设定物理仿真时间20 s,单次仿真数据占用约220 GB存储空间,仿真计算时长约10 h.
5 操纵性运动仿真
本节将在Simulink软件中对ROV的直航运动、水平面回转运动和三维螺旋运动进行仿真。图23所示为Simulink软件中搭建的运动仿真系统,通过设置不同的推力向量τ,根据ROV的运动状态是否为对应标准操纵性运动,来验证所求水动力系数和运动模型的有效性。图23中,s为拉普拉斯算子。

图23 ROV操纵性运动仿真框图Fig.23 Block diagram of ROV maneuverability motion simulation
5.1 直航运动
直航运动仿真时,仅对ROV施加纵向推力Fx. 图24所示为ROV航速随推力的变化曲线。从图24中可以看出: ROV由静止开始加速,当所受水动力与推力平衡时速度趋于稳定;随着纵向推力的增加,ROV的加速阶段缩短,符合一般水下航行器的直航运动规律。推进器能提供的最大纵向推力约为200 N,最大航速umax=1.138 m/s. 此外,由于浮力大于重力,ROV同时具有上升速度w,最大纵向推力200 N时,上升速度最终稳定在0.043 1 m/s.
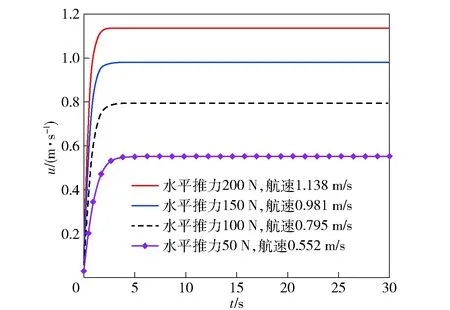
图24 不同推力作用下ROV的航速Fig.24 Velocities of ROV under different thrust forces
5.2 水平回转运动
ROV在固定的纵向推力Fx和摇艏力矩N下运动轨迹应为水平回转运动。为了检验平面机动性能,设置摇艏力矩为最大值,即Nmax=8.44 N·m,此时纵向推力Fx=62.367 N. 由于浮力大于重力,ROV实际运动为螺旋上升运动,三维轨迹见图25(a),Oxy平面内的投影见图25(b)。仿真结果表明,ROV进入匀速回转后,纵向速度u=0.628 m/s,垂向升速w=0.043 m/s,摇艏角速度r=0.13 rad/s,回转直径约为D=9.4 m. 可见,所求运动模型在纵向推力和摇艏力矩作用下可实现回转运动,符合水下航行器水平回转运动的一般规律。

图25 ROV平面回转运动的轨迹Fig.25 Trajectory of ROV in rotational motion
5.3 三维螺旋运动
在水平回转的基础上施加垂向推力Fz,则ROV的实际运动应为三维螺旋运动。令垂向推力Fz=100 N,三维轨迹见图26(a),水平面和垂直面投影见图26(b)和图26(c)。由图26可知,稳定后ROV的纵向速度u=0.584 m/s,下潜速度w=0.287 m/s,摇艏角速度r=0.214 rad/s,回转直径D≈2 m. 可见,所求运动模型可实现预期的三维螺旋运动。但相比水平回转运动,由于垂向速度较大,ROV受到更大的耦合横向力Fy和耦合摇艏力矩N,从而具有更大的横向速度和摇艏角速度,使得回转半径明显缩小。
