自研高精度pH传感器的标定、校正方法及其在海水原位观测中的应用
2021-11-10 03:54张楚青吴建波黄元凤陶春辉
海洋学研究 2021年2期
金 铨,张楚青,,吴建波,张 潇,叶 瑛,黄元凤,陶春辉
(1.浙江大学 海洋学院,浙江 舟山 316021;2.自然资源部 第二海洋研究所,浙江 杭州 310012;3.中电海康集团有限公司,浙江 杭州 311100;4.山东特种设备检验检测集团有限公司,山东 济南 250002)
0 引言
利用低成本的小型传感器进行海水pH原位观测,取代现场采样,是当前国内外相关领域的研究热点[1-3]。依照检测原理的不同,原位pH传感器主要可分为两类:一类是光谱传感器,基于特定波段的吸光度差异的分光光度法,最优精度可达到0.01 pH单位[4-5];另一类是电化学传感器,基于Nernst方程原理,最优精度达0.02 pH单位[6-7]。电极敏感膜的响应电位与待测离子浓度(活度)的对数存在特定斜率的线性关系,此电极电位响应称之为Nernst响应,特定斜率称为Nernst斜率。电化学传感器结构设计简单,能耗低,更易于实现长期、高频测量[8-10]。本研究中的pH传感器属于电化学传感器的一种,自主研发、设备集成化程度高、外观小巧,可以满足水下原位测试要求,核心部分为全固态铱/氧化铱[Ir/Ir(OH)x]pH微电极[11-14]。
pH测量为一种间接的、相对的测量,需要进行pH标定。基于Nernst方程原理的电化学传感器在海水环境中易受干扰、信号不稳定、系统误差较大[15-16],分析时选择合适的pH标度可减小该误差。常用海水pH标度包括以前美国国家标准局National Bureau of Standard首字母缩写来命名的NBS标度、自由氢离子标度与总氢离子浓度标度(Total hydrogen-ion concentration scale,下文称pHT标度)等[17]。NBS标度由于相关缓冲溶液的离子强度较低,在海水pH分析领域已普遍不被采用[8-9,18]。pHT标度是海水pH测定中最为推荐的体系之一,主要包括基于人工海水配制的三羟甲基氨基甲烷(tris)及2-氨基吡啶(2-Aminopyridine, AMP)等标准缓冲溶液[19]。