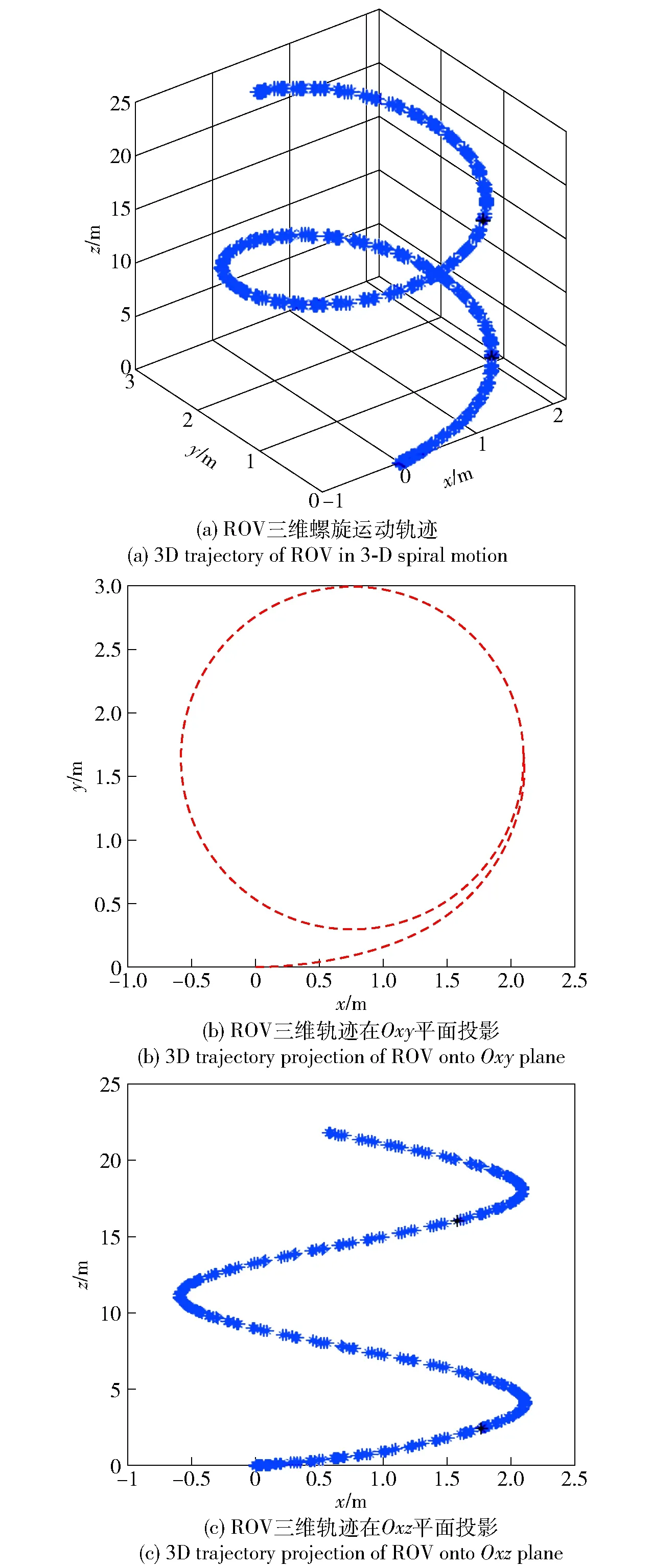
图26 三维螺旋运动ROV的轨迹Fig.26 Trajectory of ROV in 3D spiral motion
此外,ROV在螺旋上升时前后受到的垂向水动力不相等,从而形成俯仰力矩。在俯仰力矩作用下ROV俯仰角变化如图27所示,稳定时仰角θ=32.78°.
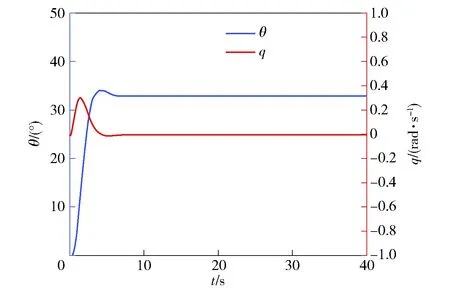
图27 ROV俯仰角θ和俯仰角速度qFig.27 ROV pitch angle θ and pitch angle velocity q
ROV标准机动性操作仿真的结果,验证了所求6自由度运动方程的有效性,可以被用于对ROV的操纵性进行预报和控制算法的研究。
6 结论
本文针对一类具有复杂外形的开架式水下机器人,提出一种基于LBM实现LAPMM试验模拟,以方便快捷地获取水动力系数的方法。得出如下主要结论:
1)对比LBM和RANS方法在稳态纵荡和斜航仿真结果发现,纵荡模拟时纵向力和斜航模拟中横向力的计算值、ROV表面压力分布和形成的流场均基本一致,验证了LBM方法模拟水下机器人运动的可行性。
2)构建了LAPMM试验严格的运动函数和考虑ROV结构不对性的水动力模型。水动力模型的预报值与CFD仿真结果的拟合优度均大于0.9,且水动力系数辨识结果表明由于ROV结构上下不对称而修正黏性水动力系数十分必要。
3)与基于RANS方法的Fluent软件相比,基于LBM的Xflow软件在水动力系数求解中不需要网格划分,不受水下机器人复杂程度和运动振幅限制,通过LAPMM试验模拟极大地降低了水动力系数的数值计算难度和求解周期。Xflow虽然具有更好的并行计算能力,但同时需要更大的数据存储空间。
4)操纵性运动仿真结果符合水下航行器一般运动规律,验证了所建立6自由度动力学模型的有效性,为后续水下机器人控制算法的研究做好了铺垫。
猜你喜欢
大电机技术(2022年4期)2022-08-30
农业工程学报(2022年10期)2022-08-22
大电机技术(2022年3期)2022-08-06
上海师范大学学报·自然科学版(2022年3期)2022-07-11
华人时刊(2021年23期)2021-03-08
当代陕西(2019年14期)2019-08-26
作文新天地(初中版)(2019年6期)2019-08-15
读者·校园版(2019年16期)2019-07-31
华人时刊(2017年17期)2017-11-09
现代养生·上半月(2009年10期)2009-11-16