与实验室测定相比,原位测定面临的现实环境复杂,同时缺乏用标准试剂频繁标定的条件,通常需要在后期对数据进行校正。由于标定时的温度条件和实际测定时的无法一致,为减少直接应用标定温度引入的误差,可对传感器测得的原位数据进行温度校正[20]。研究表明,对于南、北纬50°之间开阔大洋的表层海水,其pH值与温度符合高度线性相关,可通过电位值-温度的线性关系对传感器的测试结果进行温度校正[21]。
本研究针对自研高精度pH传感器,建立了仪器标定和数据处理方法,通过传感器在两个海区的现场应用,检验了上述方法在不同海水条件下对pH测定精度的改善效果,对实现高精度原位观测具有重要价值。
1 设备与原理
1.1 硬件设备
海水pH传感器由课题组自主研发设计[13-14],下文简称“自研pH传感器”。传感器内部结构和外观如图1所示,钛合金外壳内封装有大容量电池组与自主研发的电路系统,集数据采集、储存和传输等功能于一体,可支持水下长期测量。pH探头由Ag/AgCl参比电极、铂电极及Ir/Ir(OH)x电极组成[22]。
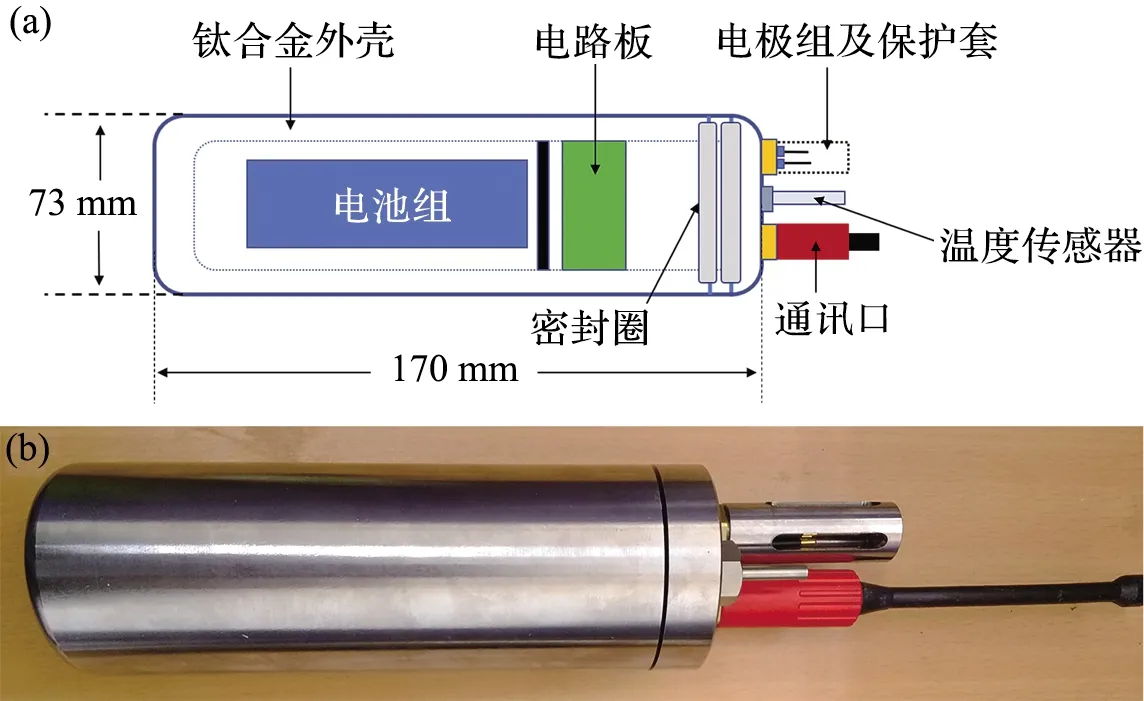
图1 集成式pH传感器内部结构示意图(a)与实际外观照片(b)Fig.1 Internal structure diagram(a) and actual appearance photo(b) of integrated pH sensor
1.2 检测原理
核心部件Ir/Ir(OH)x-pH电极属于氢离子选择性电极,通过电化学工作站循环伏安法制备,具体过程参考文献[12]。铱氧化物(IrOx)为电极敏感膜的主要成分,具有较高水合状态,也被记作Ir(OH)x。膜表面IrO2发生氧化还原反应产生电位响应[23]:
2IrO2+2H++2e-=Ir2O3+H2O
(1)
符合Nernst方程原理的单个电极的电位EIr /Ir(OH )x满足如下关系式[24]:
(2)
式中:Eθ为标准电极电位,文中为标准氢电极电位,单位:mV;R为摩尔气体常数,值为8.314 J/(K·mol);F为法拉第常数,值为96 485 C/mol;T为热力学温度,单位:K。
由于单个电极的电势值无法测量,实际测量中将pH电极(又称指示电极)与参比电极相连,与电解质溶液构成原电池测试单元,电池输出的电位E为
E=EIr/Ir(OH )x-Er
(3)
式中:Er代表参比电极的响应电位,单位:mV。
由于测定过程中认为Er保持不变[25],当温度一定时,可认为输出电位E与pH值呈线性相关。
2 方法
2.1 海水pH标度
在本研究中NBS标度仅用于检验传感器的性能合格性,不直接用于海水pH观测值的解释和计算。本文采用pHT标度对传感器进行标定,配制tris及AMP两种缓冲溶液[8, 19],试剂组成如表1所示。用分光光度法测定各溶液的pH值,对比测定值与参考文献[8]中的pH标准值(tris为8.093 6,AMP为6.786 6),若误差<1%,判定该缓冲溶液可用于传感器的现场两点标定。
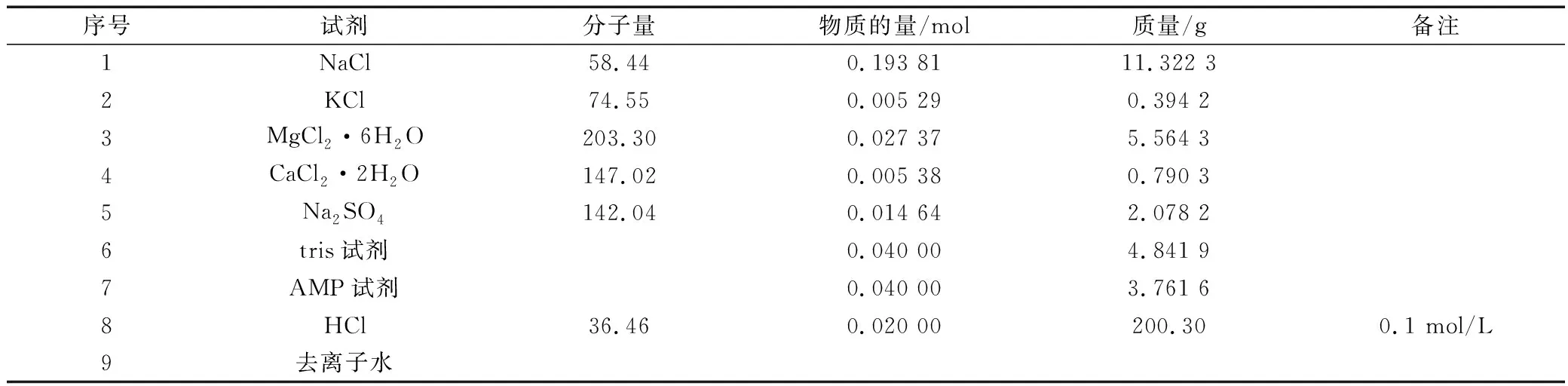
表1 总氢离子浓度标度下tris与AMP标准缓冲溶液的试剂组成[8]Tab.1 Composition of tris and AMP buffer solution under pHT scale[8]
2.2 传感器的标定
分别测试传感器在3种溶液中的电位响应时间,由图2可见响应时间差异较大。AMP缓冲溶液中电位稳定所需时间最长,大于10 min,操作效率较低,不适宜作为现场标定溶液。tris标准缓冲溶液与标准海水的响应时间短,信号稳定,可作为现场标定溶液。标准海水基准物(Dickson海水,Batch 137, pH25=7.871 96)购自Scripps海洋研究所。
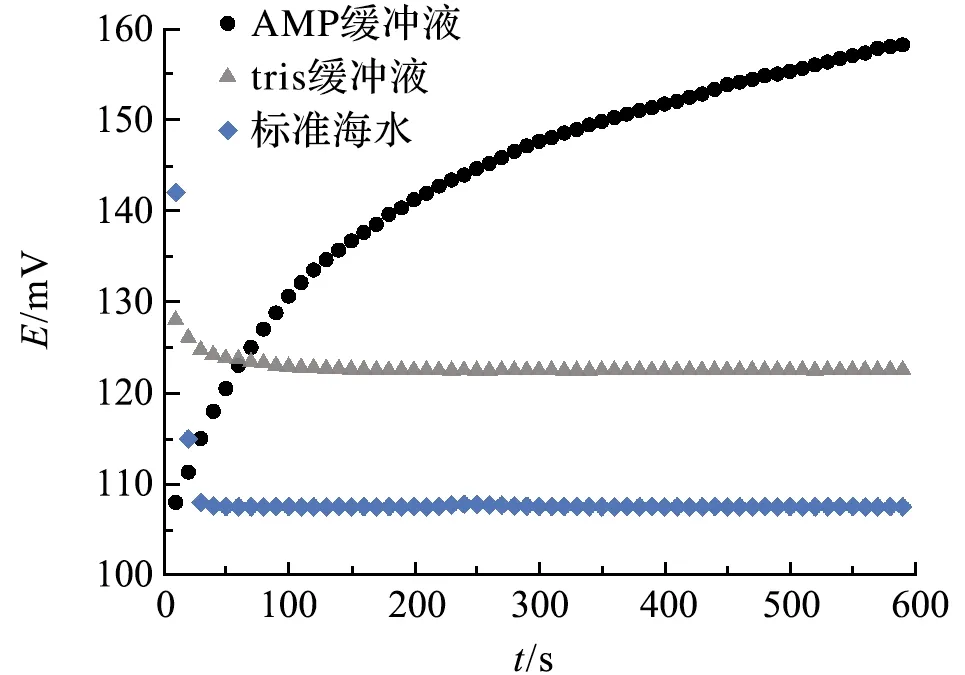
图2 传感器在3种溶液中的电位响应情况Fig.2 Potential response of pH sensor in three solutions
图3为在25 ℃条件下传感器在NBS标度与pHT标度下的电位响应情况。NBS标度的标定对象为pH 2.00~10.00的商业标准缓冲溶液,pHT标度的标定对象为tris标准缓冲溶液与标准海水,测试按照pH由低到高的顺序进行。在NBS标度下传感器呈现良好的Nernst响应,拟合曲线的相关系数R2>0.999,斜率值为-57.373,与此温度下的Nernst斜率理论值(-59.18)[12]相接近,表明传感器pH电极性能合格。相同实验条件下两点标定工作曲线的斜率值为-63.18。
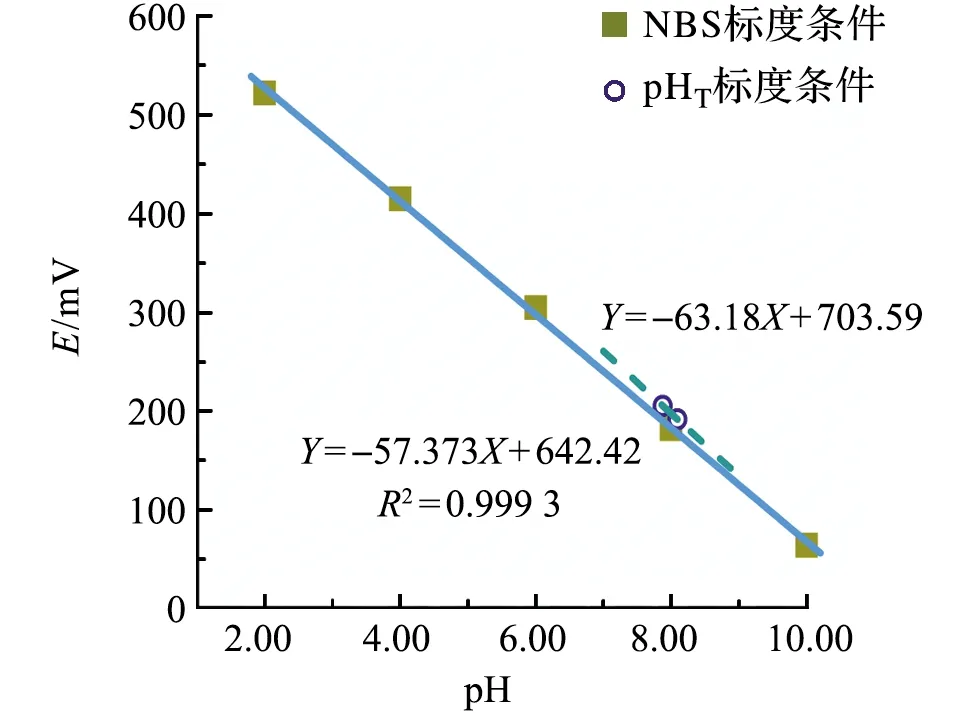
图3 pH传感器在2种标度下的缓冲溶液中的标定曲线Fig.3 Calibration results of pH sensor in buffer system under two scale conditions
在实际应用中传感器可能会因测试环境状态改变等原因导致整个测试过程偏离原先选定的标定条件,因此需对标定曲线进行校正,前人研究结果[26]表明此偏差主要表现在截距上。实际操作过程中,可在传感器入水前通过测试已知样品的电位,依据Nernst方程进行求解来确定最终标定曲线。
2.3 数据校正
2.3.1 温度校正
测试过程中,自研pH传感器的在线测试温度很难与标定环境温度保持一致,直接利用标定所得的结果进行高精度的分析计算将引入误差,因此对所得信号的温度背景有必要进行统一校正。研究表明,对于南、北纬50°之间开阔大洋的表层海水,其pH值与温度符合高度线性相关,满足关系式[21]:
pHin-situ=pH25+aT×(Tc-25)
(4)
式中:pHin-situ代表原位条件下的pH;pH25为25 ℃下的pH;aT为pH-温度线性变化系数,大洋海水的变化系数值为-0.015 1,单位:pH/℃;Tc为原位测试条件下的温度,单位:℃。
在0~40 ℃范围内,自研pH传感器的电位响应与温度存在高度线性相关[26],因此可通过电位值-温度的线性关系对传感器的测试结果进行温度校正。温度25 ℃条件下,测试电位E25满足:
E25=Es+AE×(25-Tc)
(5)
式中:Es为预校正后的原始输出电位值,单位:mV;Tc为环境温度测量值,单位:℃;AE为待测溶液的电位-温度特性系数,单位:mV/℃,本研究引用大洋海水pH温度变化的系数值-0.015 1作为pH传感器电位的温度特性系数值进行计算。
2.3.2 误差校正
2.3.2.1 预校正
误差的预校正分为强度校正和零点校正,作为对传感器获得电位信号的预处理用于后续计算。
由于设备电路系统自身存在的电磁干扰,传感器在信号输出时会导致信号强度误差。信号强度校正的具体操作方法如下:将电路板pH电极并联接在信号源正极上,参比电极接在信号源负极上,实时记录输入的标准信号值Es与电路实际输出的测试结果Ei,将两个电位信号数据进行拟合,获得高度线性相关的响应关系[12]:
Ei=As×Es+Bs
(6)
式中:As为信号响应曲线斜率,表示信号响应系数,无单位;Bs为曲线截距,单位:mV。在实际测试时,Ei代表了pH传感器实际输出的电位信号,Es为根据拟合的响应曲线回归计算的结果,代表设备信号强度校正后的真实电位信号。

2.3.2.2 漂移信号校正
在实际应用过程中,pH传感器上的电极膜材料会由于衰老、污损等多种因素导致电位响应信号漂移,因此分析时需进行漂移校正[23]。大幅度偏离响应趋势的电位波动数据点将作为异常值或噪音点,在数据处理过程中被剔除。当电位信号的采样频率为1次/min时,异常数据剔除的标准为
|En+1-En|>1
(7)
式中:En+1、En为相邻的两次输出电位信号,单位:mV;计算时按上位机实际导出顺序计数n。此式含义为当相邻两组电位响应信号的差值大于1 mV时,第n+1组数据将被视为异常组,被剔除。
剔除异常值后,电位响应信号的时间序列通常拟合出相关性较高的曲线[27],曲线的斜率即电位随时间的漂移系数,因此可以将时间作为变量对漂移信号进行校正。校正后,输出电位Ec表示为
Ec=Es′-Ad×t
(8)
式中:Es′为剔除异常值并经过预校正的电位信号,单位:mV;Ad为电位-时间漂移系数,单位:mV/时间单位;t代表时间。
2.4 海区pH测试
2.4.1 近岸连续观测试验
2015年2月在美国西雅图Elliot Bay 海岸(47°36′26.6″ N, 122°20′36.6″ W)进行传感器的连续观测试验,表层海水温度约为9 ℃。设计深度为1 m的水箱,置于海岸附近10 m深处,海水流通速率约为 400 L/min。传感器固定于水箱中部,深0.5 m处,进行水下连续测试,信号采样频率设置为1次/min,共持续30 d。同步通过CTD测定水箱温度,用以传感器温度的误差校正。
2.4.2 大洋观测试验
2015年8月3日在美国西南部Newport Harbor海域,利用pH传感器进行了实地海水pH剖面测试作业[12],现场信息记录如表2如示。观测海域表层海水平均温度约为21 ℃。同步布放Sea-Bird商业海水pH传感器1套,固定于CTD仪上,下放至水深约62 m处,短暂停留后,以相同的速度将设备上拉至水面。两套pH传感器测试频率均设为8 Hz。自研传感器下水前,利用tris标准缓冲溶液和标准海水进行两点法现场标定。
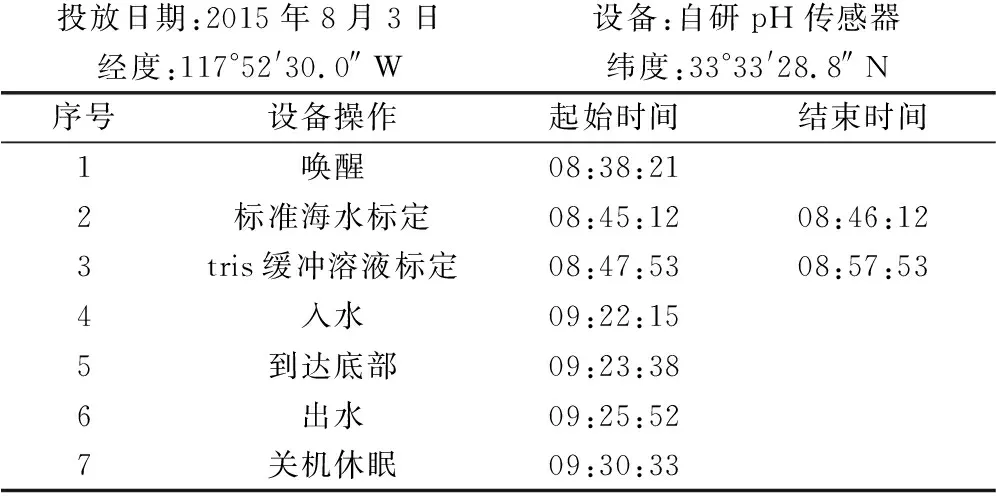
表2 海试时间记录表Tab.2 Sea trial time record
3 结果与分析
3.1 近岸连续观测试验结果
将自研制pH传感器装入特制水箱置于近岸环境中进行海水的连续观测,部分原始数据见表3。观测开始前先进行现场标定,得到斜率值为-73.03,其绝对值大于理论值,表明电极性能表现出了超Nernst响应。这可能与测试环境温度较低有关,低温导致传感器电极敏感膜的水合程度较高[28-29]。
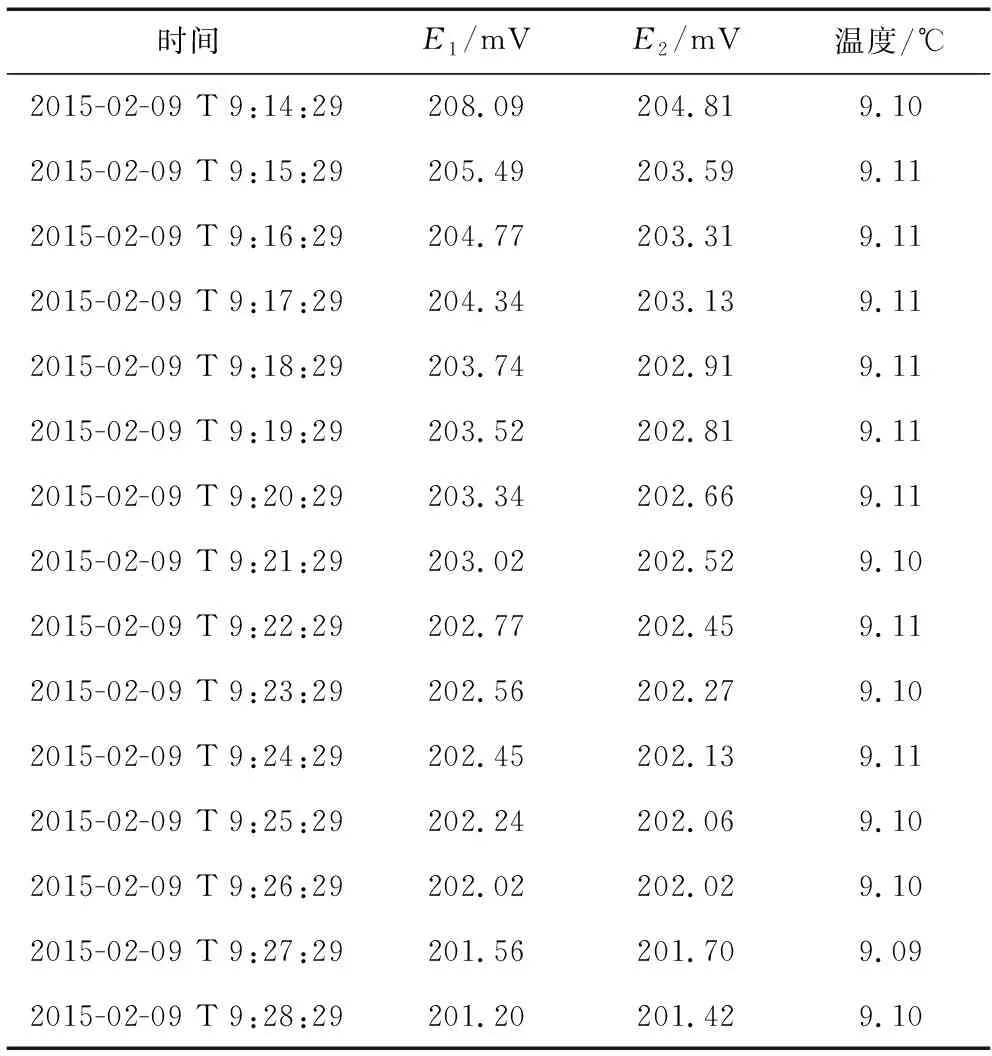
表3 自研pH传感器原始数据(部分)Tab.3 Original data of the self-developed pH sensor (partially listed)
将两个信号通道原始电位平均值作时间序列分布图(图4a),电位信号的漂移幅度可达数百毫伏。剔除异常值后对电位进行小时平均,可见电位-时间序列呈高度线性相关,相关系数R2为0.95(图4b)。经校正,电位变化幅度减小至100 mV以内(图4c)。
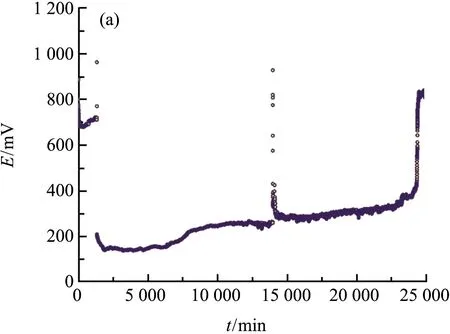
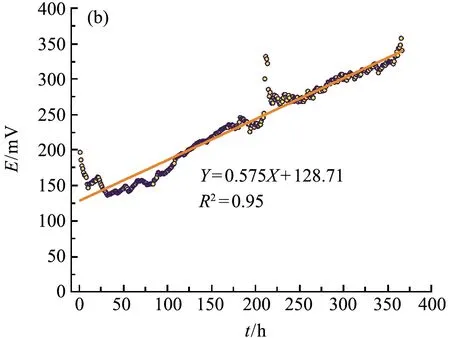
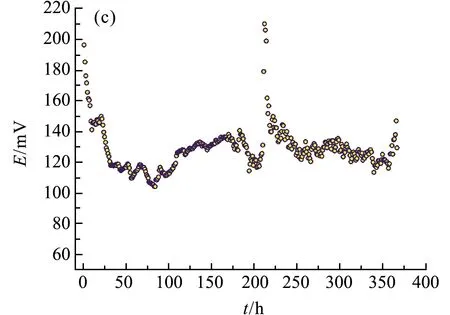
图4 自研pH传感器在近岸观测中的电位信号校正前后时间序列Fig.4 Time series before and after correction of potential signal of the self-developed pH sensor in nearshore test(a.原始信号校正前的时间序列分布;b.原始信号进行异常值剔除并取每小时平均值的时间序列分布;c.校正后的时间序列分布)(a. time series distribution of original signal before correction;b. time series distribution of hourly averages after elimination of outliers; c. corrected time series distribution)
图5为基于电极Nernst方程原理的pH计算结果,绿色点表示根据未进行误差校正的电位数据代入本文所述pHT标度下标定所得的工作曲线计算得到的pH结果分布,结果漂移可达3.00 pH单位,对其进行误差校正后(蓝色点),pH值主要分布在7.80~8.00区间,呈先升高后降低的趋势,存在明显昼夜波动。NBS标度标定参数(同样经误差校正,黑色点)的pH主要分布在8.80~9.00 区间,与改进后的pHT标度标定(蓝色点)的pH值相差可达1.00 pH单位。
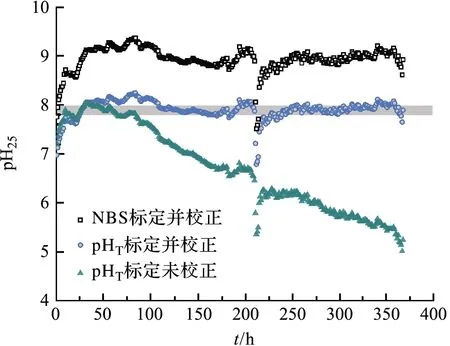
图5 自研传感器在近岸观测试验中pH结果时间序列的校正前后对比图Fig.5 Comparison of time series of pH results of the self-developed sensor in nearshore test before and after calibration
将经完整标定与校正后的测量结果与此次测试活动举办方提供的参考标准值[4]进行了对比,自研传感器的测试结果仍存在0.20~0.40 pH单位的误差。分析认为这可能与测试过程中定期通入的臭氧有关,已有研究[14]表明,电极敏感膜对氧化还原条件变化非常敏感。
3.2 大洋观测试验结果
在离岸大洋环境的现场测试时间为3 min,传感器每秒钟记录8组信号。现场标定采用tris标准缓冲溶液与标准海水,获取的标定曲线斜率值为-54.48,接近Nernst斜率理论值,被用于后续pH结果计算。图6为自研传感器测试上拉段校正前后pH结果对比,40 m深度处差异最大,可达0.10 pH单位。

图6 自研传感器在大洋观测试验上拉段中误差校正前后结果对比Fig.6 Comparison of results before and after error correction of the self-developed sensor in oceanic test
与Sea-Bird商业pH传感器(集成于Sea-Bird 911 plus CTD)同步测定剖面pH值的对比结果见图7。下放时pH值均表现为随水深的增加而显著减小,下放至底部作短暂停留后,以相同的速度上拉至水面,上拉时海水pH值随着深度减小而变大。由图可见,在此次测试进行的浅水环境(深度小于100 m)中,相同深度时两种传感器测试结果相差极小,最大差值仅为0.05 pH单位。在同一深度下,两种传感器均表现出上拉过程中所测值相对较小,下放过程则相对较大。在0~40 m水深范围内,自研pH传感器上拉和下放段的曲线重合性更高,表明其信号漂移量较小,精度更高。
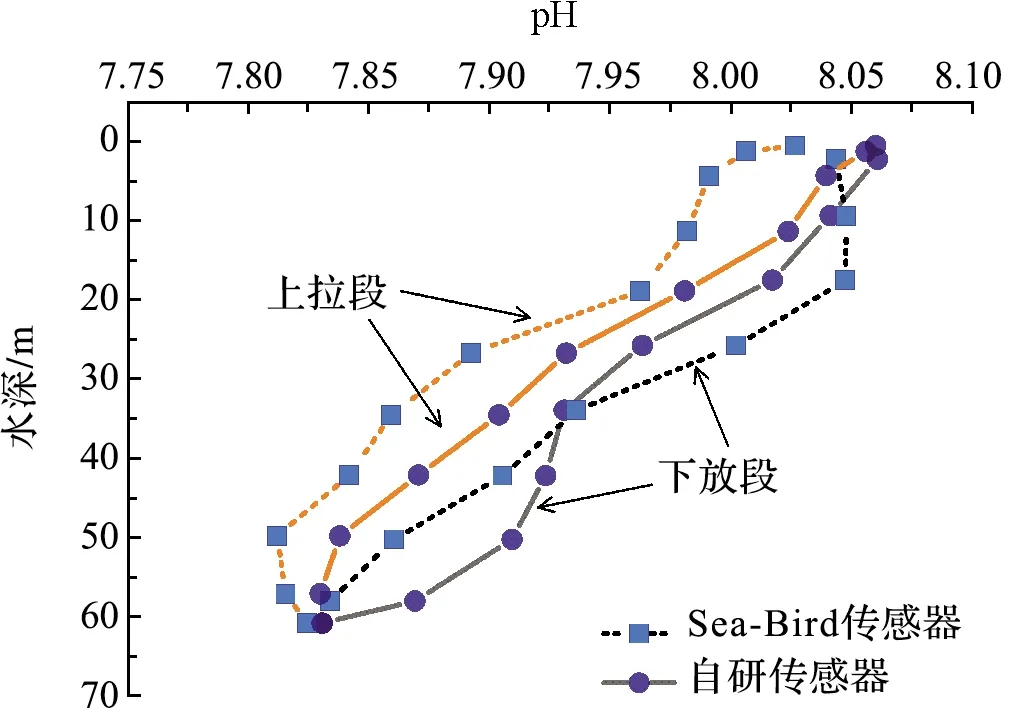
图7 两种传感器在大洋海试中的pH测试结果与水深分布示意图[12]Fig.7 Schematic diagram of pH test results and water depth distribution of two sensors in oceanic test[12]
4 结论
本研究展现了一种基于电极电位分析的自研pH传感器在高精度海水分析需求下的现场标定和数据校正方法。现场标定包括:(1) 根据海水离子强度差异及传感器实际响应状况,选择tris标准缓冲溶液及标准海水进行现场两点标定;(2) 传感器测量过程中对原始电位数据和信号强度进行校正,测量后对原位观测数据进行零点校正和信号漂移校正;(3) 通过pH温度特性参数(-0.015 1 pH/℃)对温度背景进行统一,减少标定环境和测试环境温度差异引入的计算偏差,提高原位观测结果的可靠性。
通过自研pH传感器在近岸和离岸海水环境中的应用,发现标定体系差异带来的误差可达1.00 pH 单位,传感器测试信号的漂移会引入0.10~3.00 pH单位不等的误差。本文所述规范化的标定及数据校正的方法可有效缩小这两种来源的误差,提高pH传感器在原位观测中的精度。在与商业pH传感器的测试对比中也展现了自研设备良好的分析性能。
猜你喜欢
四川大学学报(自然科学版)(2022年1期)2022-02-10
国学(2020年1期)2020-06-29
汽车维修与保养(2020年11期)2020-06-09
四川大学学报(自然科学版)(2020年3期)2020-06-03
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
家庭影院技术(2018年11期)2019-01-21
计算机应用与软件(2018年12期)2018-12-13
摄影之友(影像视觉)(2017年10期)2017-11-07
科技经济市场(2017年5期)2017-09-16